
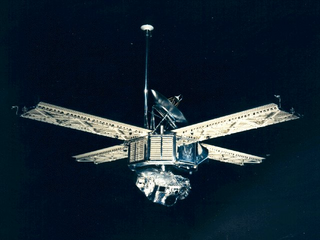
The Mariner program was conducted by the American space agency NASA to explore other planets. Between 1962 and late 1973, NASA's Jet Propulsion Laboratory (JPL) designed and built 10 robotic interplanetary probes named Mariner to explore the inner Solar System – visiting the planets Venus, Mars and Mercury for the first time, and returning to Venus and Mars for additional close observations.

Mariner 9 was a robotic spacecraft that contributed greatly to the exploration of Mars and was part of the NASA Mariner program. Mariner 9 was launched toward Mars on May 30, 1971, from LC-36B at Cape Canaveral Air Force Station, Florida, and reached the planet on November 14 of the same year, becoming the first spacecraft to orbit another planet – only narrowly beating the Soviet probes Mars 2 and Mars 3, which both arrived at Mars only weeks later.

The Viking program consisted of a pair of identical American space probes, Viking 1 and Viking 2, which landed on Mars in 1976. The mission effort began in 1968 and was managed by the NASA Langley Research Center. Each spacecraft was composed of two main parts: an orbiter designed to photograph the surface of Mars from orbit, and a lander designed to study the planet from the surface. The orbiters also served as communication relays for the landers once they touched down.

Mariner 2, an American space probe to Venus, was the first robotic space probe to report successfully from a planetary encounter. The first successful spacecraft in the NASA Mariner program, it was a simplified version of the Block I spacecraft of the Ranger program and an exact copy of Mariner 1. The missions of the Mariner 1 and 2 spacecraft are sometimes known as the Mariner R missions. Original plans called for the probes to be launched on the Atlas-Centaur, but serious developmental problems with that vehicle forced a switch to the much smaller Agena B second stage. As such, the design of the Mariner R vehicles was greatly simplified. Far less instrumentation was carried than on the Soviet Venera probes of this period—for example, forgoing a TV camera—as the Atlas-Agena B had only half as much lift capacity as the Soviet 8K78 booster. The Mariner 2 spacecraft was launched from Cape Canaveral on August 27, 1962, and passed as close as 34,773 kilometers (21,607 mi) to Venus on December 14, 1962.
Mariner 6 and Mariner 7 were two uncrewed NASA robotic spacecraft that completed the first dual mission to Mars in 1969 as part of NASA's wider Mariner program. Mariner 6 was launched from Launch Complex 36B at Cape Canaveral Air Force Station and Mariner 7 from Launch Complex 36A. The two craft flew over the equator and south polar regions, analyzing the atmosphere and the surface with remote sensors, and recording and relaying hundreds of pictures. The mission's goals were to study the surface and atmosphere of Mars during close flybys, in order to establish the basis for future investigations, particularly those relevant to the search for extraterrestrial life, and to demonstrate and develop technologies required for future Mars missions. Mariner 6 also had the objective of providing experience and data which would be useful in programming the Mariner 7 encounter five days later.

Mariner 10 was an American robotic space probe launched by NASA on 3 November 1973, to fly by the planets Mercury and Venus. It was the first spacecraft to perform flybys of multiple planets.

Mariner 5 was a spacecraft of the Mariner program that carried a complement of experiments to probe Venus' atmosphere by radio occultation, measure the hydrogen Lyman-alpha spectrum, and sample the solar particles and magnetic field fluctuations above the planet. Its goals were to measure interplanetary and Venusian magnetic fields, charged particles, plasma, radio refractivity and UV emissions of the Venusian atmosphere.
Mariner-H, also commonly known as Mariner 8, was part of the Mariner Mars '71 project. It was intended to go into Mars orbit and return images and data, but a launch vehicle failure prevented Mariner 8 from achieving Earth orbit and the spacecraft reentered into the Atlantic Ocean shortly after launch.

The Voyager program is an American scientific program that employs two interstellar probes, Voyager 1 and Voyager 2. They were launched in 1977 to take advantage of a favorable alignment of the two gas giants Jupiter and Saturn and the ice giants, Uranus and Neptune, to fly near them while collecting data for transmission back to Earth. After launch, the decision was made to send Voyager 2 near Uranus and Neptune to collect data for transmission back to Earth.

Cassini–Huygens, commonly called Cassini, was a space-research mission by NASA, the European Space Agency (ESA), and the Italian Space Agency (ASI) to send a space probe to study the planet Saturn and its system, including its rings and natural satellites. The Flagship-class robotic spacecraft comprised both NASA's Cassini space probe and ESA's Huygens lander, which landed on Saturn's largest moon, Titan. Cassini was the fourth space probe to visit Saturn and the first to enter its orbit, where it stayed from 2004 to 2017. The two craft took their names from the astronomers Giovanni Cassini and Christiaan Huygens.
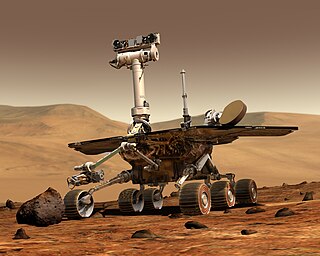
NASA's Mars Exploration Rover (MER) mission was a robotic space mission involving two Mars rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the launch of the two rovers to explore the Martian surface and geology; both landed on Mars at separate locations in January 2004. Both rovers far outlived their planned missions of 90 Martian solar days: MER-A Spirit was active until March 22, 2010, while MER-B Opportunity was active until June 10, 2018.

The planet Mars has been explored remotely by spacecraft. Probes sent from Earth, beginning in the late 20th century, have yielded a large increase in knowledge about the Martian system, focused primarily on understanding its geology and habitability potential. Engineering interplanetary journeys is complicated and the exploration of Mars has experienced a high failure rate, especially the early attempts. Roughly sixty percent of all spacecraft destined for Mars failed before completing their missions, with some failing before their observations could begin. Some missions have been met with unexpected success, such as the twin Mars Exploration Rovers, Spirit and Opportunity, which operated for years beyond their specification.

MESSENGER was a NASA robotic space probe that orbited the planet Mercury between 2011 and 2015, studying Mercury's chemical composition, geology, and magnetic field. The name is a backronym for "Mercury Surface, Space Environment, Geochemistry, and Ranging", and a reference to the messenger god Mercury from Roman mythology.

Mars Science Laboratory (MSL) is a robotic space probe mission to Mars launched by NASA on November 26, 2011, which successfully landed Curiosity, a Mars rover, in Gale Crater on August 6, 2012. The overall objectives include investigating Mars' habitability, studying its climate and geology, and collecting data for a human mission to Mars. The rover carries a variety of scientific instruments designed by an international team.

During the late 19th and early 20th centuries, it was erroneously believed that there were "canals" on the planet Mars. These were a network of long straight lines in the equatorial regions from 60° north to 60° south latitude on Mars, observed by astronomers using early telescopes without photography.

An Earth analog, also called an Earth analogue, Earth twin, or second Earth, is a planet or moon with environmental conditions similar to those found on Earth. The term Earth-like planet is also used, but this term may refer to any terrestrial planet.

Mars Cube One was a Mars flyby mission launched on 5 May 2018 alongside NASA's InSight Mars lander. It consisted of two nanospacecraft, MarCO-A and MarCO-B, that provided real-time communications to Earth for InSight during its entry, descent, and landing (EDL) on 26 November 2018 - when InSight was out of line of sight from the Earth. Both spacecraft were 6U CubeSats designed to test miniaturized communications and navigation technologies. These were the first CubeSats to operate beyond Earth orbit, and aside from telecommunications they also tested CubeSats' endurance in deep space. On 5 February 2019, NASA reported that both the CubeSats had gone silent by 5 January 2019, and are unlikely to be heard from again. In August 2019, the CubeSats were honored for their role in the successful landing of the InSight lander on Mars.

A flyby is a spaceflight operation in which a spacecraft passes in proximity to another body, usually a target of its space exploration mission and/or a source of a gravity assist to impel it towards another target. Spacecraft which are specifically designed for this purpose are known as flyby spacecraft, although the term has also been used in regard to asteroid flybys of Earth for example. Important parameters are the time and distance of closest approach.

















