Formal definition
In terms of DTIME,
In computational complexity theory, the complexity class EXPTIME (sometimes called EXP or DEXPTIME) is the set of all decision problems that are solvable by a deterministic Turing machine in exponential time, i.e., in O(2p(n)) time, where p(n) is a polynomial function of n.
EXPTIME is one intuitive class in an exponential hierarchy of complexity classes with increasingly more complex oracles or quantifier alternations. For example, the class 2-EXPTIME is defined similarly to EXPTIME but with a doubly exponential time bound. This can be generalized to higher and higher time bounds.
EXPTIME can also be reformulated as the space class APSPACE, the set of all problems that can be solved by an alternating Turing machine in polynomial space.
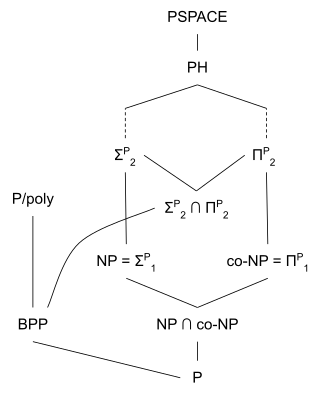
EXPTIME relates to the other basic time and space complexity classes in the following way: P ⊆ NP ⊆ PSPACE ⊆ EXPTIME ⊆ NEXPTIME ⊆ EXPSPACE. Furthermore, by the time hierarchy theorem and the space hierarchy theorem, it is known that P ⊊ EXPTIME, NP ⊊ NEXPTIME and PSPACE ⊊ EXPSPACE.
In terms of DTIME,
It is known that
and also, by the time hierarchy theorem and the space hierarchy theorem, that
In the above expressions, the symbol ⊆ means "is a subset of", and the symbol ⊊ means "is a strict subset of".
so at least one of the first three inclusions and at least one of the last three inclusions must be proper, but it is not known which ones are. It is also known that if P = NP, then EXPTIME = NEXPTIME, the class of problems solvable in exponential time by a nondeterministic Turing machine. [1] More precisely, E ≠ NE if and only if there exist sparse languages in NP that are not in P. [2]
EXPTIME can be reformulated as the space class APSPACE, the set of all problems that can be solved by an alternating Turing machine in polynomial space. This is one way to see that PSPACE ⊆ EXPTIME, since an alternating Turing machine is at least as powerful as a deterministic Turing machine. [3]
A decision problem is EXPTIME-complete if it is in EXPTIME and every problem in EXPTIME has a polynomial-time many-one reduction to it. In other words, there is a polynomial-time algorithm that transforms instances of one to instances of the other with the same answer. Problems that are EXPTIME-complete might be thought of as the hardest problems in EXPTIME. Notice that although it is unknown whether NP is equal to P, we do know that EXPTIME-complete problems are not in P; it has been proven that these problems cannot be solved in polynomial time, by the time hierarchy theorem.
In computability theory, one of the basic undecidable problems is the halting problem: deciding whether a deterministic Turing machine (DTM) halts. One of the most fundamental EXPTIME-complete problems is a simpler version of this, which asks if a DTM halts on a given input in at most k steps. It is in EXPTIME because a trivial simulation requires O(k) time, and the input k is encoded using O(log k) bits which causes exponential number of simulations. It is EXPTIME-complete because, roughly speaking, we can use it to determine if a machine solving an EXPTIME problem accepts in an exponential number of steps; it will not use more. [4] The same problem with the number of steps written in unary is P-complete.
Other examples of EXPTIME-complete problems include the problem of evaluating a position in generalized chess, [5] checkers, [6] or Go (with Japanese ko rules). [7] These games have a chance of being EXPTIME-complete because games can last for a number of moves that is exponential in the size of the board. In the Go example, the Japanese ko rule is known to imply EXPTIME-completeness, but it is not known if the American or Chinese rules for the game are EXPTIME-complete (they could range from PSPACE to EXPSPACE).
By contrast, generalized games that can last for a number of moves that is polynomial in the size of the board are often PSPACE-complete. The same is true of exponentially long games in which non-repetition is automatic.
Another set of important EXPTIME-complete problems relates to succinct circuits. Succinct circuits are simple machines used to describe some graphs in exponentially less space. They accept two vertex numbers as input and output whether there is an edge between them. For many natural P-complete graph problems, where the graph is expressed in a natural representation such as an adjacency matrix, solving the same problem on a succinct circuit representation is EXPTIME-complete, because the input is exponentially smaller; but this requires nontrivial proof, since succinct circuits can only describe a subclass of graphs. [8]
In computational complexity theory, a branch of computer science, bounded-error probabilistic polynomial time (BPP) is the class of decision problems solvable by a probabilistic Turing machine in polynomial time with an error probability bounded by 1/3 for all instances. BPP is one of the largest practical classes of problems, meaning most problems of interest in BPP have efficient probabilistic algorithms that can be run quickly on real modern machines. BPP also contains P, the class of problems solvable in polynomial time with a deterministic machine, since a deterministic machine is a special case of a probabilistic machine.
In theoretical computer science and mathematics, computational complexity theory focuses on classifying computational problems according to their resource usage, and explores the relationships between these classifications. A computational problem is a task solved by a computer. A computation problem is solvable by mechanical application of mathematical steps, such as an algorithm.

In computational complexity theory, NP is a complexity class used to classify decision problems. NP is the set of decision problems for which the problem instances, where the answer is "yes", have proofs verifiable in polynomial time by a deterministic Turing machine, or alternatively the set of problems that can be solved in polynomial time by a nondeterministic Turing machine.
In computational complexity theory, PSPACE is the set of all decision problems that can be solved by a Turing machine using a polynomial amount of space.
In computational complexity theory, a decision problem is PSPACE-complete if it can be solved using an amount of memory that is polynomial in the input length and if every other problem that can be solved in polynomial space can be transformed to it in polynomial time. The problems that are PSPACE-complete can be thought of as the hardest problems in PSPACE, the class of decision problems solvable in polynomial space, because a solution to any one such problem could easily be used to solve any other problem in PSPACE.
In computational complexity theory, EXPSPACE is the set of all decision problems solvable by a deterministic Turing machine in exponential space, i.e., in space, where is a polynomial function of . Some authors restrict to be a linear function, but most authors instead call the resulting class ESPACE. If we use a nondeterministic machine instead, we get the class NEXPSPACE, which is equal to EXPSPACE by Savitch's theorem.
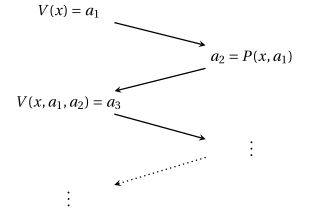
In computational complexity theory, an interactive proof system is an abstract machine that models computation as the exchange of messages between two parties: a prover and a verifier. The parties interact by exchanging messages in order to ascertain whether a given string belongs to a language or not. The prover possesses unlimited computational resources but cannot be trusted, while the verifier has bounded computation power but is assumed to be always honest. Messages are sent between the verifier and prover until the verifier has an answer to the problem and has "convinced" itself that it is correct.
In computational complexity theory, the time hierarchy theorems are important statements about time-bounded computation on Turing machines. Informally, these theorems say that given more time, a Turing machine can solve more problems. For example, there are problems that can be solved with n2 time but not n time, where n is the input length.

In computational complexity theory, a complexity class is a set of computational problems "of related resource-based complexity". The two most commonly analyzed resources are time and memory.
In computational complexity theory, Savitch's theorem, proved by Walter Savitch in 1970, gives a relationship between deterministic and non-deterministic space complexity. It states that for any function ,
In computational complexity theory, DTIME is the computational resource of computation time for a deterministic Turing machine. It represents the amount of time that a "normal" physical computer would take to solve a certain computational problem using a certain algorithm. It is one of the most well-studied complexity resources, because it corresponds so closely to an important real-world resource.
In computational complexity theory, P, also known as PTIME or DTIME(nO(1)), is a fundamental complexity class. It contains all decision problems that can be solved by a deterministic Turing machine using a polynomial amount of computation time, or polynomial time.
In computational complexity theory, the polynomial hierarchy is a hierarchy of complexity classes that generalize the classes NP and co-NP. Each class in the hierarchy is contained within PSPACE. The hierarchy can be defined using oracle machines or alternating Turing machines. It is a resource-bounded counterpart to the arithmetical hierarchy and analytical hierarchy from mathematical logic. The union of the classes in the hierarchy is denoted PH.
In computational complexity theory, the Cook–Levin theorem, also known as Cook's theorem, states that the Boolean satisfiability problem is NP-complete. That is, it is in NP, and any problem in NP can be reduced in polynomial time by a deterministic Turing machine to the Boolean satisfiability problem.
In computational complexity theory, the complexity class NEXPTIME is the set of decision problems that can be solved by a non-deterministic Turing machine using time .
In computational complexity theory, an alternating Turing machine (ATM) is a non-deterministic Turing machine (NTM) with a rule for accepting computations that generalizes the rules used in the definition of the complexity classes NP and co-NP. The concept of an ATM was set forth by Chandra and Stockmeyer and independently by Kozen in 1976, with a joint journal publication in 1981.
In computational complexity theory, NL is the complexity class containing decision problems that can be solved by a nondeterministic Turing machine using a logarithmic amount of memory space.
In computational complexity theory, L is the complexity class containing decision problems that can be solved by a deterministic Turing machine using a logarithmic amount of writable memory space. Formally, the Turing machine has two tapes, one of which encodes the input and can only be read, whereas the other tape has logarithmic size but can be read as well as written. Logarithmic space is sufficient to hold a constant number of pointers into the input and a logarithmic number of boolean flags, and many basic logspace algorithms use the memory in this way.
In computational complexity theory, P/poly is a complexity class representing problems that can be solved by small circuits. More precisely, it is the set of formal languages that have polynomial-size circuit families. It can also be defined equivalently in terms of Turing machines with advice, extra information supplied to the Turing machine along with its input, that may depend on the input length but not on the input itself. In this formulation, P/poly is the class of decision problems that can be solved by a polynomial-time Turing machine with advice strings of length polynomial in the input size. These two different definitions make P/poly central to circuit complexity and non-uniform complexity.
In computational complexity theory, the complexity class 2-EXPTIME (sometimes called 2-EXP) is the set of all decision problems solvable by a deterministic Turing machine in O(22p(n)) time, where p(n) is a polynomial function of n.
