In computer science, a sorting algorithm is an algorithm that puts elements of a list into an order. The most frequently used orders are numerical order and lexicographical order, and either ascending or descending. Efficient sorting is important for optimizing the efficiency of other algorithms (such as search and merge algorithms) that require input data to be in sorted lists. Sorting is also often useful for canonicalizing data and for producing human-readable output.
From the beginning of computing, the sorting problem has attracted a great deal of research, perhaps due to the complexity of solving it efficiently despite its simple, familiar statement. Among the authors of early sorting algorithms around 1951 was Betty Holberton, who worked on ENIAC and UNIVAC.[1][2]Bubble sort was analyzed as early as 1956.[3] Asymptotically optimal algorithms have been known since the mid-20th century– new algorithms are still being invented, with the widely used Timsort dating to 2002, and the library sort being first published in 2006.
Comparison sorting algorithms have a fundamental requirement of Ω(n log n) comparisons (some input sequences will require a multiple of n log n comparisons, where n is the number of elements in the array to be sorted). Algorithms not based on comparisons, such as counting sort, can have better performance.
Sorting small arrays optimally (in the fewest comparisons and swaps) or fast (i.e. taking into account machine-specific details) is still an open research problem, with solutions only known for very small arrays (<20 elements). Similarly optimal (by various definitions) sorting on a parallel machine is an open research topic.
Best, worst and average case behavior in terms of the size of the list. For typical serial sorting algorithms, good behavior is O(nlogn), with parallel sort in O(log2n), and bad behavior is O(n2). Ideal behavior for a serial sort is O(n), but this is not possible in the average case. Optimal parallel sorting is O(logn).
Swaps for "in-place" algorithms.
Memory usage (and use of other computer resources). In particular, some sorting algorithms are "in-place". Strictly, an in-place sort needs only O(1) memory beyond the items being sorted; sometimes O(logn) additional memory is considered "in-place".
Recursion: Some algorithms are either recursive or non-recursive, while others may be both (e.g., merge sort).
Stability: stable sorting algorithms maintain the relative order of records with equal keys (i.e., values).
Whether or not they are a comparison sort. A comparison sort examines the data only by comparing two elements with a comparison operator.
General method: insertion, exchange, selection, merging, etc. Exchange sorts include bubble sort and quicksort. Selection sorts include cycle sort and heapsort.
Whether the algorithm is serial or parallel. The remainder of this discussion almost exclusively concentrates on serial algorithms and assumes serial operation.
Adaptability: Whether or not the presortedness of the input affects the running time. Algorithms that take this into account are known to be adaptive.
Online: An algorithm such as Insertion Sort that is online can sort a constant stream of input.
Stability
An example of stable sort on playing cards. When the cards are sorted by rank with a stable sort, the two 5s must remain in the same order in the sorted output that they were originally in. When they are sorted with a non-stable sort, the 5s may end up in the opposite order in the sorted output.
Stable sort algorithms sort equal elements in the same order that they appear in the input. For example, in the card sorting example to the right, the cards are being sorted by their rank, and their suit is being ignored. This allows the possibility of multiple different correctly sorted versions of the original list. Stable sorting algorithms choose one of these, according to the following rule: if two items compare as equal (like the two 5 cards), then their relative order will be preserved, i.e. if one comes before the other in the input, it will come before the other in the output.
Stability is important to preserve order over multiple sorts on the same data set. For example, say that student records consisting of name and class section are sorted dynamically, first by name, then by class section. If a stable sorting algorithm is used in both cases, the sort-by-class-section operation will not change the name order; with an unstable sort, it could be that sorting by section shuffles the name order, resulting in a nonalphabetical list of students.
More formally, the data being sorted can be represented as a record or tuple of values, and the part of the data that is used for sorting is called the key. In the card example, cards are represented as a record (rank, suit), and the key is the rank. A sorting algorithm is stable if whenever there are two records R and S with the same key, and R appears before S in the original list, then R will always appear before S in the sorted list.
When equal elements are indistinguishable, such as with integers, or more generally, any data where the entire element is the key, stability is not an issue. Stability is also not an issue if all keys are different.
Unstable sorting algorithms can be specially implemented to be stable. One way of doing this is to artificially extend the key comparison so that comparisons between two objects with otherwise equal keys are decided using the order of the entries in the original input list as a tie-breaker. Remembering this order, however, may require additional time and space.
One application for stable sorting algorithms is sorting a list using a primary and secondary key. For example, suppose we wish to sort a hand of cards such that the suits are in the order clubs (♣), diamonds (♦), hearts (♥), spades (♠), and within each suit, the cards are sorted by rank. This can be done by first sorting the cards by rank (using any sort), and then doing a stable sort by suit:
Within each suit, the stable sort preserves the ordering by rank that was already done. This idea can be extended to any number of keys and is utilised by radix sort. The same effect can be achieved with an unstable sort by using a lexicographic key comparison, which, e.g., compares first by suit, and then compares by rank if the suits are the same.
Comparison of algorithms
This analysis assumes that the length of each key is constant and that all comparisons, swaps and other operations can proceed in constant time.
Legend:
n is the number of records to be sorted.
Comparison column has the following ranking classifications: "Best", "Average" and "Worst" if the time complexity is given for each case.
"Memory" denotes the amount of additional storage required by the algorithm.
The run times and the memory requirements listed are inside big O notation, hence the base of the logarithms does not matter.
Complexities below assume n items to be sorted, with keys of size k, digit size d, and r the range of numbers to be sorted.
Many of them are based on the assumption that the key size is large enough that all entries have unique key values, and hence that n ≪ 2k, where ≪ means "much less than".
In the unit-cost random-access machine model, algorithms with running time of , such as radix sort, still take time proportional to Θ(n log n), because n is limited to be not more than , and a larger number of elements to sort would require a bigger k in order to store them in the memory.[13]
Requires uniform distribution of elements from the domain in the array to run in linear time. If distribution is extremely skewed then it can go quadratic if underlying sort is quadratic (it is usually an insertion sort). In-place version is not stable.
A variation of bucket sort, which works very similarly to MSD Radix Sort. Specific to post service needs.
Samplesort can be used to parallelize any of the non-comparison sorts, by efficiently distributing data into several buckets and then passing down sorting to several processors, with no need to merge as buckets are already sorted between each other.
Others
Some algorithms are slow compared to those discussed above, such as the bogosort with unbounded run time and the stooge sort which has O(n2.7) run time. These sorts are usually described for educational purposes to demonstrate how the run time of algorithms is estimated. The following table describes some sorting algorithms that are impractical for real-life use in traditional software contexts due to extremely poor performance or specialized hardware requirements.
Works only with positive integers. Requires specialized hardware for it to run in guaranteed time. There is a possibility for software implementation, but running time will be , where S is the sum of all integers to be sorted; in the case of small integers, it can be considered to be linear.
This is a linear-time, analog algorithm for sorting a sequence of items, requiring O(n) stack space, and the sort is stable. This requires n parallel processors. See spaghetti sort#Analysis.
Slower than most of the sorting algorithms (even naive ones) with a time complexity of O(nlog 3 / log 1.5 ) = O(n2.7095...) Can be made stable, and is also a sorting network.
Makes O(n) data moves in the worst case. Possesses ideal comparison sort asymptotic bounds but is only of theoretical interest.
Theoretical computer scientists have detailed other sorting algorithms that provide better than O(n log n) time complexity assuming additional constraints, including:
Thorup's algorithm, a randomized algorithm for sorting keys from a domain of finite size, taking O(n log log n) time and O(n) space.[19]
A randomized integer sorting algorithm taking expected time and O(n) space.[20]
One of the authors of the previously mentioned algorithm also claims to have discovered an algorithm taking time and O(n) space, sorting real numbers.[21] Further claiming that, without any added assumptions on the input, it can be modified to achieve time and O(n) space.
Popular sorting algorithms
While there are a large number of sorting algorithms, in practical implementations a few algorithms predominate. Insertion sort is widely used for small data sets, while for large data sets an asymptotically efficient sort is used, primarily heapsort, merge sort, or quicksort. Efficient implementations generally use a hybrid algorithm, combining an asymptotically efficient algorithm for the overall sort with insertion sort for small lists at the bottom of a recursion. Highly tuned implementations use more sophisticated variants, such as Timsort (merge sort, insertion sort, and additional logic), used in Android, Java, and Python, and introsort (quicksort and heapsort), used (in variant forms) in some C++ sort implementations and in .NET.
For more restricted data, such as numbers in a fixed interval, distribution sorts such as counting sort or radix sort are widely used. Bubble sort and variants are rarely used in practice, but are commonly found in teaching and theoretical discussions.
When physically sorting objects (such as alphabetizing papers, tests or books) people intuitively generally use insertion sorts for small sets. For larger sets, people often first bucket, such as by initial letter, and multiple bucketing allows practical sorting of very large sets. Often space is relatively cheap, such as by spreading objects out on the floor or over a large area, but operations are expensive, particularly moving an object a large distance – locality of reference is important. Merge sorts are also practical for physical objects, particularly as two hands can be used, one for each list to merge, while other algorithms, such as heapsort or quicksort, are poorly suited for human use. Other algorithms, such as library sort, a variant of insertion sort that leaves spaces, are also practical for physical use.
Simple sorts
Two of the simplest sorts are insertion sort and selection sort, both of which are efficient on small data, due to low overhead, but not efficient on large data. Insertion sort is generally faster than selection sort in practice, due to fewer comparisons and good performance on almost-sorted data, and thus is preferred in practice, but selection sort uses fewer writes, and thus is used when write performance is a limiting factor.
Insertion sort is a simple sorting algorithm that is relatively efficient for small lists and mostly sorted lists, and is often used as part of more sophisticated algorithms. It works by taking elements from the list one by one and inserting them in their correct position into a new sorted list similar to how one puts money in their wallet.[22] In arrays, the new list and the remaining elements can share the array's space, but insertion is expensive, requiring shifting all following elements over by one. Shellsort is a variant of insertion sort that is more efficient for larger lists.
Selection sort is an in-placecomparison sort. It has O(n2) complexity, making it inefficient on large lists, and generally performs worse than the similar insertion sort. Selection sort is noted for its simplicity and also has performance advantages over more complicated algorithms in certain situations.
The algorithm finds the minimum value, swaps it with the value in the first position, and repeats these steps for the remainder of the list.[23] It does no more than n swaps and thus is useful where swapping is very expensive.
Efficient sorts
Practical general sorting algorithms are almost always based on an algorithm with average time complexity (and generally worst-case complexity) O(n log n), of which the most common are heapsort, merge sort, and quicksort. Each has advantages and drawbacks, with the most significant being that simple implementation of merge sort uses O(n) additional space, and simple implementation of quicksort has O(n2) worst-case complexity. These problems can be solved or ameliorated at the cost of a more complex algorithm.
While these algorithms are asymptotically efficient on random data, for practical efficiency on real-world data various modifications are used. First, the overhead of these algorithms becomes significant on smaller data, so often a hybrid algorithm is used, commonly switching to insertion sort once the data is small enough. Second, the algorithms often perform poorly on already sorted data or almost sorted data – these are common in real-world data and can be sorted in O(n) time by appropriate algorithms. Finally, they may also be unstable, and stability is often a desirable property in a sort. Thus more sophisticated algorithms are often employed, such as Timsort (based on merge sort) or introsort (based on quicksort, falling back to heapsort).
Merge sort takes advantage of the ease of merging already sorted lists into a new sorted list. It starts by comparing every two elements (i.e., 1 with 2, then 3 with 4...) and swapping them if the first should come after the second. It then merges each of the resulting lists of two into lists of four, then merges those lists of four, and so on; until at last two lists are merged into the final sorted list.[24] Of the algorithms described here, this is the first that scales well to very large lists, because its worst-case running time is O(n log n). It is also easily applied to lists, not only arrays, as it only requires sequential access, not random access. However, it has additional O(n) space complexity and involves a large number of copies in simple implementations.
Merge sort has seen a relatively recent surge in popularity for practical implementations, due to its use in the sophisticated algorithm Timsort, which is used for the standard sort routine in the programming languages Python[25] and Java (as of JDK7[26]). Merge sort itself is the standard routine in Perl,[27] among others, and has been used in Java at least since 2000 in JDK1.3.[28]
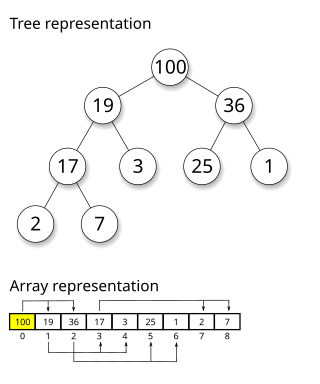
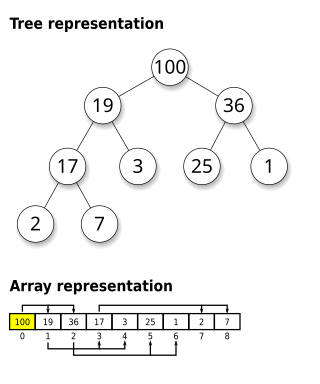
Heapsort is a much more efficient version of selection sort. It also works by determining the largest (or smallest) element of the list, placing that at the end (or beginning) of the list, then continuing with the rest of the list, but accomplishes this task efficiently by using a data structure called a heap, a special type of binary tree.[29] Once the data list has been made into a heap, the root node is guaranteed to be the largest (or smallest) element. When it is removed and placed at the end of the list, the heap is rearranged so the largest element remaining moves to the root. Using the heap, finding the next largest element takes O(log n) time, instead of O(n) for a linear scan as in simple selection sort. This allows Heapsort to run in O(n log n) time, and this is also the worst-case complexity.
Quicksort is a divide-and-conquer algorithm which relies on a partition operation: to partition an array, an element called a pivot is selected.[30][31] All elements smaller than the pivot are moved before it and all greater elements are moved after it. This can be done efficiently in linear time and in-place. The lesser and greater sublists are then recursively sorted. This yields an average time complexity of O(n log n), with low overhead, and thus this is a popular algorithm. Efficient implementations of quicksort (with in-place partitioning) are typically unstable sorts and somewhat complex but are among the fastest sorting algorithms in practice. Together with its modest O(log n) space usage, quicksort is one of the most popular sorting algorithms and is available in many standard programming libraries.
The important caveat about quicksort is that its worst-case performance is O(n2); while this is rare, in naive implementations (choosing the first or last element as pivot) this occurs for sorted data, which is a common case. The most complex issue in quicksort is thus choosing a good pivot element, as consistently poor choices of pivots can result in drastically slower O(n2) performance, but good choice of pivots yields O(n log n) performance, which is asymptotically optimal. For example, if at each step the median is chosen as the pivot then the algorithm works in O(nlogn). Finding the median, such as by the median of mediansselection algorithm is however an O(n) operation on unsorted lists and therefore exacts significant overhead with sorting. In practice choosing a random pivot almost certainly yields O(nlogn) performance.
If a guarantee of O(n log n) performance is important, there is a simple modification to achieve that. The idea, due to Musser, is to set a limit on the maximum depth of recursion.[32] If that limit is exceeded, then sorting is continued using the heapsort algorithm. Musser proposed that the limit should be , which is approximately twice the maximum recursion depth one would expect on average with a randomly ordered array.
Shellsort
A Shellsort, different from bubble sort in that it moves elements to numerous swapping positions.
Shellsort was invented by Donald Shell in 1959.[33] It improves upon insertion sort by moving out of order elements more than one position at a time. The concept behind Shellsort is that insertion sort performs in time, where k is the greatest distance between two out-of-place elements. This means that generally, they perform in O(n2), but for data that is mostly sorted, with only a few elements out of place, they perform faster. So, by first sorting elements far away, and progressively shrinking the gap between the elements to sort, the final sort computes much faster. One implementation can be described as arranging the data sequence in a two-dimensional array and then sorting the columns of the array using insertion sort.
The worst-case time complexity of Shellsort is an open problem and depends on the gap sequence used, with known complexities ranging from O(n2) to O(n4/3) and Θ(n log2n). This, combined with the fact that Shellsort is in-place, only needs a relatively small amount of code, and does not require use of the call stack, makes it is useful in situations where memory is at a premium, such as in embedded systems and operating system kernels.
Bubble sort and variants
Bubble sort, and variants such as the Comb sort and cocktail sort, are simple, highly inefficient sorting algorithms. They are frequently seen in introductory texts due to ease of analysis, but they are rarely used in practice.
Bubble sort
A bubble sort, a sorting algorithm that continuously steps through a list, swapping items until they appear in the correct order.
Bubble sort is a simple sorting algorithm. The algorithm starts at the beginning of the data set. It compares the first two elements, and if the first is greater than the second, it swaps them. It continues doing this for each pair of adjacent elements to the end of the data set. It then starts again with the first two elements, repeating until no swaps have occurred on the last pass.[34] This algorithm's average time and worst-case performance is O(n2), so it is rarely used to sort large, unordered data sets. Bubble sort can be used to sort a small number of items (where its asymptotic inefficiency is not a high penalty). Bubble sort can also be used efficiently on a list of any length that is nearly sorted (that is, the elements are not significantly out of place). For example, if any number of elements are out of place by only one position (e.g. 0123546789 and 1032547698), bubble sort's exchange will get them in order on the first pass, the second pass will find all elements in order, so the sort will take only 2n time.
Comb sort is a relatively simple sorting algorithm based on bubble sort and originally designed by Włodzimierz Dobosiewicz in 1980.[36] It was later rediscovered and popularized by Stephen Lacey and Richard Box with a Byte Magazine article published in April 1991. The basic idea is to eliminate turtles, or small values near the end of the list, since in a bubble sort these slow the sorting down tremendously. (Rabbits, large values around the beginning of the list, do not pose a problem in bubble sort) It accomplishes this by initially swapping elements that are a certain distance from one another in the array, rather than only swapping elements if they are adjacent to one another, and then shrinking the chosen distance until it is operating as a normal bubble sort. Thus, if Shellsort can be thought of as a generalized version of insertion sort that swaps elements spaced a certain distance away from one another, comb sort can be thought of as the same generalization applied to bubble sort.
Exchange sort
Exchange sort is sometimes confused with bubble sort, although the algorithms are in fact distinct.[37][38] Exchange sort works by comparing the first element with all elements above it, swapping where needed, thereby guaranteeing that the first element is correct for the final sort order; it then proceeds to do the same for the second element, and so on. It lacks the advantage that bubble sort has of detecting in one pass if the list is already sorted, but it can be faster than bubble sort by a constant factor (one less pass over the data to be sorted; half as many total comparisons) in worst-case situations. Like any simple O(n2) sort it can be reasonably fast over very small data sets, though in general insertion sort will be faster.
Distribution sort refers to any sorting algorithm where data is distributed from their input to multiple intermediate structures which are then gathered and placed on the output. For example, both bucket sort and flashsort are distribution-based sorting algorithms. Distribution sorting algorithms can be used on a single processor, or they can be a distributed algorithm, where individual subsets are separately sorted on different processors, then combined. This allows external sorting of data too large to fit into a single computer's memory.
Counting sort is applicable when each input is known to belong to a particular set, S, of possibilities. The algorithm runs in O(|S| + n) time and O(|S|) memory where n is the length of the input. It works by creating an integer array of size |S| and using the ith bin to count the occurrences of the ith member of S in the input. Each input is then counted by incrementing the value of its corresponding bin. Afterward, the counting array is looped through to arrange all of the inputs in order. This sorting algorithm often cannot be used because S needs to be reasonably small for the algorithm to be efficient, but it is extremely fast and demonstrates great asymptotic behavior as n increases. It also can be modified to provide stable behavior.
Bucket sort is a divide-and-conquer sorting algorithm that generalizes counting sort by partitioning an array into a finite number of buckets. Each bucket is then sorted individually, either using a different sorting algorithm or by recursively applying the bucket sorting algorithm.
A bucket sort works best when the elements of the data set are evenly distributed across all buckets.
Radix sort is an algorithm that sorts numbers by processing individual digits. n numbers consisting of k digits each are sorted in O(n · k) time. Radix sort can process digits of each number either starting from the least significant digit (LSD) or starting from the most significant digit (MSD). The LSD algorithm first sorts the list by the least significant digit while preserving their relative order using a stable sort. Then it sorts them by the next digit, and so on from the least significant to the most significant, ending up with a sorted list. While the LSD radix sort requires the use of a stable sort, the MSD radix sort algorithm does not (unless stable sorting is desired). In-place MSD radix sort is not stable. It is common for the counting sort algorithm to be used internally by the radix sort. A hybrid sorting approach, such as using insertion sort for small bins, improves performance of radix sort significantly.
Memory usage patterns and index sorting
When the size of the array to be sorted approaches or exceeds the available primary memory, so that (much slower) disk or swap space must be employed, the memory usage pattern of a sorting algorithm becomes important, and an algorithm that might have been fairly efficient when the array fit easily in RAM may become impractical. In this scenario, the total number of comparisons becomes (relatively) less important, and the number of times sections of memory must be copied or swapped to and from the disk can dominate the performance characteristics of an algorithm. Thus, the number of passes and the localization of comparisons can be more important than the raw number of comparisons, since comparisons of nearby elements to one another happen at system bus speed (or, with caching, even at CPU speed), which, compared to disk speed, is virtually instantaneous.
For example, the popular recursive quicksort algorithm provides quite reasonable performance with adequate RAM, but due to the recursive way that it copies portions of the array it becomes much less practical when the array does not fit in RAM, because it may cause a number of slow copy or move operations to and from disk. In that scenario, another algorithm may be preferable even if it requires more total comparisons.
One way to work around this problem, which works well when complex records (such as in a relational database) are being sorted by a relatively small key field, is to create an index into the array and then sort the index, rather than the entire array. (A sorted version of the entire array can then be produced with one pass, reading from the index, but often even that is unnecessary, as having the sorted index is adequate.) Because the index is much smaller than the entire array, it may fit easily in memory where the entire array would not, effectively eliminating the disk-swapping problem. This procedure is sometimes called "tag sort".[39]
Another technique for overcoming the memory-size problem is using external sorting, for example, one of the ways is to combine two algorithms in a way that takes advantage of the strength of each to improve overall performance. For instance, the array might be subdivided into chunks of a size that will fit in RAM, the contents of each chunk sorted using an efficient algorithm (such as quicksort), and the results merged using a k-way merge similar to that used in merge sort. This is faster than performing either merge sort or quicksort over the entire list.[40][41]
Techniques can also be combined. For sorting very large sets of data that vastly exceed system memory, even the index may need to be sorted using an algorithm or combination of algorithms designed to perform reasonably with virtual memory, i.e., to reduce the amount of swapping required.
Related algorithms
Related problems include approximate sorting (sorting a sequence to within a certain amount of the correct order), partial sorting (sorting only the k smallest elements of a list, or finding the k smallest elements, but unordered) and selection (computing the kth smallest element). These can be solved inefficiently by a total sort, but more efficient algorithms exist, often derived by generalizing a sorting algorithm. The most notable example is quickselect, which is related to quicksort. Conversely, some sorting algorithms can be derived by repeated application of a selection algorithm; quicksort and quickselect can be seen as the same pivoting move, differing only in whether one recurses on both sides (quicksort, divide-and-conquer) or one side (quickselect, decrease-and-conquer).
A kind of opposite of a sorting algorithm is a shuffling algorithm. These are fundamentally different because they require a source of random numbers. Shuffling can also be implemented by a sorting algorithm, namely by a random sort: assigning a random number to each element of the list and then sorting based on the random numbers. This is generally not done in practice, however, and there is a well-known simple and efficient algorithm for shuffling: the Fisher–Yates shuffle.
Sorting algorithms are ineffective for finding an order in many situations. Usually, when elements have no reliable comparison function (crowdsourced preferences like voting systems), comparisons are very costly (sports), or when it would be impossible to pairwise compare all elements for all criteria (search engines). In these cases, the problem is usually referred to as ranking and the goal is to find the "best" result for some criteria according to probabilities inferred from comparisons or rankings. A common example is in chess, where players are ranked with the Elo rating system, and rankings are determined by a tournament system instead of a sorting algorithm.
See also
Collation– Assembly of written information into a standard order
Quantum sort– Sorting algorithms for quantum computers
Related Research Articles
In computer science, heapsort is a comparison-based sorting algorithm which can be thought of as "an implementation of selection sort using the right data structure." Like selection sort, heapsort divides its input into a sorted and an unsorted region, and it iteratively shrinks the unsorted region by extracting the largest element from it and inserting it into the sorted region. Unlike selection sort, heapsort does not waste time with a linear-time scan of the unsorted region; rather, heap sort maintains the unsorted region in a heap data structure to efficiently find the largest element in each step.
In computer science, a heap is a tree-based data structure that satisfies the heap property: In a max heap, for any given node C, if P is the parent node of C, then the key of P is greater than or equal to the key of C. In a min heap, the key of P is less than or equal to the key of C. The node at the "top" of the heap is called the root node.
Insertion sort is a simple sorting algorithm that builds the final sorted array (or list) one item at a time by comparisons. It is much less efficient on large lists than more advanced algorithms such as quicksort, heapsort, or merge sort. However, insertion sort provides several advantages:
In computer science, Merge Sort is an efficient, general-purpose, and comparison-based sorting algorithm. Most implementations produce a stable sort, which means that the relative order of equal elements is the same in the input and output. Merge sort is a divide-and-conquer algorithm that was invented by John von Neumann in 1945. A detailed description and analysis of bottom-up merge sort appeared in a report by Goldstine and von Neumann as early as 1948.
In computer science, radix sort is a non-comparative sorting algorithm. It avoids comparison by creating and distributing elements into buckets according to their radix. For elements with more than one significant digit, this bucketing process is repeated for each digit, while preserving the ordering of the prior step, until all digits have been considered. For this reason, radix sort has also been called bucket sort and digital sort.
In computer science, selection sort is an in-place comparison sorting algorithm. It has a O(n2) time complexity, which makes it inefficient on large lists, and generally performs worse than the similar insertion sort. Selection sort is noted for its simplicity and has performance advantages over more complicated algorithms in certain situations, particularly where auxiliary memory is limited.
A binary heap is a heap data structure that takes the form of a binary tree. Binary heaps are a common way of implementing priority queues. The binary heap was introduced by J. W. J. Williams in 1964 as a data structure for implementing heapsort.
Shellsort, also known as Shell sort or Shell's method, is an in-place comparison sort. It can be seen as either a generalization of sorting by exchange or sorting by insertion. The method starts by sorting pairs of elements far apart from each other, then progressively reducing the gap between elements to be compared. By starting with far-apart elements, it can move some out-of-place elements into the position faster than a simple nearest-neighbor exchange. Donald Shell published the first version of this sort in 1959. The running time of Shellsort is heavily dependent on the gap sequence it uses. For many practical variants, determining their time complexity remains an open problem.
Bucket sort, or bin sort, is a sorting algorithm that works by distributing the elements of an array into a number of buckets. Each bucket is then sorted individually, either using a different sorting algorithm, or by recursively applying the bucket sorting algorithm. It is a distribution sort, a generalization of pigeonhole sort that allows multiple keys per bucket, and is a cousin of radix sort in the most-to-least significant digit flavor. Bucket sort can be implemented with comparisons and therefore can also be considered a comparison sort algorithm. The computational complexity depends on the algorithm used to sort each bucket, the number of buckets to use, and whether the input is uniformly distributed.
In computer science, an in-place algorithm is an algorithm that operates directly on the input data structure without requiring extra space proportional to the input size. In other words, it modifies the input in place, without creating a separate copy of the data structure. An algorithm which is not in-place is sometimes called not-in-place or out-of-place.
Introsort or introspective sort is a hybrid sorting algorithm that provides both fast average performance and (asymptotically) optimal worst-case performance. It begins with quicksort, it switches to heapsort when the recursion depth exceeds a level based on (the logarithm of) the number of elements being sorted and it switches to insertion sort when the number of elements is below some threshold. This combines the good parts of the three algorithms, with practical performance comparable to quicksort on typical data sets and worst-case O(n log n) runtime due to the heap sort. Since the three algorithms it uses are comparison sorts, it is also a comparison sort.
Library sort or gapped insertion sort is a sorting algorithm that uses an insertion sort, but with gaps in the array to accelerate subsequent insertions. The name comes from an analogy:
Suppose a librarian were to store their books alphabetically on a long shelf, starting with the As at the left end, and continuing to the right along the shelf with no spaces between the books until the end of the Zs. If the librarian acquired a new book that belongs to the B section, once they find the correct space in the B section, they will have to move every book over, from the middle of the Bs all the way down to the Zs in order to make room for the new book. This is an insertion sort. However, if they were to leave a space after every letter, as long as there was still space after B, they would only have to move a few books to make room for the new one. This is the basic principle of the Library Sort.
Quicksort is an efficient, general-purpose sorting algorithm. Quicksort was developed by British computer scientist Tony Hoare in 1959 and published in 1961. It is still a commonly used algorithm for sorting. Overall, it is slightly faster than merge sort and heapsort for randomized data, particularly on larger distributions.
Spreadsort is a sorting algorithm invented by Steven J. Ross in 2002. It combines concepts from distribution-based sorts, such as radix sort and bucket sort, with partitioning concepts from comparison sorts such as quicksort and mergesort. In experimental results it was shown to be highly efficient, often outperforming traditional algorithms such as quicksort, particularly on distributions exhibiting structure and string sorting. There is an open-source implementation with performance analysis and benchmarks, and HTML documentation .
An American flag sort is an efficient, in-place variant of radix sort that distributes items into buckets. Non-comparative sorting algorithms such as radix sort and American flag sort are typically used to sort large objects such as strings, for which comparison is not a unit-time operation. American flag sort iterates through the bits of the objects, considering several bits of each object at a time. For each set of bits, American flag sort makes two passes through the array of objects: first to count the number of objects that will fall in each bin, and second to place each object in its bucket. This works especially well when sorting a byte at a time, using 256 buckets. With some optimizations, it is twice as fast as quicksort for large sets of strings.
Flashsort is a distribution sorting algorithm showing linear computational complexity O(n) for uniformly distributed data sets and relatively little additional memory requirement. The original work was published in 1998 by Karl-Dietrich Neubert.
Samplesort is a sorting algorithm that is a divide and conquer algorithm often used in parallel processing systems. Conventional divide and conquer sorting algorithms partitions the array into sub-intervals or buckets. The buckets are then sorted individually and then concatenated together. However, if the array is non-uniformly distributed, the performance of these sorting algorithms can be significantly throttled. Samplesort addresses this issue by selecting a sample of size s from the n-element sequence, and determining the range of the buckets by sorting the sample and choosing p−1 < s elements from the result. These elements then divide the array into p approximately equal-sized buckets. Samplesort is described in the 1970 paper, "Samplesort: A Sampling Approach to Minimal Storage Tree Sorting", by W. D. Frazer and A. C. McKellar.
Timsort is a hybrid, stable sorting algorithm, derived from merge sort and insertion sort, designed to perform well on many kinds of real-world data. It was implemented by Tim Peters in 2002 for use in the Python programming language. The algorithm finds subsequences of the data that are already ordered (runs) and uses them to sort the remainder more efficiently. This is done by merging runs until certain criteria are fulfilled. Timsort has been Python's standard sorting algorithm since version 2.3, and is used to sort arrays of non-primitive type in Java SE 7, on the Android platform, in GNU Octave, on V8, Swift, and inspired the sorting algorithm used in Rust.
Bubble sort, sometimes referred to as sinking sort, is a simple sorting algorithm that repeatedly steps through the input list element by element, comparing the current element with the one after it, swapping their values if needed. These passes through the list are repeated until no swaps have to be performed during a pass, meaning that the list has become fully sorted. The algorithm, which is a comparison sort, is named for the way the larger elements "bubble" up to the top of the list.
In computer science, partial sorting is a relaxed variant of the sorting problem. Total sorting is the problem of returning a list of items such that its elements all appear in order, while partial sorting is returning a list of the k smallest elements in order. The other elements may also be sorted, as in an in-place partial sort, or may be discarded, which is common in streaming partial sorts. A common practical example of partial sorting is computing the "Top 100" of some list.
↑ Franceschini, G. (June 2007). "Sorting Stably, in Place, with O(n log n) Comparisons and O(n) Moves". Theory of Computing Systems. 40 (4): 327–353. doi:10.1007/s00224-006-1311-1.
↑ Thorup, M. (February 2002). "Randomized Sorting in O(n log log n) Time and Linear Space Using Addition, Shift, and Bit-wise Boolean Operations". Journal of Algorithms. 42 (2): 205–230. doi:10.1006/jagm.2002.1211. S2CID9700543.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.