
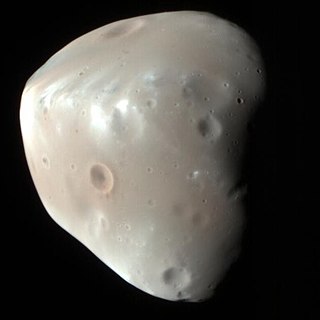
Phobos is the innermost and larger of the two natural satellites of Mars, the other being Deimos. The two moons were discovered in 1877 by American astronomer Asaph Hall. It is named after Phobos, the Greek god of fear and panic, who is the son of Ares (Mars) and twin brother of Deimos.
Deimos is the smaller and outer of the two natural satellites of Mars, the other being Phobos. Deimos has a mean radius of 6.2 km (3.9 mi) and takes 30.3 hours to orbit Mars. Deimos is 23,460 km (14,580 mi) from Mars, much farther than Mars's other moon, Phobos. It is named after Deimos, the Ancient Greek god and personification of dread and terror.

A lander is a spacecraft that descends towards, then comes to rest on the surface of an astronomical body other than Earth. In contrast to an impact probe, which makes a hard landing that damages or destroys the probe upon reaching the surface, a lander makes a soft landing after which the probe remains functional.

The planet Mars has been explored remotely by spacecraft. Probes sent from Earth, beginning in the late 20th century, have yielded a large increase in knowledge about the Martian system, focused primarily on understanding its geology and habitability potential. Engineering interplanetary journeys is complicated and the exploration of Mars has experienced a high failure rate, especially the early attempts. Roughly sixty percent of all spacecraft destined for Mars failed before completing their missions, with some failing before their observations could begin. Some missions have been met with unexpected success, such as the twin Mars Exploration Rovers, Spirit and Opportunity, which operated for years beyond their specification.

The Discovery Program is a series of Solar System exploration missions funded by the U.S. National Aeronautics and Space Administration (NASA) through its Planetary Missions Program Office. The cost of each mission is capped at a lower level than missions from NASA's New Frontiers or Flagship Programs. As a result, Discovery missions tend to be more focused on a specific scientific goal rather than serving a general purpose.
The two moons of Mars are Phobos and Deimos. They are irregular in shape. Both were discovered by American astronomer Asaph Hall in August 1877 and are named after the Greek mythological twin characters Phobos and Deimos who accompanied their father Ares into battle.

The colonization of Mars is the proposed process of establishing and maintaining control of Martian land for exploitation and the possible settlement of Mars. Most colonization concepts focus on settling, but colonization is a broader ethical concept, which international space law has limited, and national space programs have avoided, instead focusing on human mission to Mars for exploring the planet. Currently there are only proposals for Mars colonization and humans have not set foot on Mars yet.

Many astronomical phenomena viewed from the planet Mars are the same as or similar to those seen from Earth; but some are quite different. For example, because the atmosphere of Mars does not contain an ozone layer, it is also possible to make UV observations from the surface of Mars.

The NASA Innovative Advanced Concepts (NIAC) is a NASA program for development of far reaching, long term advanced concepts by "creating breakthroughs, radically better or entirely new aerospace concepts". The program operated under the name NASA Institute for Advanced Concepts from 1998 until 2007, and was reestablished in 2011 under the name NASA Innovative Advanced Concepts and continues to the present. The NIAC program funds work on revolutionary aeronautics and space concepts that can dramatically impact how NASA develops and conducts its missions.
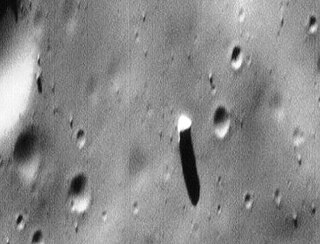
The Phobos monolith is a large rock on the surface of Mars' moon Phobos. It is a boulder, about 85 m (279 ft) across and 90 m (300 ft) tall. A monolith is a geological feature consisting of a single massive piece of rock. Monoliths also occur naturally on Earth, but it has been suggested that the Phobos monolith may be a piece of impact ejecta. The monolith is a bright object near Stickney crater, described as a "building sized" boulder, which casts a prominent shadow. It was discovered by Efrain Palermo, who did extensive surveys of Martian probe imagery, and later confirmed by Lan Fleming, an imaging sub-contractor at NASA Johnson Space Center.

The Asteroid Redirect Mission (ARM), also known as the Asteroid Retrieval and Utilization (ARU) mission and the Asteroid Initiative, was a space mission proposed by NASA in 2013; the mission was later cancelled. The Asteroid Retrieval Robotic Mission (ARRM) spacecraft would rendezvous with a large near-Earth asteroid and use robotic arms with anchoring grippers to retrieve a 4-meter boulder from the asteroid.

Phobos And Deimos & Mars Environment (PADME) is a low-cost NASA Mars orbiter mission concept that would address longstanding unknowns about Mars' two moons Phobos and Deimos and their environment.
Phootprint is a proposed sample-return mission to the Mars moon Phobos by the European Space Agency (ESA), proposed to be launched in 2024.

Mars Base Camp (MBC) is a crewed Mars laboratory orbiter concept under study that was commissioned by NASA from Lockheed Martin in US. It would use both future and proven concepts as well as the Orion MPCV, also built by Lockheed Martin.
The following outline is provided as an overview of and topical guide to Mars:

Martian Moons eXploration (MMX) is a robotic space probe set for launch in 2026 to bring back the first samples from Mars' largest moon Phobos. Developed by the Japan Aerospace Exploration Agency (JAXA) and announced on 9 June 2015, MMX will land and collect samples from Phobos once or twice, along with conducting Deimos flyby observations and monitoring Mars's climate.
Deimos and Phobos Interior Explorer (DePhine) is a European mission concept to use a dedicated orbiter to explore the two moons of Mars: Phobos and Deimos. The mission concept was proposed in 2016 to the European Space Agency's Cosmic Vision programme for launch in 2030, but it was not chosen as a finalist for the M5 mission class.


