JP4122141B2 - Hybrid vehicle drive control device - Google Patents
Hybrid vehicle drive control device Download PDFInfo
- Publication number
- JP4122141B2 JP4122141B2 JP2001148942A JP2001148942A JP4122141B2 JP 4122141 B2 JP4122141 B2 JP 4122141B2 JP 2001148942 A JP2001148942 A JP 2001148942A JP 2001148942 A JP2001148942 A JP 2001148942A JP 4122141 B2 JP4122141 B2 JP 4122141B2
- Authority
- JP
- Japan
- Prior art keywords
- engine
- electric motor
- internal combustion
- combustion engine
- output torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000002485 combustion reaction Methods 0.000 claims description 49
- 230000005540 biological transmission Effects 0.000 claims description 24
- 230000007423 decrease Effects 0.000 claims description 17
- 238000000034 method Methods 0.000 description 12
- 230000035939 shock Effects 0.000 description 12
- 230000008569 process Effects 0.000 description 11
- 230000003247 decreasing effect Effects 0.000 description 9
- 238000002360 preparation method Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- 239000000446 fuel Substances 0.000 description 6
- 239000010720 hydraulic oil Substances 0.000 description 6
- 230000008859 change Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000004088 simulation Methods 0.000 description 4
- 101100131736 Caenorhabditis elegans mtcu-2 gene Proteins 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- WFDDMRRZEHUPCP-UHFFFAOYSA-N Nc1ccc(Sc2ccc(Sc3ccc(N)cc3)s2)cc1 Chemical compound Nc1ccc(Sc2ccc(Sc3ccc(N)cc3)s2)cc1 WFDDMRRZEHUPCP-UHFFFAOYSA-N 0.000 description 2
- 239000000498 cooling water Substances 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000000994 depressogenic effect Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
【0001】
【発明の属する技術分野】
この発明はハイブリッド車の駆動制御装置に関し、より詳しくは電動モータによる走行時に内燃機関による走行への切り替えが指令されたときのクラッチ締結時のショックを低減するようにしたものに関する。
【0002】
【従来の技術】
内燃機関と、内燃機関の出力軸にクラッチを介して連結される電動モータと、電動モータの出力軸に接続されて内燃機関と電動モータの少なくともいずれかの出力トルクを入力して変速しつつ車輪を駆動する自動変速機を備えたハイブリッド車においては、電動モータによる走行時にアクセルペダルが踏み込まれて運転者から加速意図が示されたときなどに、クラッチを締結して内燃機関による走行へ切り替えられる。
【0003】
しかしながら、その場合、単に内燃機関を始動してクラッチを締結すると、機関出力トルクがモータ出力トルクに加わって車両の駆動トルクが急変して乗員にショックを与える場合がある。
【0004】
そこで、特開2000−23312号公報記載の技術において、内燃機関の始動に備えて第2の電動モータを設けると共に、内燃機関の出力トルクを第2の電動モータに吸収させながら、機関回転数とモータ回転数とを一致させるように制御してショックを低減することが提案されている。
【0005】
より具体的には、この従来技術においては、内燃機関の出力トルクを吸収したときの第2の電動モータの出力トルクを検出すると共に、機関出力トルクを推定し、検出トルクと推定トルクの差に基づいて自動変速機に接続される電動モータの目標トルクを補正するように構成している。
【0006】
【発明が解決しようとする課題】
しかしながら、内燃機関の出力トルクを精度良く推定するのは困難であることから、上記した従来技術においては、必ずしも、十分にショックを低減することができなかった。さらに、クラッチ伝達トルクの挙動も予測し難いことから、上記した従来技術においては、瞬時のトルク変化に対して制御の応答性の点で必ずしも十分ではなかった。
【0007】
従って、この発明の目的は上記した不都合を解消することにあり、内燃機関と、内燃機関の出力軸にクラッチを介して連結される電動モータと、電動モータの出力軸に接続されて内燃機関と電動モータの少なくともいずれかの出力トルクを入力して変速しつつ車輪を駆動する自動変速機を少なくとも備えたハイブリッド車において、電動モータによる走行時に内燃機関による走行へ切り替えられるときのクラッチ締結時のショックを低減するようにしたハイブリッド車の駆動制御装置を提供することにある。
【0008】
【課題を解決するための手段】
上記した目的を解決するために請求項1項にあっては、内燃機関と、前記内燃機関の出力軸に油圧クラッチを介して連結される電動モータと、前記電動モータの出力軸に接続されて前記内燃機関と前記電動モータの少なくともいずれかの出力トルクを入力し、前記入力したトルクを変速して車輪を駆動する自動変速機を備えたハイブリッド車の駆動制御装置において、前記電動モータによる走行時に前記内燃機関による走行への切り替えが指令されたとき、前記内燃機関の始動と前記油圧クラッチへの準備圧供給を開始すると共に、前記電動モータの出力トルクの増加制御を開始する開始制御手段、前記始動された内燃機関の回転数を検出する機関回転数検出手段、前記検出された機関回転数の上昇に同期させて前記油圧クラッチへの供給油圧の増加制御と前記電動モータの出力トルクの増減制御を行う出力増加制御手段、および前記検出された機関回転数が所定回転数に達したとき、前記内燃機関の出力トルクを一時的に減少させながら、前記油圧クラッチへの供給油圧をライン圧まで増加制御する機関出力制御手段を備える如く構成した。
【0009】
このように、内燃機関による走行への切り替えが指令されたとき、内燃機関の始動と油圧クラッチへの準備圧供給を開始すると共に、電動モータの出力トルクの増加制御を開始し、検出された機関回転数の上昇に同期させて油圧クラッチへの供給油圧の増加制御と電動モータの出力トルクの増減制御を行うと共に、検出された機関回転数が所定回転数に達したとき、内燃機関の出力トルクを一時的に減少させながら、油圧クラッチへの供給油圧をライン圧まで増加制御するように構成した。
【0010】
換言すれば、検出された機関回転数の上昇(差回転の減少)に同期させて電動モータ、油圧クラッチおよび内燃機関を協調制御すると共に、機関出力トルクを減少させつつ油圧クラッチを締結するようにしたので、内燃機関の出力トルクを推定することなく、ドライブシャフトトルクの変動を小さくすることができ、それによって油圧クラッチの締結時のショックを低減することができると共に、油圧クラッチの負荷も低減することができる。
【0011】
請求項2項にあっては、前記出力増加制御手段は、前記検出された機関回転数を複数のしきい値と順次比較し、前記検出された機関回転数が前記複数のしきい値を超える度に前記油圧クラッチへの供給油圧を増加制御すると共に、前記電動モータの出力トルクを増減制御する如く構成した。
【0012】
このように、検出された機関回転数を複数のしきい値と順次比較し、検出された機関回転数が複数のしきい値を超えて上昇する度に(換言すれば差回転が相応する複数のしきい値未満に減少する度に)油圧クラッチへの供給油圧を増加制御すると共に、電動モータの出力トルクを増減制御する如く構成した、換言すれば同一のパラメータを共通のしきい値と比較することで電動モータ、油圧クラッチおよび内燃機関を制御するようにしたので、それらを効果的に協調制御することができ、内燃機関の出力トルクを推定することなく、油圧クラッチの締結時のショックを一層効果的に低減することができると共に、油圧クラッチの負荷も一層効果的に低減することができる。
【0013】
【発明の実施の形態】
以下、添付図面に即してこの発明の一つの実施の形態に係るハイブリッド車の駆動制御装置を説明する。
【0014】
図1は、そのハイブリッド車の駆動制御装置を全体的に示す概略図である。
【0015】
図示の如く、この装置は、4気筒火花点火式の内燃機関(「ENG」と示すと共に、以下「エンジン」という)10と、エンジン10の出力軸10aに油圧クラッチ12を介して入力軸14aが連結される電動モータ(「Motor」と示す)14と、電動モータ14の出力軸14bに接続された自動変速機16を備える。
【0016】
エンジン10はOHC直列4気筒からなり、吸気管(図示せず)にインテークマニホルド(図示せず)を介して接続された各気筒の吸気バルブ(図示せず)の付近には、インジェクタ(図示せず)が設けられる。インジェクタから燃料が噴射されると、噴射された燃料は吸気管から吸入された空気と混合され、混合気となって各気筒に流入する。
【0017】
エンジン10は、始動されると、各気筒に流入した混合気を点火させて燃焼させ、ピストン(図示せず)を駆動してクランク軸(図示せず)を回転する。クランク軸の回転は、上記した出力軸10aから取り出される。
【0018】
油圧クラッチ12は、図2に示す如く、複数枚のクラッチディスク12aとクラッチプレート12bが交互に配置された多板式の油圧クラッチからなる。尚、符号12cは油圧チャンバを、符号12dはリターンスプリングを示す。
【0019】
油圧クラッチ12は、作動油(ATF)が導入されて油圧を供給されると、クラッチディスク12aをクラッチプレート12bに押しつけ、よってエンジン10の出力軸10aと電動モータ14の入力軸14aを直結する。
【0020】
電動モータ14はDCブラシレス発電電動機からなり、モータ通電回路18を介してバッテリ(図示せず)に接続され、通電されるとき電動モータとして動作すると共に、通電を停止されるとき、エンジン10に駆動されて発電機(ジェネレータ)として動作してバッテリを充電する。
【0021】
図1に示す如く、自動変速機16は金属ベルト式の無段変速機(CVT)からなると共に、ファイナルギヤ20、デイファレンシャルギヤ22およびドライブシャフト23を介して車輪24に接続される。自動変速機16はエンジン10および電動モータ14の少なくともいずれかの出力トルクを入力し、油圧機構25を介して供給される油圧で設定されるレシオ(変速比)で入力トルクを変速して車輪24を駆動して車両(図示せず)を走行させる。尚、油圧クラッチ12への油圧供給も、油圧機構25を介して行われる。
【0022】
エンジン10の出力軸10aの付近には油圧クラッチ12の上流側において第1の回転数センサ26が設けられ、エンジン10の回転数(クラッチ入力回転数)NEに比例した信号を出力すると共に、電動モータ14の出力軸14bの付近には自動変速機16の接続上流側において第2の回転数センサ28が設けられ、電動モータ14の回転数NM(ミッション入力回転数)に比例した信号を出力する。
【0023】
また、エンジン10のスロットルバルブ(図示せず)の付近にはスロットル開度センサ30が設けられ、スロットル開度THに応じた信号を出力する。さらに、エンジン10の冷却水通路(図示せず)の付近には水温センサ32が設けられ冷却水温TWに応じた信号を出力すると共に、吸気管(図示せず)の適宜位置には外気温センサ34が設けられて外気温TAに比例した信号を出力する。
【0024】
車両の運転席床面のアクセルペダル(図示せず)の付近にはアクセル開度センサ38が配置され、運転者のアクセルペダル踏み込み量APに応じた信号を出力する。尚、アクセルペダルはスロットルバルブと機械的に切り離され、スロットルバルブは図示しないパルスモータなどのアクチュエータを介してアクセルペダル操作と独立に駆動される。
【0025】
また、自動変速機16の油圧機構25の付近には温度センサ40が設けられて作動油(ATF)の温度TATFに比例した信号を出力すると共に、ドライブシャフト23の付近には車速センサ42が設けられ、車両の走行速度(車速)に比例した出力信号を出力する。
【0026】
これらセンサの出力は、コントローラ50に入力される。コントローラ50はマイクロコンピュータからなり、上記したセンサ出力に基づいてエンジン回転数などを検出すると共に、電動モータ14のモータ通電回路18への通電指令値から電動モータ14の出力トルクを算出する。
【0027】
図3は、この実施の形態に係るハイブリッド車の駆動制御装置の動作を示すフロー・チャートである。
【0028】
同図の説明に入る前に、図4などを参照してこの実施の形態に係る装置の動作の背景を説明する。
【0029】
この動作は、車両が電動モータ14によって走行しているときに、アクセルペダルが踏み込まれて運転者による加速意図が示され、エンジン10による走行への切り替えが指令されたときの動作に関する。
【0030】
図4はその切り替え時点におけるトルク伝達を示す説明図である。即ち、同図(a)に示す電動モータ14による走行のとき、電動モータ14の出力トルクが自動変速機16に入力される。次いで、エンジン走行への切り替えが指令されると、同図(b)に示すように電動モータ14でアシストしてエンジン10の始動が開始される。
【0031】
図5は、図4(a)から(d)に示す、モータアシストによるエンジン回転数NE(およびモータ回転数NM)およびドライブシャフトトルクTdsの変化を示すタイム・チャートである。
【0032】
エンジン始動時には、電動モータ14の出力トルクがエンジン10のイナーシャを補完(吸収)するように増加制御されないと、ドライブシャフトトルクTdsは同図に破線で示す如く、低下する。
【0033】
図4の説明に戻ると、同図(c)に示す如く、エンジン10の始動が完了すると、エンジン10の出力トルクと電動モータ14の出力トルクが共に自動変速機16に入力され、次いで、油圧クラッチ12の締結(エンゲージ)が完了すると、同図(d)に示す如く、エンジン10の出力トルクのみが電動モータ14の出力軸を介して自動変速機16に入力される。
【0034】
この油圧クラッチ12の締結が完了したとき、図5に示す如く、電動モータ14のイナーシャ補完トルク分だけドライブシャフトトルクTdsが急変し、前記したように乗員にショックを与えることがある。
【0035】
そこで、この実施の形態に係る装置の動作にあっては、図6タイム・チャートに示す如く、電動モータ14、油圧クラッチ12、およびエンジン10を協調制御するように構成して上記したショックの低減を図ると共に、副次的には出力軸トルクの変動を減少させて油圧クラッチ12の負荷を低減するようにした。
【0036】
以下、図3フロー・チャートを参照し、この実施の形態に係る装置の動作を説明する。
【0037】
先ず、S10において、前記した切り替え指令に応じてエンジン(ENG)10の始動を決定する。即ち、電動モータ14による走行時に、アクセル開度センサ38の出力の時間的な変化量が所定値以上のとき、運転者によって加速意図が示されたとして、図6の上部に示す如く、電動モータ14による走行からエンジン10による走行への切り替え信号(指令)が発せられ、それに応じてエンジン10の始動を決定すると共に、timer0(アップカウンタ)をスタートさせて時間計測を開始する。
【0038】
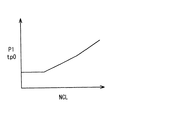
次いでS12に進み、油圧クラッチ12へ準備圧を供給(油圧供給)する。即ち、図6のクラッチ圧指令値に示す如く、油圧クラッチ12に供給される油圧が図示のような特性となるように、図示しない電磁ソレノイドへの通電を開始する。この準備圧供給はいわゆる無効ストローク詰めに相当する油圧供給であり、具体的には図7に示す如く、所定の時間tp0、所定の高さP1となるように電磁ソレノイドへの通電を介して指令する。
【0039】
より具体的には、所定の時間tp0および高さP1は、作動油ATFの粘性に関連したパラメータである、クラッチ回転数(第1の回転数センサ26の出力に基づいて検出される油圧クラッチ12の回転数)NCLあるいは作動油ATFの温度TATFに基づいて図8あるいは図9に示す特性に従い、油圧クラッチ12の応答性を向上させて無効ストローク詰めが最適となるように決定する。
【0040】
次いでS14に進み、timer0の値が所定時間t0を超えるのを待機する。所定時間t0は、エンジンのクランキング特性に応じて適宜設定される無駄時間であり、具体的には図10に示す如く、エンジン10の暖機状態を示す水温TWが上がるにつれて減少するように設定される。尚、水温TWに代え、作動油ATFの温度TATFを用いても良い。
【0041】
S14で所定時間t0の経過が確認されると、電動モータ14のアシストでエンジン10のクランキングが開始したと判断し、S16,S18,S20に進んで電動モータ14、油圧クラッチ12およびエンジン10の制御を行う。
【0042】
尚、説明の簡略化のため、一つのフロー・チャートで示したが、S16からS20までの処理は、実際は別々のルーチンで並行して同時に(同期して)実行される。また、上記以外にも自動変速機16の制御も行われるが、この発明の要旨に直接の関連を有しないため、省略する。
【0043】
図11は、その電動モータ14の制御を示すサブルーチン・フロー・チャートである。
【0044】
以下説明すると、S100において現在のモータトルク相当通電指令値MTをモータトルク指令値MT0とする。モータトルク指令値はモータ通電回路18への通電指令値として算出されるが、このステップの処理は具体的には、その通電指令値から電動モータ14が出力すると推定されるモータトルク相当値を算出し、その値に置き換えることを意味する。
【0045】
次いでS102に進み、差回転dNがしきい値dN2(例えば1000rpm)未満か否か判断する。差回転dNは、モータ回転数(第2の回転数センサ28に基づいて検出される電動モータ14の回転数)NMからエンジン回転数(第1の回転数センサ26に基づいて検出)NEを減じた差を示す回転数であって、この制御においては図6に示す如く、モータ回転数NMは一定となるように制御されることから、差回転dNは、エンジン回転数NEを間接的に示すということができ、従って上記はエンジン回転数NEがしきい値に相応する分を超えて上昇したか否か判断することと等価である。
【0046】
S102で否定されるときはS104に進み、モータトルク指令値MT0に加算項MTCU1を加算して増加補正し、S102に戻って肯定されるまで同様の処理を繰り返す。即ち、図6タイム・チャートに示す如く、dNがdN2未満となる(換言すればエンジン回転数NEがそれに相応する分上昇する)まで、モータ出力トルクを一定の割合で増加させる。
【0047】
S102で肯定されるときはS106に進み、差回転dNが第2のしきい値dN5(例えば50rpm)未満か否か判断し、否定されるときはS108に進み、モータトルク指令値MT0に第2の加算項MTCU2を加算して増加補正し、S106に戻って肯定されるまで同様の処理を繰り返す。
【0048】
従って、図6タイム・チャートに示す如く、dNがdN2未満となった後、dN5未満となる(換言すればエンジン回転数NEがその分だけ上昇する)まで、モータ出力トルクTMを同様に一定の割合で増加させる。尚、第2の加算項MTCU2<加算項MTCU1とし、dN5未満となった後の増加割合は、未満となるまでの増加割合に比較して小さくなるように、モータ出力トルクTMを制御する。これは、dN5未満となった時点でエンジン10のイナーシャを吸収し終わっているからである。
【0049】
S106で肯定されるときはS110に進み、モータトルク指令値MT0が第3のしきい値tm0(図6に示す)を超えるか否か判断し、肯定されるときはS112に進み、モータトルク指令値MT0から減算項MTCD1を減算してモータトルク指令値を減少補正し、S110に戻って否定されるまで同様の処理を繰り返す。
【0050】
減算項MTCD1>>加算項MTCU1(および第2の加算項MTCU2)とし(絶対値において)、これによって、図6タイム・チャートに示す如く、dNがdN5未満となった後、しきい値tm0未満となるまで、モータ出力トルクTMを一定の割合で急減させる。
【0051】
S110で否定されるときはS114に進み、モータトルク指令値MT0が0(図6に示す)以下か否か判断し、肯定されるときは直ちにプログラムを終了すると共に、否定されるときはS116に進み、モータトルク指令値MT0から第2の減算項MTCD2を減算してモータトルク指令値を減少補正し、S114に戻って肯定されるまで同様の処理を繰り返す。
【0052】
加算の場合と同様、第2の減算項MTCD2<<減算項MTCD1とし、しきい値tm0未満となった後は、tm0未満となるまでの減少割合に比較して極めて小さくなるように、換言すれば漸減するようにモータ出力トルクTMを制御する。
【0053】
次いで、クラッチ制御について説明する。
【0054】
図12は、その油圧クラッチ12の制御を示すサブルーチン・フロー・チャートである。尚、油圧クラッチ12は、図3フロー・チャートのS12で説明した処理により、準備圧の供給が完了した状態にある。
【0055】
以下説明すると、S200において、値P0をクラッチ圧指令値(油圧クラッチ12の電磁ソレノイドへの通電量によって定義される指令値)PCLとする。尚、モータトルク指令値と同様に、クラッチ圧指令値も、電磁ソレノイドへの通電指令値として算出される。
【0056】
値P0は、油圧クラッチ12のリターンスプリング12dの初期セット荷重相当の圧力を意味し、具体的には以下のように算出する。
P0=FRTN/APST
上記で、FRTN:リターンスプリング12dの荷重、APST:油圧クラッチ12のピストン面積、である。
【0057】
次いでS202に進み、差回転dNが第4のしきい値dN1(例えば1200rpm)未満か否か判断し、否定されるときはS204に進み、クラッチ圧指令値PCLに加算項CLCU1を加算して増加補正し、S202に戻って肯定されるまで同様の処理を繰り返す。即ち、図6タイム・チャートに示す如く、dNがdN1未満となるまで、クラッチ供給油圧を一定の割合で増加させる。
【0058】
S202で肯定されるときはS206に進み、差回転dNが第5のしきい値dN4(例えば100rpm)未満か否か判断し、肯定されるまでループして待機すると共に、肯定されるときはS208に進み、クラッチ圧指令値PCLに第2の加算項CLCU2を加算して増加補正する。
【0059】
従って、図6タイム・チャートに示す如く、dNがdN1未満となった後、dN4未満となるまでは一定の値に保持すると共に、dNがdN4未満となった後は、クラッチ供給油圧を再び一定の割合で増加させる。尚、第2の加算項CLCU2>加算項CLCU1とし、dN4未満となった後の増加割合は、dN1未満となるまでのそれに比較して大きくなるように、換言すれば急増するようにクラッチ供給油圧を制御する。
【0060】
次いでS210に進み、クラッチ圧指令値PCLがライン圧相当値(図6に示す)以上となったか否か判断し、肯定されるときはプログラムを終了すると共に、否定されるときは、S210で肯定されるまで、S208に戻って同様の処理を繰り返す。
【0061】
このように、この制御においては検出された差回転の減少(エンジン回転数NEの上昇)に同期させて油圧クラッチ12への供給油圧(クラッチ圧指令値)の増加制御と電動モータ14の出力トルク(モータトルク指令値)の増減制御を行う。
【0062】
より具体的には、検出された差回転dN(モータ回転数NMからエンジン回転数NEを減じた差で、モータ回転数NMを一定とするとエンジン回転数を間接的に示す値)を複数のしきい値dNnと順次比較する。
【0063】
そして、検出された差回転がそれらのしきい値未満となる度(換言すればエンジン回転数NEがそれらに相当する分だけ上昇する)度に油圧クラッチ12への供給油圧(クラッチ圧指令値)を増加制御すると共に、電動モータ14の出力トルクTM(モータトルク指令値MT0)を増減制御するようにした。
【0064】
次いで、エンジン制御について説明する。
【0065】
図13は、そのエンジン10の制御を示すサブルーチン・フロー・チャートである。
【0066】
尚、図示は省略するが、エンジン10は油圧クラッチ12に準備圧が供給されて無効ストローク詰めがなされた時点で電動モータ14の回転が伝達されてクランキングされ、始動される。
【0067】
以下説明すると、S300において差回転dNが第6のしきい値dN3(例えば150rpm)未満となるのを待機する。
【0068】
S300でdNがdN3未満となったことが確認されるとS302に進み、点火時期を微小量(微小クランク角度)dQ遅角(リタード)させる。即ち、このエンジン制御はエンジン10の出力トルクを一時的に減少させることを意図しており、その意図から点火時期を遅角させるようにした。このとき、エンジン出力トルクの急変を避けるため、差回転dNがdN3未満となった時点で、図14に示す如く、後述する本来的な遅角量QTRTDに比して微小量dQ遅角する。
【0069】
次いでS304に進み、差回転dNがdN3に近接する、第5のしきい値dN4未満となるのを待機し、dNがdN4未満となったことが確認されるとS306に進み、timer1(アップカウンタ)をスタートさせて時間計測を開始し、S308に進み、点火時期を所定量(所定クランク角度)QTRTDだけ大きく遅角(リタード)させる。
【0070】
次いでS310に進み、timer1の値が所定値(時間)trtd(図14に示す)を超えたか否か判断し、肯定されるまで所定量の遅角を継続する。これにより、エンジン10の出力トルクを大きく減少させる。尚、遅角量dQ,QTRTDおよび時間trtdは、意図するエンジン出力の低減量に応じた値とする。また、時間trtdに代え、クランク角度を用いても良い。
【0071】
そしてS310で肯定されるときはS312に進み、点火時期を遅角量QTRTDに相当する量だけ進角方向に戻し、S314に進み、同様に点火時期を微少量dQだけ進角方向に戻してプログラムを終わる。
【0072】
図6を参照して上記を説明すると、このように検出された差回転dN(エンジン回転数NEを間接的に示す値)がしきい値dN3(所定回転数)未満となったとき、エンジン出力トルクTEの減少を開始し、それに続くしきい値dN4未満となったとき、エンジン出力トルクTEを大きく減少させながら、油圧クラッチ12への供給油圧をライン圧(ライン圧相当値)まで増加制御する。
【0073】
このように、この制御においては、検出された差回転の減少(エンジン回転数NEの上昇)に同期させて電動モータ14、油圧クラッチ12およびエンジン10を協調制御するようにした。
【0074】
即ち、同一のパラメータ(差回転dN)を共通のしきい値dNn(dN1,2,3,4,5)と比較することで、電動モータ14、油圧クラッチ12およびエンジン10の制御の内容を切り替えるようにした。
【0075】
図6タイム・チャートを参照して説明すると、dNがdN2未満となるまで、エンジン10の始動に伴うイナーシャを吸収すべく、モータ出力トルクを単調に増加させる一方、dNがdN2付近に設定されたdN1未満となるまで、クラッチ供給油圧を急増させる。
【0076】
次いで、dNがdN2未満となった後はエンジンイナーシャの吸収が完了したとみなし、dN5未満となるまで、モータ出力トルクTMをより少ない増加率で同様に単調に増加させると共に、dNがモータ回転数NMに接近する、dN3未満となった時点でエンジン10の点火時期を微少量遅角させ、dN4未満となった時点で本来的な所定量分遅角させてエンジン出力トルクTEを大きく減少させると共に、クラッチ供給油圧をライン圧相当値まで急増させ、油圧クラッチ12を完全に締結させる。
【0077】
同時に、クラッチ締結でモータ出力トルクは不要となることから、零付近の値tm0まで急減させ、次いで零まで漸減させると共に、遅角も不要となることから、進角させる。
【0078】
このように構成したので、図6タイム・チャートに示す如く、モータ出力トルクTMの特性を滑らかにすることができ、ドライブシャフトトルクTdsの変動を小さくすることができる。それによって、エンジン10の出力トルクTEを推定することなく、油圧クラッチ12の締結時のショックを低減することができると共に、油圧クラッチ12の負荷も低減することができる。
【0079】
図15は、この実施の形態に係るハイブリッド車の駆動制御装置の制御(動作)についてのシミュレーション結果を示すタイム・チャートであり、図16はかかる制御を行わない場合についてのシミュレーション結果を示すタイム・チャートである。
【0080】
図15と図16の対比から明らかな如く、図16の場合にあってはドライブシャフトトルクTdsの変動量が100kgfm程度であったのに対し、この実施の形態に係る装置にあっては5kgfm程度に減少した。
【0081】
また、図16で見られたクラッチ伝達トルクおよびモータ出力トルクTMの落ち込みが図15では生じていない。
【0082】
上記の如く、この実施の形態は、内燃機関(エンジン10)と、前記内燃機関の出力軸10aに油圧クラッチ12を介して連結される電動モータ14と、前記電動モータの出力軸14bに接続されて前記内燃機関と前記電動モータの少なくともいずれかの出力トルクTE,TMを入力し、前記入力したトルクを変速して車輪24を駆動する自動変速機(CVT)16を備えたハイブリッド車の駆動制御装置(コントローラ50)において、前記電動モータによる走行時に前記内燃機関による走行への切り替えが指令されたとき、前記内燃機関の始動と前記油圧クラッチへの準備圧供給を開始すると共に(S10,S12)、前記電動モータの出力トルクの増加制御を開始する開始制御手段(S16,S100からS108)、前記始動された内燃機関の回転数(エンジン回転数NE。より具体的には電動モータ回転数NMからエンジン回転数NEを減算した差である回転数dN)を検出する機関回転数検出手段(第1、第2の回転数センサ26,28)、前記検出された機関回転数の上昇に同期させて前記油圧クラッチへの供給油圧の増加制御と前記電動モータの出力トルクの増減制御を行う出力増加制御手段(S16,S18,S100からS116,S200からS210)、および前記検出された機関回転数が所定回転数(dN4)に達したとき、前記内燃機関の出力トルクを一時的に減少させながら、前記油圧クラッチへの供給油圧をライン圧まで増加制御する機関出力制御手段(S18,S20,S304からS314,S206からS210)を備える如く構成した。
【0083】
また、前記出力増加制御手段は、前記検出された機関回転数を複数のしきい値(dNn)と順次比較し、前記検出された機関回転数が前記複数のしきい値を超えて上昇する(換言すれば差回転が相応する複数のしきい値未満に低下する)度に前記油圧クラッチへの供給油圧を増加制御すると共に、前記電動モータの出力トルクを増減制御する(S16,S100からS116)ように構成した。
【0084】
尚、上記において、点火時期を遅角させてエンジンの出力トルクを減少させたが、燃料供給停止(フューエルカット(FC))を介してエンジンの出力トルクを減少させても良く、両者を併用しても良い。
【0085】
また、上記において、自動変速機としてCVTを用いたが、有段変速機であっても良い。また、電動モータもDCモータに限られるものではなく、ACモータであっても良い。
【0086】
【発明の効果】
請求項1項にあっては、内燃機関による走行への切り替えが指令されたとき、内燃機関の始動と油圧クラッチへの準備圧供給を開始すると共に、電動モータの出力トルクの増加制御を開始し、検出された機関回転数の上昇に同期させて油圧クラッチへの供給油圧の増加制御と電動モータの出力トルクの増減制御を行うと共に、検出された機関回転数が所定回転数に達したとき、内燃機関の出力トルクを一時的に減少させながら、油圧クラッチへの供給油圧をライン圧まで増加制御するように構成した。
【0087】
換言すれば、検出された機関回転数の上昇に同期させて電動モータ、油圧クラッチおよび内燃機関を協調制御すると共に、機関出力トルクを減少させつつ油圧クラッチを締結するようにしたので、内燃機関の出力トルクを推定することなく、ドライブシャフトトルクの変動を小さくすることができ、それによって油圧クラッチの締結時のショックを低減することができると共に、油圧クラッチの負荷も低減することができる。
【0088】
請求項2項にあっては、検出された機関回転数を複数のしきい値と順次比較し、検出された機関回転数が複数のしきい値を超える度に油圧クラッチへの供給油圧を増加制御すると共に、電動モータの出力トルクを増減制御する如く構成した、換言すれば同一のパラメータを共通のしきい値と比較することで電動モータ、油圧クラッチおよびエンジン10を制御するようにしたので、それらを効果的に協調制御することができ、内燃機関の出力トルクを推定することなく、油圧クラッチの締結時のショックを一層効果的に低減することができると共に、油圧クラッチの負荷も一層効果的に低減することができる。
【図面の簡単な説明】
【図1】この発明の実施の形態に係るハイブリッド車の駆動制御装置を全体的に示す概略図である。
【図2】図1装置の油圧クラッチの構造を詳細に示す説明斜視図である。
【図3】図1装置の動作を示すフロー・チャートである。
【図4】図1装置において電動モータによる走行から内燃機関による走行に切り替える時点におけるトルク伝達を示す説明図である。
【図5】図4のトルク伝達の際の機関回転数およびドライブシャフトトルクなどの変化を示すタイム・チャートである。
【図6】図1装置の動作を全体的に示すタイム・チャートである。
【図7】図3フロー・チャートのクラッチ準備圧の特性を示すタイム・チャートである。
【図8】図7に示すクラッチ準備圧の特性の中の準備圧保持時間tp0などのクラッチ回転数NCLに対する特性を示す説明グラフである。
【図9】図7に示すクラッチ準備圧の特性の中の準備圧保持時間tp0などの作動油温度TATFに対する特性を示す説明グラフである。
【図10】図3フロー・チャートの所定時間(無駄時間)の特性を示す説明グラフである。
【図11】図3フロー・チャートのモータ制御のサブルーチン・フロー・チャートである。
【図12】図3フロー・チャートのクラッチ制御のサブルーチン・フロー・チャートである。
【図13】図3フロー・チャートのエンジン制御のサブルーチン・フロー・チャートである。
【図14】図13フロー・チャートの点火時期の遅角量を示す説明グラフである。
【図15】図1装置の動作(制御)についてのシミュレーション結果を示すタイム・チャートである。
【図16】図1装置の動作(制御)を行わない場合のシミュレーション結果を示すタイム・チャートである。
【符号の説明】
10 内燃機関(エンジン)
12 油圧クラッチ
14 電動モータ
16 自動変速機(CVT)
18 モータ通電回路
26 第1の回転数センサ
28 第2の回転数センサ
50 コントローラ[0001]
BACKGROUND OF THE INVENTION
The present invention relates to a drive control device for a hybrid vehicle, and more particularly to a device for reducing a shock at the time of clutch engagement when a command to switch to running by an internal combustion engine is issued during running by an electric motor.
[0002]
[Prior art]
An internal combustion engine, an electric motor connected to the output shaft of the internal combustion engine via a clutch, and a wheel connected to the output shaft of the electric motor and input at least one of the output torque of the internal combustion engine and the electric motor for shifting In a hybrid vehicle equipped with an automatic transmission that drives the vehicle, when the accelerator pedal is depressed during travel by an electric motor and the driver indicates an intention to accelerate, the clutch is engaged to switch to travel by an internal combustion engine. .
[0003]
However, in that case, if the internal combustion engine is simply started and the clutch is engaged, the engine output torque is added to the motor output torque, and the vehicle drive torque changes suddenly, which may shock the passenger.
[0004]
Therefore, in the technique described in Japanese Patent Application Laid-Open No. 2000-23312, a second electric motor is provided in preparation for the start of the internal combustion engine, and the output torque of the internal combustion engine is absorbed by the second electric motor, It has been proposed to reduce the shock by controlling the motor rotation speed to coincide.
[0005]
More specifically, in this prior art, the output torque of the second electric motor when the output torque of the internal combustion engine is absorbed is detected, the engine output torque is estimated, and the difference between the detected torque and the estimated torque is calculated. Based on this, the target torque of the electric motor connected to the automatic transmission is corrected.
[0006]
[Problems to be solved by the invention]
However, since it is difficult to accurately estimate the output torque of the internal combustion engine, the above-described prior art cannot always reduce the shock sufficiently. Furthermore, since it is difficult to predict the behavior of the clutch transmission torque, the above-described prior art is not always sufficient in terms of control response to an instantaneous torque change.
[0007]
Accordingly, an object of the present invention is to eliminate the inconveniences described above, an internal combustion engine, an electric motor connected to the output shaft of the internal combustion engine via a clutch, an internal combustion engine connected to the output shaft of the electric motor, Shock at the time of clutch engagement in a hybrid vehicle having at least an automatic transmission that drives wheels while shifting by inputting at least one output torque of the electric motor when switching to traveling by an internal combustion engine during traveling by the electric motor It is an object of the present invention to provide a drive control device for a hybrid vehicle that can reduce the above.
[0008]
[Means for Solving the Problems]
In order to solve the above-described object, in
[0009]
In this way, when switching to running by the internal combustion engine is commanded, the start of the internal combustion engine and the supply of the preparatory pressure to the hydraulic clutch are started, and the increase control of the output torque of the electric motor is started, and the detected engine In synchronism with the increase in the rotational speed, the increase control of the hydraulic pressure supplied to the hydraulic clutch and the increase / decrease control of the output torque of the electric motor are performed, and when the detected engine speed reaches a predetermined speed, the output torque of the internal combustion engine The hydraulic pressure supplied to the hydraulic clutch is controlled to increase up to the line pressure while the pressure is temporarily reduced.
[0010]
In other words, the electric motor, the hydraulic clutch, and the internal combustion engine are controlled in coordination with the detected increase in engine speed (decrease in differential rotation), and the hydraulic clutch is engaged while the engine output torque is reduced. Therefore, it is possible to reduce the fluctuation of the drive shaft torque without estimating the output torque of the internal combustion engine, thereby reducing the shock when the hydraulic clutch is engaged and reducing the load of the hydraulic clutch. be able to.
[0011]
The output increase control means sequentially compares the detected engine speed with a plurality of threshold values, and the detected engine speed exceeds the plurality of threshold values. Each time the hydraulic pressure supplied to the hydraulic clutch is increased and controlled, the output torque of the electric motor is increased or decreased.
[0012]
In this way, the detected engine speed is sequentially compared with a plurality of threshold values, and each time the detected engine speed rises above the plurality of threshold values (in other words, a plurality of differential speeds corresponding to each other). It is configured to increase the hydraulic pressure supplied to the hydraulic clutch and to increase / decrease the output torque of the electric motor (in other words, the same parameter is compared with the common threshold). As a result, the electric motor, the hydraulic clutch and the internal combustion engine are controlled so that they can be effectively coordinated, and the shock at the time of engagement of the hydraulic clutch can be achieved without estimating the output torque of the internal combustion engine. In addition to being able to reduce more effectively, the load on the hydraulic clutch can also be reduced more effectively.
[0013]
DETAILED DESCRIPTION OF THE INVENTION
A hybrid vehicle drive control apparatus according to an embodiment of the present invention will be described below with reference to the accompanying drawings.
[0014]
FIG. 1 is a schematic diagram showing the overall drive control apparatus for the hybrid vehicle.
[0015]
As shown in the figure, this apparatus includes a four-cylinder spark ignition type internal combustion engine (hereinafter referred to as “ENG” and hereinafter referred to as “engine”) 10, and an
[0016]
The
[0017]
When the
[0018]
As shown in FIG. 2, the hydraulic clutch 12 is a multi-plate hydraulic clutch in which a plurality of
[0019]
When hydraulic oil (ATF) is introduced and hydraulic pressure is supplied, the hydraulic clutch 12 presses the
[0020]
The
[0021]
As shown in FIG. 1, the
[0022]
A first
[0023]
A
[0024]
An
[0025]
A
[0026]
The outputs of these sensors are input to the
[0027]
FIG. 3 is a flowchart showing the operation of the hybrid vehicle drive control apparatus according to this embodiment.
[0028]
Prior to the description of the figure, the background of the operation of the apparatus according to this embodiment will be described with reference to FIG.
[0029]
This operation relates to an operation when the accelerator pedal is depressed to indicate the driver's intention to accelerate and the
[0030]
FIG. 4 is an explanatory diagram showing torque transmission at the time of switching. That is, when traveling by the
[0031]
FIG. 5 is a time chart showing changes in the engine speed NE (and the motor speed NM) and the drive shaft torque Tds due to the motor assist shown in FIGS. 4 (a) to 4 (d).
[0032]
When the engine is started, if the output torque of the
[0033]
Returning to the description of FIG. 4, as shown in FIG. 4C, when the start of the
[0034]
When the engagement of the hydraulic clutch 12 is completed, as shown in FIG. 5, the drive shaft torque Tds changes suddenly by the amount of the inertia supplement torque of the
[0035]
Therefore, in the operation of the apparatus according to this embodiment, as shown in the time chart of FIG. 6, the
[0036]
The operation of the apparatus according to this embodiment will be described below with reference to the flowchart of FIG.
[0037]
First, in S10, the start of the engine (ENG) 10 is determined according to the switching command described above. That is, when the
[0038]
Next, the process proceeds to S12, where the preparation pressure is supplied to the hydraulic clutch 12 (hydraulic supply). That is, as shown in the clutch pressure command value of FIG. 6, energization to an electromagnetic solenoid (not shown) is started so that the hydraulic pressure supplied to the hydraulic clutch 12 has characteristics as shown. This preparatory pressure supply is a hydraulic pressure supply corresponding to so-called invalid stroke filling. Specifically, as shown in FIG. 7, a command is given through energization to the electromagnetic solenoid so that a predetermined time tp0 and a predetermined height P1 are obtained. To do.
[0039]
More specifically, the predetermined time tp0 and the height P1 are parameters related to the viscosity of the hydraulic oil ATF, and are the clutch rotational speed (the hydraulic clutch 12 detected based on the output of the first rotational speed sensor 26). The number of revolutions) is determined based on the temperature TATF of the NCL or hydraulic oil ATF according to the characteristics shown in FIG. 8 or FIG. 9 so as to improve the response of the hydraulic clutch 12 and optimize the invalid stroke filling.
[0040]
Next, the process proceeds to S14 and waits for the value of timer0 to exceed the predetermined time t0. The predetermined time t0 is a dead time that is appropriately set according to the cranking characteristics of the engine. Specifically, as shown in FIG. 10, the predetermined time t0 is set to decrease as the water temperature TW indicating the warm-up state of the
[0041]
When the elapse of the predetermined time t0 is confirmed in S14, it is determined that the cranking of the
[0042]
For simplification of explanation, although shown in one flow chart, the processing from S16 to S20 is actually executed simultaneously (synchronously) in parallel in separate routines. In addition to the above, control of the
[0043]
FIG. 11 is a subroutine flowchart showing the control of the
[0044]
In the following, in S100, the current motor torque equivalent energization command value MT is set as the motor torque command value MT0. The motor torque command value is calculated as an energization command value for the
[0045]
Next, in S102, it is determined whether or not the differential rotation dN is less than a threshold value dN2 (for example, 1000 rpm). The differential rotation dN is obtained by subtracting the engine rotation speed (detected based on the first rotation speed sensor 26) NE from the motor rotation speed (rotation speed of the
[0046]
When the result in S102 is negative, the program proceeds to S104 where the addition term MTCU1 is added to the motor torque command value MT0 to increase the correction, and the same processing is repeated until the result returns to S102 and affirmed. That is, as shown in the time chart of FIG. 6, the motor output torque is increased at a constant rate until dN becomes less than dN2 (in other words, the engine speed NE increases correspondingly).
[0047]
When the result in S102 is affirmative, the program proceeds to S106, in which it is determined whether or not the differential rotation dN is less than a second threshold value dN5 (for example, 50 rpm), and when the result is negative, the program proceeds to S108 and the motor torque command value MT0 is set to the second value. The addition term MTCU2 is added to increase the correction, and the process returns to S106 and the same processing is repeated until affirmative.
[0048]
Therefore, as shown in the time chart of FIG. 6, the motor output torque TM is kept constant until dN becomes less than dN2 and then becomes less than dN5 (in other words, the engine speed NE increases by that amount). Increase in proportion. Note that the second addition term MTCU2 <the addition term MTCU1 is set, and the motor output torque TM is controlled so that the increase rate after becoming less than dN5 is smaller than the increase rate until becoming less than dN5. This is because the inertia of the
[0049]
When the result in S106 is affirmative, the program proceeds to S110, in which it is determined whether or not the motor torque command value MT0 exceeds the third threshold value tm0 (shown in FIG. 6). The subtraction term MTCD1 is subtracted from the value MT0 to reduce the motor torque command value, and the same processing is repeated until the result returns to S110 and negated.
[0050]
Subtract term MTCD1 >> addition term MTCU1 (and second addition term MTCU2) (in absolute value), thereby reducing dN below dN5 and below threshold tm0 as shown in the time chart of FIG. The motor output torque TM is rapidly decreased at a constant rate until
[0051]
When the result in S110 is negative, the program proceeds to S114, where it is determined whether or not the motor torque command value MT0 is 0 (shown in FIG. 6). When the result is affirmative, the program is immediately terminated. Then, the second subtraction term MTCD2 is subtracted from the motor torque command value MT0 to reduce the motor torque command value, and the same processing is repeated until the determination returns to S114.
[0052]
As in the case of addition, the second subtraction term MTCD2 << subtraction term MTCD1 is set, and after being less than the threshold value tm0, in other words, it becomes extremely small compared to the reduction rate until it becomes less than tm0. If so, the motor output torque TM is controlled so as to gradually decrease.
[0053]
Next, clutch control will be described.
[0054]
FIG. 12 is a subroutine flow chart showing the control of the
[0055]
In the following description, in S200, the value P0 is defined as a clutch pressure command value (command value defined by the energization amount to the electromagnetic solenoid of the hydraulic clutch 12) PCL. Similar to the motor torque command value, the clutch pressure command value is also calculated as an energization command value for the electromagnetic solenoid.
[0056]
The value P0 means a pressure corresponding to the initial set load of the
P0 = FRTN / APST
In the above, FRTN: load of the
[0057]
Next, the routine proceeds to S202, where it is determined whether or not the differential rotation dN is less than a fourth threshold value dN1 (eg, 1200 rpm). If the determination is negative, the routine proceeds to S204 where the addition term CLCU1 is added to the clutch pressure command value PCL to increase. The same process is repeated until it is corrected and the process returns to S202 and affirmed. That is, as shown in the time chart of FIG. 6, the clutch supply hydraulic pressure is increased at a constant rate until dN becomes less than dN1.
[0058]
When the result in S202 is affirmative, the routine proceeds to S206, where it is determined whether or not the differential rotation dN is less than a fifth threshold value dN4 (for example, 100 rpm). Then, the second addition term CLCU2 is added to the clutch pressure command value PCL to correct the increase.
[0059]
Therefore, as shown in the time chart of FIG. 6, after dN becomes less than dN1, it is held at a constant value until it becomes less than dN4, and after dN becomes less than dN4, the clutch supply hydraulic pressure becomes constant again. Increase at a rate of. Note that the second supply term CLCU2> the addition term CLCU1, and the rate of increase after being less than dN4 is larger than that until it becomes less than dN1, in other words, the clutch supply hydraulic pressure increases rapidly. To control.
[0060]
Next, the routine proceeds to S210, where it is determined whether or not the clutch pressure command value PCL has become equal to or greater than the line pressure equivalent value (shown in FIG. 6). Until it is done, the process returns to S208 and the same processing is repeated.
[0061]
As described above, in this control, the increase control of the hydraulic pressure supplied to the hydraulic clutch 12 (clutch pressure command value) and the output torque of the
[0062]
More specifically, a plurality of detected differential rotations dN (a value obtained by subtracting the engine rotation speed NE from the motor rotation speed NM and indirectly indicating the engine rotation speed when the motor rotation speed NM is constant) are plural. A comparison is sequentially made with the threshold value dNn.
[0063]
The hydraulic pressure supplied to the hydraulic clutch 12 (clutch pressure command value) every time the detected differential rotation becomes less than the threshold value (in other words, the engine speed NE increases by an amount corresponding thereto). The output torque TM (motor torque command value MT0) of the
[0064]
Next, engine control will be described.
[0065]
FIG. 13 is a subroutine flow chart showing the control of the
[0066]
Although not shown, the
[0067]
In the following, in S300, the process waits until the differential rotation dN becomes less than the sixth threshold value dN3 (for example, 150 rpm).
[0068]
When it is confirmed at S300 that dN is less than dN3, the routine proceeds to S302, where the ignition timing is retarded by a minute amount (minute crank angle) and dQ retarded (retarded). In other words, this engine control is intended to temporarily reduce the output torque of the
[0069]
Next, the process proceeds to S304, waits for the differential rotation dN to be close to dN3 and less than the fifth threshold value dN4, and if it is confirmed that dN is less than dN4, the process proceeds to S306 and timer1 (up counter ) Is started to start time measurement, and the process proceeds to S308, where the ignition timing is retarded (retarded) by a predetermined amount (predetermined crank angle) QTRTD.
[0070]
Next, in S310, it is determined whether or not the value of timer1 exceeds a predetermined value (time) trtd (shown in FIG. 14), and a predetermined amount of retardation is continued until affirmative. Thereby, the output torque of the
[0071]
When the result in S310 is affirmative, the program proceeds to S312 and the ignition timing is returned to the advance direction by an amount corresponding to the retard amount QTRTD, and the program proceeds to S314 and the ignition timing is similarly returned to the advance direction by a small amount dQ. End.
[0072]
The above description will be made with reference to FIG. 6. When the detected differential rotation dN (a value indirectly indicating the engine rotational speed NE) becomes less than the threshold value dN3 (predetermined rotational speed), the engine output When the torque TE starts to decrease and becomes less than the subsequent threshold value dN4, the hydraulic pressure supplied to the hydraulic clutch 12 is increased to the line pressure (line pressure equivalent value) while greatly reducing the engine output torque TE. .
[0073]
As described above, in this control, the
[0074]
That is, the contents of control of the
[0075]
Referring to the time chart of FIG. 6, until dN becomes less than dN2, the motor output torque is monotonously increased in order to absorb the inertia accompanying the start of the
[0076]
Next, after dN becomes less than dN2, it is considered that the absorption of the engine inertia has been completed, and the motor output torque TM is similarly monotonously increased at a smaller increase rate until dN becomes less than dN5. When the NM approaches less than dN3, the ignition timing of the
[0077]
At the same time, since the motor output torque is not required when the clutch is engaged, the motor output torque is rapidly decreased to a value near tm0, then gradually decreased to zero, and the delay angle is also unnecessary.
[0078]
With this configuration, as shown in the time chart of FIG. 6, the characteristics of the motor output torque TM can be made smooth, and fluctuations in the drive shaft torque Tds can be reduced. Accordingly, it is possible to reduce the shock at the time of engaging the hydraulic clutch 12 without estimating the output torque TE of the
[0079]
FIG. 15 is a time chart showing a simulation result of the control (operation) of the hybrid vehicle drive control apparatus according to this embodiment, and FIG. 16 is a time chart showing the simulation result when such control is not performed. It is a chart.
[0080]
As is clear from the comparison between FIG. 15 and FIG. 16, in the case of FIG. 16, the fluctuation amount of the drive shaft torque Tds was about 100 kgfm, whereas in the apparatus according to this embodiment, about 5 kgfm. Decreased.
[0081]
Further, the drop in clutch transmission torque and motor output torque TM seen in FIG. 16 does not occur in FIG.
[0082]
As described above, this embodiment is connected to the internal combustion engine (engine 10), the
[0083]
The output increase control means sequentially compares the detected engine speed with a plurality of threshold values (dNn), and the detected engine speed increases exceeding the plurality of threshold values ( In other words, each time the differential rotation decreases below a corresponding threshold value, the supply hydraulic pressure to the hydraulic clutch is increased and the output torque of the electric motor is increased / decreased (S16, S100 to S116). It was configured as follows.
[0084]
In the above, the ignition timing is retarded to reduce the engine output torque. However, the engine output torque may be reduced by stopping the fuel supply (fuel cut (FC)). May be.
[0085]
In the above description, the CVT is used as the automatic transmission. However, a stepped transmission may be used. The electric motor is not limited to the DC motor, and may be an AC motor.
[0086]
【The invention's effect】
According to the first aspect of the present invention, when switching to running by the internal combustion engine is instructed, the start of the internal combustion engine and the supply of the preparatory pressure to the hydraulic clutch are started, and the increase control of the output torque of the electric motor is started. In addition, in synchronization with the detected increase in the engine speed, the increase control of the hydraulic pressure supplied to the hydraulic clutch and the increase / decrease control of the output torque of the electric motor are performed, and when the detected engine speed reaches a predetermined speed, The engine is configured to increase the hydraulic pressure supplied to the hydraulic clutch to the line pressure while temporarily reducing the output torque of the internal combustion engine.
[0087]
In other words, the electric motor, the hydraulic clutch and the internal combustion engine are coordinated in synchronization with the detected increase in engine speed, and the hydraulic clutch is engaged while reducing the engine output torque. Without estimating the output torque, it is possible to reduce the fluctuation of the drive shaft torque, thereby reducing the shock at the time of engagement of the hydraulic clutch and reducing the load of the hydraulic clutch.
[0088]
According to
[Brief description of the drawings]
FIG. 1 is a schematic diagram showing an overall drive control apparatus for a hybrid vehicle according to an embodiment of the present invention.
2 is an explanatory perspective view showing in detail the structure of the hydraulic clutch of the apparatus of FIG. 1. FIG.
FIG. 3 is a flowchart showing the operation of the apparatus of FIG. 1;
4 is an explanatory diagram showing torque transmission at the time of switching from running by an electric motor to running by an internal combustion engine in the apparatus of FIG. 1. FIG.
5 is a time chart showing changes in engine speed, drive shaft torque, and the like during torque transmission in FIG. 4;
6 is a time chart showing the overall operation of the apparatus of FIG.
7 is a time chart showing the characteristics of clutch preparation pressure in the flow chart of FIG. 3. FIG.
8 is an explanatory graph showing characteristics with respect to the clutch rotational speed NCL, such as the preparation pressure holding time tp0, among the characteristics of the clutch preparation pressure shown in FIG. 7;
9 is an explanatory graph showing characteristics with respect to the hydraulic oil temperature TATF such as the preparation pressure holding time tp0 in the characteristics of the clutch preparation pressure shown in FIG. 7;
FIG. 10 is an explanatory graph showing characteristics of a predetermined time (dead time) in the flowchart of FIG. 3;
FIG. 11 is a subroutine flowchart of motor control in the flowchart of FIG. 3;
12 is a subroutine flowchart of clutch control in the flowchart of FIG. 3;
FIG. 13 is a subroutine flowchart of engine control in the flowchart of FIG. 3;
FIG. 14 is an explanatory graph showing a retard amount of the ignition timing in the flowchart of FIG. 13;
15 is a time chart showing simulation results for the operation (control) of the apparatus of FIG. 1. FIG.
16 is a time chart showing a simulation result when the operation (control) of the apparatus of FIG. 1 is not performed. FIG.
[Explanation of symbols]
10 Internal combustion engine
12 Hydraulic clutch
14 Electric motor
16 Automatic transmission (CVT)
18 Motor energization circuit
26 First rotational speed sensor
28 Second rotational speed sensor
50 controller
Claims (2)
a.前記電動モータによる走行時に前記内燃機関による走行への切り替えが指令されたとき、前記内燃機関の始動と前記油圧クラッチへの準備圧供給を開始すると共に、前記電動モータの出力トルクの増加制御を開始する開始制御手段、
b.前記始動された内燃機関の回転数を検出する機関回転数検出手段、
c.前記検出された機関回転数の上昇に同期させて前記油圧クラッチへの供給油圧の増加制御と前記電動モータの出力トルクの増減制御を行う出力増加制御手段、
および
d.前記検出された機関回転数が所定回転数に達したとき、前記内燃機関の出力トルクを一時的に減少させながら、前記油圧クラッチへの供給油圧をライン圧まで増加制御する機関出力制御手段、
を備えたことを特徴とするハイブリッド車の駆動制御装置。An internal combustion engine; an electric motor coupled to the output shaft of the internal combustion engine via a hydraulic clutch; and an output torque of at least one of the internal combustion engine and the electric motor connected to the output shaft of the electric motor. In the drive control device for a hybrid vehicle provided with an automatic transmission that drives the wheels by shifting the input torque,
a. When switching to running by the internal combustion engine is commanded during running by the electric motor, start of the internal combustion engine and supply of preparatory pressure to the hydraulic clutch are started, and increase control of output torque of the electric motor is started. Starting control means to
b. Engine speed detecting means for detecting the speed of the started internal combustion engine;
c. Output increase control means for performing increase control of the hydraulic pressure supplied to the hydraulic clutch and increase / decrease control of the output torque of the electric motor in synchronization with the detected increase in the engine speed;
And d. An engine output control means for increasing the hydraulic pressure supplied to the hydraulic clutch to a line pressure while temporarily reducing the output torque of the internal combustion engine when the detected engine speed reaches a predetermined speed;
A drive control apparatus for a hybrid vehicle, comprising:
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001148942A JP4122141B2 (en) | 2001-05-18 | 2001-05-18 | Hybrid vehicle drive control device |
| US10/143,941 US6823954B2 (en) | 2001-05-18 | 2002-05-14 | Control system for hybrid vehicle |
| DE10221844.7A DE10221844B4 (en) | 2001-05-18 | 2002-05-16 | Control system for a hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001148942A JP4122141B2 (en) | 2001-05-18 | 2001-05-18 | Hybrid vehicle drive control device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002349309A JP2002349309A (en) | 2002-12-04 |
| JP4122141B2 true JP4122141B2 (en) | 2008-07-23 |
Family
ID=18994177
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001148942A Expired - Fee Related JP4122141B2 (en) | 2001-05-18 | 2001-05-18 | Hybrid vehicle drive control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4122141B2 (en) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006123642A (en) * | 2004-10-27 | 2006-05-18 | Aisin Aw Co Ltd | Driving device for hybrid vehicle, its control method and controller |
| US7370715B2 (en) * | 2004-12-28 | 2008-05-13 | Ford Global Technologies, Llc | Vehicle and method for controlling engine start in a vehicle |
| JP5311610B2 (en) | 2007-12-27 | 2013-10-09 | 現代自動車株式会社 | Hybrid vehicle driving force control device |
| JP4941360B2 (en) * | 2008-03-03 | 2012-05-30 | 日産自動車株式会社 | Engine start control device for hybrid vehicle |
| WO2009109831A1 (en) * | 2008-03-03 | 2009-09-11 | Nissan Motor Co., Ltd. | Engine start control system for hybrid vehicle |
| JP5510702B2 (en) * | 2009-07-07 | 2014-06-04 | アイシン・エィ・ダブリュ株式会社 | Hybrid drive device |
| CN102612610B (en) | 2009-10-14 | 2015-04-08 | 日产自动车株式会社 | Vehicle control device |
| JP5418850B2 (en) * | 2010-09-29 | 2014-02-19 | アイシン・エィ・ダブリュ株式会社 | Control device |
| CN103442958B (en) | 2011-03-30 | 2016-03-23 | 丰田自动车株式会社 | The control system of vehicle |
| JPWO2013094409A1 (en) * | 2011-12-19 | 2015-04-27 | ボッシュ株式会社 | Control device and control method for hybrid vehicle |
| JP2014054886A (en) * | 2012-09-11 | 2014-03-27 | Toyota Motor Corp | Vehicle control device |
| KR101491262B1 (en) | 2013-06-11 | 2015-02-06 | 현대자동차주식회사 | Method for conrolling clutch of hybrid electric vehicle |
| KR101491325B1 (en) | 2013-10-08 | 2015-02-06 | 현대자동차주식회사 | Method of controlling fail safe for hybrid vehicle |
| KR101509999B1 (en) | 2013-12-04 | 2015-04-07 | 현대자동차주식회사 | Method for predicting and compensating load torque of hybrid vehicle |
| CN108749643B (en) * | 2018-04-17 | 2023-06-13 | 江西精骏电控技术有限公司 | Electric automobile starting torque direction detection device and detection method thereof |
| JP7200729B2 (en) * | 2019-02-14 | 2023-01-10 | トヨタ自動車株式会社 | In-vehicle control device |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3870505B2 (en) * | 1997-08-29 | 2007-01-17 | アイシン・エィ・ダブリュ株式会社 | Hybrid drive device for vehicle |
| JP3458795B2 (en) * | 1999-10-08 | 2003-10-20 | トヨタ自動車株式会社 | Hybrid drive |
-
2001
- 2001-05-18 JP JP2001148942A patent/JP4122141B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002349309A (en) | 2002-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4122141B2 (en) | Hybrid vehicle drive control device | |
| US6823954B2 (en) | Control system for hybrid vehicle | |
| US9187076B2 (en) | Methods and systems for assisted direct start control | |
| JP3817516B2 (en) | Drive control apparatus for hybrid vehicle | |
| EP1837223B1 (en) | Hybrid vehicle control | |
| JP4122142B2 (en) | Hybrid vehicle drive control device | |
| KR20060092116A (en) | Power control unit | |
| US20150151763A1 (en) | Method for operating a vehicle powertrain | |
| EP1329622B1 (en) | Measurement of engine cylinder induction air quantity | |
| JP2004263647A (en) | Start controller of vehicle | |
| JP4799654B2 (en) | Power generation control device for internal combustion engine | |
| US9358981B2 (en) | Methods and system for improving launching of a hybrid vehicle | |
| JP3678095B2 (en) | Control device for internal combustion engine | |
| JP5829838B2 (en) | Engine brake control device | |
| US20160325731A1 (en) | Hybrid vehicle | |
| EP1659285A2 (en) | Vehicle engine starting system | |
| JP3914122B2 (en) | Ignition timing control device for internal combustion engine | |
| JP5566429B2 (en) | Control device for internal combustion engine | |
| JP2871270B2 (en) | Slope estimation method | |
| JP6595091B2 (en) | Vehicle control device | |
| JP2010014061A (en) | Control device for vehicle | |
| JP3562412B2 (en) | Hybrid vehicle output control device | |
| JP3797120B2 (en) | Operation control device for internal combustion engine | |
| JP2006161561A (en) | Fuel injection control device for internal combustion engine | |
| JP6877935B2 (en) | Engine control unit |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080415 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080501 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110509 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4122141 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110509 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130509 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130509 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140509 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |