This article's lead sectionmay be too short to adequately summarize the key points. Please consider expanding the lead to provide an accessible overview of all important aspects of the article.(July 2023)
This structure was proposed by Boris Ryabko in 1989[1] with a further modification published in 1992.[2] It has subsequently become known under the name Fenwick tree after Peter Fenwick, who described this structure in his 1994 article.[3]
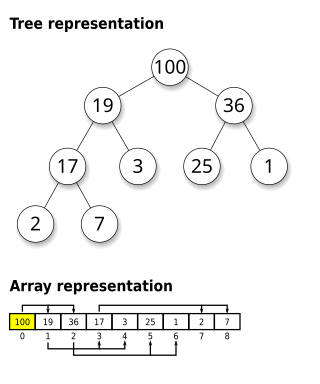
When compared with a flat array of values, the Fenwick tree achieves a much better balance between two operations: value update and prefix sum calculation. A flat array of values can either store the values or the prefix sums. In the first case, computing prefix sums requires linear time; in the second case, updating the array values requires linear time (in both cases, the other operation can be performed in constant time). Fenwick trees allow both operations to be performed in time. This is achieved by representing the values as a tree with nodes where the value of each node in the tree is the prefix sum of the array from the index of the parent (inclusive) up to the index of the node (exclusive). The tree itself is implicit and can be stored as an array of values, with the implicit root node omitted from the array. The tree structure allows the operations of value retrieval, value update, prefix sum, and range sum to be performed using only node accesses.
Given an array of values, it is sometimes desirable to calculate the running total of values up to each index according to some associativebinary operation (addition on integers being by far the most common). Fenwick trees provide a method to query the running total at any index, or prefix sum, in addition to allowing changes to the underlying value array and having all further queries reflect those changes.
Fenwick trees are particularly designed to implement the arithmetic coding algorithm, which maintains counts of each symbol produced and needs to convert those to the cumulative probability of a symbol less than a given symbol. Development of operations it supports were primarily motivated by use in that case.[citation needed]
Description
A Fenwick tree is an implicit tree where nodes are consecutively numbered, and parent-child relationships are determined by arithmetic on the node indexes.
An important function in this index arithmetic is the least significant set bit, also called the find first set operation. This is the greatest power of two which divides an index . This is the power of two (1, 2, 4, 8, ...) and not the exponent (0, 1, 2, 3, ...). It can be efficiently computed in two's complement arithmetic as (where & denotes bitwise AND).
A Fenwick tree is most easily understood using a one-based array with values. Using half-open interval syntax, let the range from (exclusive) to (inclusive). The corresponding Fenwick array stores the range sums. That is, the sum of values ending with and including .
A fictitious node 0 is used in some descriptions, but is never actually accessed and need not be explicitly stored. but the value is never actually needed. may be considered to contain the sum of the empty range with value 0.
A "Fenwick tree" is actually three implicit trees over the same array: the interrogation tree used for translating indexes to prefix sums, the update tree used for updating elements, and the search tree for translating prefix sums to indexes (rank queries).[4] The first two are normally walked upwards, while the third is usually walked downwards.
The interrogation tree
The interrogation tree is defined so that the parent of node is . For example, the parent of 6 = 1102 is 4 = 1002. Implicit node 0 is the root.
Each level of the tree contains nodes with indices corresponding to sums of distinct powers of 2 (with representing an empty sum 0). For example, level contains nodes and level contains nodes
Node has children (), and total descendants. (These numbers include nodes greater than , which are omitted and never accessed.)
The below diagram shows the structure of a 16-node Fenwick tree's interrogation tree, including the root, so it corresponds to a 15-element array A:
Depiction of a 16-node Fenwick interrogation tree containing range sums of a 15-node array A
To find the prefix sum , sum the values in , its parent, its parent's parent, and so on up to (but not including) the root. To compute a range sum , subtract the prefix sums for and . This can be optimized by stopping at their first common ancestor.
The update tree
The update tree is the mirror image of the interrogation tree. The parent of node is (where | denotes bitwise OR). For example, the parent of 6 = 1102 is 8 = 10002.
This conceptual tree is infinite, but only the part with indexes up to is stored or used. Excluding the fictitious nodes with indexes greater than it will be a forest of disjoint trees, one for each bit set in the binary representation of .
Here, a node's ancestors are all nodes whose range sums include its own. For example, holds the sum of , holds the sum of , and so on.
To modify one of the values , add the change to , then 's parent, then its grandparent, and so on, until the index exceeds .
The search tree
Unlike the other two trees, the search tree is a binary tree, arranged in an order Knuth calls a "sideways heap".[5] Each node is assigned a height equal to the number of trailing zeros in the binary representation of its index, with the parent and children being the numerically closest index(es) of the adjacent height. Nodes with odd indexes () are leaves. Nodes with even indexes have the closest two nodes of the next-lowest index as children, . Node 's parent in the search tree is .
For example, the children of 6 = 1102 are 5 = 1012 and 7 = 1112, and its parent is 4 = 1002.
Although this tree is potentially infinite, we may define its root to be the highest existing node, whose index is the greatest power of 2 less than or equal to .
It is possible for a node to have a fictitious parent with an index greater than yet still have an existing grandparent. If the example above applied to a 5-node tree, then node 5 would have a fictitious parent 6, but an existing grandparent 4.
The search tree may be considered a combination of the previous two trees. A node's left subtree contains all of its descendants in the update tree, while its right subtree contains all of its descendants in the interrogation tree. A node's parent in the search tree is either its interrogation or update parent (depending on whether the node is a right or left child, respectively), and the other type of parent may be found by multiple upward steps in the search tree.
However, upward traversals in the search tree are uncommon; its primary use is to perform rank queries: given a prefix sum, at what index does it appear? This is done by a downward traversal through the search tree. During the traversal, three variables are maintained: The current node's index, the rank being sought in the subtree rooted at the current node, and a "fallback index" to be returned if the rank sought is greater than can be found in the subtree.
Initially, the current node is the root, the rank sought is the original query, and the fallback index is a special "overflow" value indicating that the rank is not in the tree. (Depending on the application, or might be used for this purpose.)
Each step, either the current node is a fictitious node (index greater than ), or we must decide if the position sought is to the left or right of the end of the current node. If the rank sought is less than the Fenwick array value for the current node, we must search its left subtree. If it is greater, search its right subtree. If it is equal, the direction chosen depends on how you wish to handle searches for sums lying exactly between two nodes.
These three possibilities are then further divided based on whether the current node is a leaf or not:
If the current node is a leaf and:
the target is in its (empty) left subtree, return the current index.
it is fictitious or the target is in its right subtree, return the fallback index.
If the current node is not a leaf and:
it is fictitious, search for the same rank in its left subtree with an unchanged fallback index.
the target is in its left subtree, search for the same rank in its left subtree with the current index as the fallback index.
the target is in its right subtree, search for the target rank minus the current node's value in the right subtree, with an unchanged fallback index.
Pseudocode
A simple pseudocode implementation of the two main operations on a Fenwick tree—query and update—is as following:
function query(tree, index) is sum := 0 while index > 0 do sum += tree[index] index -= lsb(index) return sum function update(tree, index, value) iswhile index < size(tree) do tree[index] += value index += lsb(index)
The function computes the least significant 1-bit or last set bit of the given or, equivalently, the largest power of two that is also a divisor of . For example, , as shown in its binary representation: . This function can be simply implemented in code through a bitwise AND operation: lsb(n) = n & (-n), assuming a signed integer data type.[3]
Construction
One naive algorithm to construct a Fenwick tree consists of initializing the tree with null values and updating each index individually. This solution works in time, but an construction is possible:[6]
function construct(values) is tree := values for every index, value in tree do parentIndex := index + lsb(index) if parentIndex < size(tree) then tree[parentIndex] += value return tree
In computer science, an AVL tree is a self-balancing binary search tree. In an AVL tree, the heights of the two child subtrees of any node differ by at most one; if at any time they differ by more than one, rebalancing is done to restore this property. Lookup, insertion, and deletion all take O(log n) time in both the average and worst cases, where is the number of nodes in the tree prior to the operation. Insertions and deletions may require the tree to be rebalanced by one or more tree rotations.
In computer science, binary search, also known as half-interval search, logarithmic search, or binary chop, is a search algorithm that finds the position of a target value within a sorted array. Binary search compares the target value to the middle element of the array. If they are not equal, the half in which the target cannot lie is eliminated and the search continues on the remaining half, again taking the middle element to compare to the target value, and repeating this until the target value is found. If the search ends with the remaining half being empty, the target is not in the array.
In computer science, a binary tree is a tree data structure in which each node has at most two children, referred to as the left child and the right child. That is, it is a k-ary tree with k = 2. A recursive definition using set theory is that a binary tree is a tuple (L, S, R), where L and R are binary trees or the empty set and S is a singleton set containing the root.
In computer science, a B-tree is a self-balancing tree data structure that maintains sorted data and allows searches, sequential access, insertions, and deletions in logarithmic time. The B-tree generalizes the binary search tree, allowing for nodes with more than two children. Unlike other self-balancing binary search trees, the B-tree is well suited for storage systems that read and write relatively large blocks of data, such as databases and file systems.
A binary heap is a heap data structure that takes the form of a binary tree. Binary heaps are a common way of implementing priority queues. The binary heap was introduced by J. W. J. Williams in 1964, as a data structure for heapsort.
In computer science, the treap and the randomized binary search tree are two closely related forms of binary search tree data structures that maintain a dynamic set of ordered keys and allow binary searches among the keys. After any sequence of insertions and deletions of keys, the shape of the tree is a random variable with the same probability distribution as a random binary tree; in particular, with high probability its height is proportional to the logarithm of the number of keys, so that each search, insertion, or deletion operation takes logarithmic time to perform.
In computer science, tree traversal is a form of graph traversal and refers to the process of visiting each node in a tree data structure, exactly once. Such traversals are classified by the order in which the nodes are visited. The following algorithms are described for a binary tree, but they may be generalized to other trees as well.
In computing, a persistent data structure or not ephemeral data structure is a data structure that always preserves the previous version of itself when it is modified. Such data structures are effectively immutable, as their operations do not (visibly) update the structure in-place, but instead always yield a new updated structure. The term was introduced in Driscoll, Sarnak, Sleator, and Tarjan's 1986 article.
In computer science, a fusion tree is a type of tree data structure that implements an associative array on w-bit integers on a finite universe, where each of the input integers has size less than 2w and is non-negative. When operating on a collection of n key–value pairs, it uses O(n) space and performs searches in O(logwn) time, which is asymptotically faster than a traditional self-balancing binary search tree, and also better than the van Emde Boas tree for large values of w. It achieves this speed by using certain constant-time operations that can be done on a machine word. Fusion trees were invented in 1990 by Michael Fredman and Dan Willard.
In computer programming, a rope, or cord, is a data structure composed of smaller strings that is used to efficiently store and manipulate longer strings or entire texts. For example, a text editing program may use a rope to represent the text being edited, so that operations such as insertion, deletion, and random access can be done efficiently.
In computer science, a scapegoat tree is a self-balancing binary search tree, invented by Arne Andersson in 1989 and again by Igal Galperin and Ronald L. Rivest in 1993. It provides worst-case lookup time and amortized insertion and deletion time.
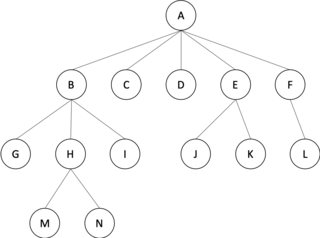
In graph theory, an m-ary tree is an arborescence in which each node has no more than m children. A binary tree is an important case where m = 2; similarly, a ternary tree is one where m = 3.
In computer science, the prefix sum, cumulative sum, inclusive scan, or simply scan of a sequence of numbers x0, x1, x2, ... is a second sequence of numbers y0, y1, y2, ..., the sums of prefixes of the input sequence:
In mathematics, specifically in graph theory and number theory, a hydra game is a single-player iterative mathematical game played on a mathematical tree called a hydra where, usually, the goal is to cut off the hydra's "heads" while the hydra simultaneously expands itself. Hydra games can be used to generate large numbers or infinite ordinals or prove the strength of certain mathematical theories.
The Euler tour technique (ETT), named after Leonhard Euler, is a method in graph theory for representing trees. The tree is viewed as a directed graph that contains two directed edges for each edge in the tree. The tree can then be represented as a Eulerian circuit of the directed graph, known as the Euler tour representation (ETR) of the tree. The ETT allows for efficient, parallel computation of solutions to common problems in algorithmic graph theory. It was introduced by Tarjan and Vishkin in 1984.
In computer science, an x-fast trie is a data structure for storing integers from a bounded domain. It supports exact and predecessor or successor queries in time O(log log M), using O(n log M) space, where n is the number of stored values and M is the maximum value in the domain. The structure was proposed by Dan Willard in 1982, along with the more complicated y-fast trie, as a way to improve the space usage of van Emde Boas trees, while retaining the O(log log M) query time.
In computer science, the range query problem consists of efficiently answering several queries regarding a given interval of elements within an array. For example, a common task, known as range minimum query, is finding the smallest value inside a given range within a list of numbers.
In computer science, the longest common prefix array is an auxiliary data structure to the suffix array. It stores the lengths of the longest common prefixes (LCPs) between all pairs of consecutive suffixes in a sorted suffix array.
In computer science, an optimal binary search tree (Optimal BST), sometimes called a weight-balanced binary tree, is a binary search tree which provides the smallest possible search time (or expected search time) for a given sequence of accesses (or access probabilities). Optimal BSTs are generally divided into two types: static and dynamic.
In computer science, frequent subtree mining is the problem of finding all patterns in a given database whose support is over a given threshold. It is a more general form of the maximum agreement subtree problem.
References
↑ Boris Ryabko (1989). "A fast on-line code"(PDF). Soviet Math. Dokl. 39 (3): 533–537. Archived(PDF) from the original on 2019-07-17. Retrieved 2019-07-17.
↑ Boris Ryabko (1992). "A fast on-line adaptive code"(PDF). IEEE Transactions on Information Theory. 28 (1): 1400–1404. Archived(PDF) from the original on 2019-07-14. Retrieved 2019-07-14.
↑ Marchini, Stefano; Vigna, Sebastiano (14 October 2019). "Compact Fenwick trees for dynamic ranking and selection". arXiv:1904.12370 [cs.DS]. Extensive discussion of practical implementation details.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.