
An electric motor is a machine that converts electrical energy into mechanical energy. Most electric motors operate through the interaction between the motor's magnetic field and electric current in a wire winding to generate force in the form of torque applied on the motor's shaft. An electric generator is mechanically identical to an electric motor, but operates in reverse, converting mechanical energy into electrical energy.
Contents
- History
- Early motors
- DC motors
- AC motors
- Twenty-first century
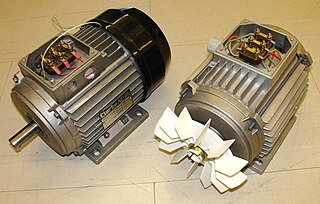
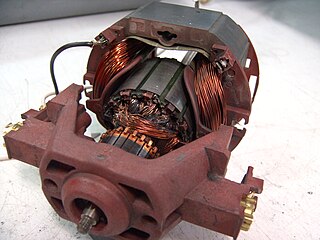
- Components
- Rotor
- Stator
- Gap
- Armature
- Commutator
- Shaft
- Bearings
- Inputs
- Power supply
- Control
- Types
- Self-commutated motor
- Brushed DC motor
- Electronic commutator (EC)
- Universal AC/DC motor
- Externally commutated AC machine
- Induction motor
- Synchronous motor
- Doubly-fed electric machine
- Advanced types
- Rotary
- Linear
- Non-magnetic
- Comparison by major categories
- Operating principles
- Force and torque
- Power
- Back EMF
- Losses
- Efficiency
- Goodness factor
- Performance parameters
- Torque
- Continuous torque density
- Continuous power density
- Acoustic noise and vibrations
- Standards
- See also
- Notes
- References
- Bibliography
- Further reading
- External links
Electric motors can be powered by direct current (DC) sources, such as from batteries or rectifiers, or by alternating current (AC) sources, such as a power grid, inverters or electrical generators.
Electric motors may be classified by considerations such as power source type, construction, application and type of motion output. They can be brushed or brushless, single-phase, two-phase, or three-phase, axial or radial flux, and may be air-cooled or liquid-cooled.
Standardized motors provide power for industrial use. The largest are used for ship propulsion, pipeline compression and pumped-storage applications, with output exceeding 100 megawatts.
Applications include industrial fans, blowers and pumps, machine tools, household appliances, power tools, vehicles, and disk drives. Small motors may be found in electric watches. In certain applications, such as in regenerative braking with traction motors, electric motors can be used in reverse as generators to recover energy that might otherwise be lost as heat and friction.
Electric motors produce linear or rotary force (torque) intended to propel some external mechanism. This makes them a type of actuator. They are generally designed for continuous rotation, or for linear movement over a significant distance compared to its size. Solenoids also convert electrical power to mechanical motion, but over only a limited distance.



















































{kind=link}
{kind=link}