
Bipedalism is a form of terrestrial locomotion where a tetrapod moves by means of its two rear limbs or legs. An animal or machine that usually moves in a bipedal manner is known as a biped, meaning 'two feet'. Types of bipedal movement include walking or running and hopping.

Gait is the pattern of movement of the limbs of animals, including humans, during locomotion over a solid substrate. Most animals use a variety of gaits, selecting gait based on speed, terrain, the need to maneuver, and energetic efficiency. Different animal species may use different gaits due to differences in anatomy that prevent use of certain gaits, or simply due to evolved innate preferences as a result of habitat differences. While various gaits are given specific names, the complexity of biological systems and interacting with the environment make these distinctions "fuzzy" at best. Gaits are typically classified according to footfall patterns, but recent studies often prefer definitions based on mechanics. The term typically does not refer to limb-based propulsion through fluid mediums such as water or air, but rather to propulsion across a solid substrate by generating reactive forces against it.

Standard anatomical terms of location are used to unambiguously describe the anatomy of animals, including humans. The terms, typically derived from Latin or Greek roots, describe something in its standard anatomical position. This position provides a definition of what is at the front ("anterior"), behind ("posterior") and so on. As part of defining and describing terms, the body is described through the use of anatomical planes and anatomical axes.

Kangaroo rats, small mostly nocturnal rodents of genus Dipodomys, are native to arid areas of western North America. The common name derives from their bipedal form. They hop in a manner similar to the much larger kangaroo, but developed this mode of locomotion independently, like several other clades of rodents.

In biology, dactyly is the arrangement of digits on the hands, feet, or sometimes wings of a tetrapod animal. It comes from the Greek word δακτυλος = "finger".

Theropoda, whose members are known as theropods, is a dinosaur clade that is characterized by hollow bones and three toes and claws on each limb. Theropods are generally classed as a group of saurischian dinosaurs. They were ancestrally carnivorous, although a number of theropod groups evolved to become herbivores and omnivores. Theropods first appeared during the Carnian age of the late Triassic period 231.4 million years ago (Ma) and included the majority of large terrestrial carnivores from the Early Jurassic until at least the close of the Cretaceous, about 66 Ma. In the Jurassic, birds evolved from small specialized coelurosaurian theropods, and are today represented by about 10,500 living species.

Ichthyostega is an extinct genus of limbed tetrapodomorphs from the Late Devonian of what is now Greenland. It was among the earliest four-limbed vertebrates ever in the fossil record and was one of the first with weight-bearing adaptations for terrestrial locomotion. Ichthyostega possessed lungs and limbs that helped it navigate through shallow water in swamps. Although Ichthyostega is often labelled a 'tetrapod' because of its limbs and fingers, it evolved long before true crown group tetrapods and could more accurately be referred to as a stegocephalian or stem tetrapod. Likewise, while undoubtedly of amphibian build and habit, it is not a true member of the group in the narrow sense, as the first modern amphibians appeared in the Triassic Period. Until finds of other early stegocephalians and closely related fishes in the late 20th century, Ichthyostega stood alone as a transitional fossil between fish and tetrapods, combining fish and tetrapod features. Newer research has shown that it had an unusual anatomy, functioning more akin to a seal than a salamander, as previously assumed.

Animal locomotion, in ethology, is any of a variety of methods that animals use to move from one place to another. Some modes of locomotion are (initially) self-propelled, e.g., running, swimming, jumping, flying, hopping, soaring and gliding. There are also many animal species that depend on their environment for transportation, a type of mobility called passive locomotion, e.g., sailing, kiting (spiders), rolling or riding other animals (phoresis).
A forelimb or front limb is one of the paired articulated appendages (limbs) attached on the cranial (anterior) end of a terrestrial tetrapod vertebrate's torso. With reference to quadrupeds, the term foreleg or front leg is often used instead. In bipedal animals with an upright posture, the term upper limb is often used.

The patagium is a membranous body part that assists an animal in obtaining lift when gliding or flying. The structure is found in extant and extinct groups of flying and gliding animals including bats, birds, some dromaeosaurs, pterosaurs, gliding mammals, some flying lizards, and flying frogs. The patagium that stretches between an animal's hind limbs is called the uropatagium or the interfemoral membrane.

A cursorial organism is one that is adapted specifically to run. An animal can be considered cursorial if it has the ability to run fast or if it can keep a constant speed for a long distance. "Cursorial" is often used to categorize a certain locomotor mode, which is helpful for biologists who examine behaviors of different animals and the way they move in their environment. Cursorial adaptations can be identified by morphological characteristics, physiological characteristics, maximum speed, and how often running is used in life. There is much debate over how to define a cursorial animal specifically. The most accepted definitions include that a cursorial organism could be considered adapted to long-distance running at high speeds or has the ability to accelerate quickly over short distances. Among vertebrates, animals under 1 kg of mass are rarely considered cursorial, and cursorial behaviors and morphology are thought to only occur at relatively large body masses in mammals. There are a few mammals that have been termed "micro-cursors" that are less than 1 kg in mass and have the ability to run faster than other small animals of similar sizes.

Euparkeria is an extinct genus of archosauriform reptile from the Triassic of South Africa. Euparkeria is close to the ancestry of Archosauria, the reptile group that includes crocodilians, pterosaurs, and dinosaurs.

Altirhinus is a genus of hadrosauroid ornithopod dinosaur from the Early Cretaceous period of Mongolia.

Terrestrial locomotion has evolved as animals adapted from aquatic to terrestrial environments. Locomotion on land raises different problems than that in water, with reduced friction being replaced by the increased effects of gravity.
A facultative biped is an animal that is capable of walking or running on two legs (bipedal), as a response to exceptional circumstances (facultative), while normally walking or running on four limbs or more. In contrast, obligate bipedalism is where walking or running on two legs is the primary method of locomotion. Facultative bipedalism has been observed in several families of lizards and multiple species of primates, including sifakas, capuchin monkeys, baboons, gibbons, gorillas, bonobos and chimpanzees. Several dinosaur and other prehistoric archosaur species are facultative bipeds, most notably ornithopods and marginocephalians, with some recorded examples within sauropodomorpha. Different facultatively bipedal species employ different types of bipedalism corresponding to the varying reasons they have for engaging in facultative bipedalism. In primates, bipedalism is often associated with food gathering and transport. In lizards, it has been debated whether bipedal locomotion is an advantage for speed and energy conservation or whether it is governed solely by the mechanics of the acceleration and lizard's center of mass. Facultative bipedalism is often divided into high-speed (lizards) and low-speed (gibbons), but some species cannot be easily categorized into one of these two. Facultative bipedalism has also been observed in cockroaches and some desert rodents.
The limb bud is a structure formed early in vertebrate limb development. As a result of interactions between the ectoderm and underlying mesoderm, formation occurs roughly around the fourth week of development. In the development of the human embryo the upper limb bud appears in the third week and the lower limb bud appears four days later.
A limb is a jointed, muscled appendage of a tetrapod vertebrate animal used for weight-bearing, terrestrial locomotion and physical interaction with other objects. The distalmost portion of a limb is known as its extremity. The limbs' bony endoskeleton, known as the appendicular skeleton, is homologous among all tetrapods, who use their limbs for walking, running and jumping, swimming, climbing, grasping, touching and striking.

A leg is a weight-bearing and locomotive anatomical structure, usually having a columnar shape. During locomotion, legs function as "extensible struts". The combination of movements at all joints can be modeled as a single, linear element capable of changing length and rotating about an omnidirectional "hip" joint.
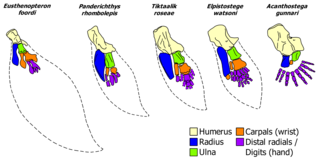
Polydactyly in stem-tetrapods should here be understood as having more than five digits to the finger or foot, a condition that was the natural state of affairs in the earliest stegocephalians during the evolution of terrestriality. The polydactyly in these largely aquatic animals is not to be confused with polydactyly in the medical sense, i.e. it was not an anomaly in the sense it was not a congenital condition of having more than the typical number of digits for a given taxon. Rather, it appears to be a result of the early evolution from a limb with a fin rather than digits.

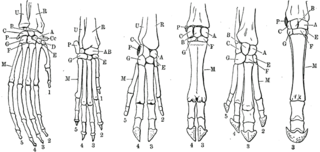
Comparative foot morphology involves comparing the form of distal limb structures of a variety of terrestrial vertebrates. Understanding the role that the foot plays for each type of organism must take account of the differences in body type, foot shape, arrangement of structures, loading conditions and other variables. However, similarities also exist among the feet of many different terrestrial vertebrates. The paw of the dog, the hoof of the horse, the manus (forefoot) and pes (hindfoot) of the elephant, and the foot of the human all share some common features of structure, organization and function. Their foot structures function as the load-transmission platform which is essential to balance, standing and types of locomotion.