US20080306387A1 - Finger mounted imaging and sensing assembly - Google Patents
Finger mounted imaging and sensing assembly Download PDFInfo
- Publication number
- US20080306387A1 US20080306387A1 US11/895,610 US89561007A US2008306387A1 US 20080306387 A1 US20080306387 A1 US 20080306387A1 US 89561007 A US89561007 A US 89561007A US 2008306387 A1 US2008306387 A1 US 2008306387A1
- Authority
- US
- United States
- Prior art keywords
- probe
- finger
- ultrasound
- assembly
- cable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
- A61B8/4488—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer the transducer being a phased array
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6825—Hand
- A61B5/6826—Finger
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/683—Means for maintaining contact with the body
- A61B5/6838—Clamps or clips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4209—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames
- A61B8/4227—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames characterised by straps, belts, cuffs or braces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
- A61B8/4472—Wireless probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B90/53—Supports for surgical instruments, e.g. articulated arms connected to the surgeon's body, e.g. by a belt
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4209—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames
Definitions
- Another problem is the disassociation, both in time and location, of the tactile input that a medical professional receives from his fingers, during a procedure, and the ultrasound imagery data.
- a medical procedure must be interrupted for imaging to occur, it may be quite difficult for the surgeon to match the tactile information that he notes with the imagery previously acquired.
- diagnostic procedures it may be impossible for the medical professional to gain both tactile information and image information simultaneously.
- the task of remembering and piecing together the two types of data presents an additional challenge to the medical professional.
- a problem faced specifically by cardiothoracic surgeons is that of assessing plaque deposits in a portion of the aortal arch and ascending aorta prior to accessing the portion of the aorta. If there are plaque deposits in the part of the aorta accessed, the deposit or a portion of it may break off, travel through the blood stream and lodge in a blood vessel, causing great damage to tissue that is dependent on the vessel for its blood supply.
- Doppler ultrasound probes are currently used for the assessment of plaque deposits in the aortal arch and ascending aorta
- intra-operative probes are about 10 cm long and rigid, for accessing interior portions of the body. Although this is potentially useful in some situations, it greatly complicates the task of successfully placing the probe for imaging a blood vessel and as in so many other intra-operative situations, permitting the user to maintain a correct sense for the orientation and position of the probe transducer.
- cardiothoracic surgeons Another issue faced by cardiothoracic surgeons is that of finding coronary arteries in a difficult-to-assess patient. Although in many patients the coronary arteries run close to or on the surface of the heart, in perhaps 10% of patients one or more coronary arteries are buried in cardiac tissue. This can create a serious problem for a cardiothoracic surgeon attempting to perform a bypass operation, in finding the correct artery. In a few unfortunate cases, an artery has been misidentified, leading to negative surgical results.
- the current configuration consisting of a permanently attached probe connected to a cable presents sterility issues.
- the cable typically could be autoclaved, but the sensor is too delicate.
- the entire sensor and cable assembly is rather bulky for fitting into a bath of disinfecting liquid and the connector is typically not designed to be immersed in disinfectant.
- achieving satisfactory sterility of the probe and cable assembly can present a challenge to hospital personnel.
- finger-mounted probes are currently known, they are typically either bulky and inflexible or they do not form precise imagery.
- the present invention may take the form of an ultrasound finger probe assembly that has a connector-half and a multi-conductor cable, electrically connected to the connector-half.
- a finger clip is adapted to be mounted on a human finger and an ultrasound finger probe is supported by the finger clip and includes elements adapted to provide therapeutic ultrasound.
- the multi-conductor cable includes some traces having a larger cross-section than others of the traces, the larger cross section traces being adapted to provide electricity for the therapeutic ultrasound elements.
- the present invention may take the form an ultrasound finger probe having a finger clip that is adapted to be mounted on a human finger and an ultrasound probe that is supported by the finger clip. Also, control input elements are mounted on the finger clip and are adapted to control the operation of the ultrasound probe.
- the present invention may take the form an ultrasound finger probe assembly that has a finger clip, adapted to be mounted on a human finger and an ultrasound probe, supported by the finger clip. Also, an optical viewing device is physically associated to the ultrasound probe and a cable is connected to the ultrasound probe and optical viewing device and adapted to transmit data from the ultrasound probe and optical viewing device to a further device.
- the present invention may take the form an ultrasound probe assembly that has a finger-mounted ultrasound imaging probe and a sensor that is physically associated to the ultrasound imaging probe.
- FIG. 1 is a perspective view of a probe assembly according to the present invention, shown in its environment, attached to a medical professional and ready for use.
- FIG. 2 is a perspective view of the probe assembly of FIG. 1 , in use on a patient.
- FIG. 3 is a perspective view of an alternative embodiment of the assembly of FIG. 1 , having a wireless link to an imaging station, in use on a patient.
- FIG. 4 is a perspective view of the assembly of FIG. 1 , showing a probe retaining clasp, on the forearm unit, in use.
- FIG. 5A is a perspective view of a work piece representing a first step in a manufacturing process for the finger probe that is part of the assembly of FIG. 1 .
- FIG. 5B is a perspective view of a work piece representing a second step in a manufacturing process for the finger probe that is part of the assembly of FIG. 1 .
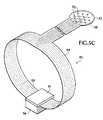
- FIG. 5C is a perspective view of a work piece representing a final step in a manufacturing process for the finger probe that is part of the assembly of FIG. 1 .
- FIG. 6 is a side view of the finger probe of FIG. 1 , showing navigational elements.
- FIG. 7 is a perspective view of an alternative embodiment of the probe of FIG. 1 , having a hypodermic needle attached.
- FIG. 8 is a perspective view of an alternative embodiment of the probe of FIG. 1 , having an electric camera attached.
- FIG. 9 is a perspective view of an alternative embodiment of the probe of FIG. 1 , having a set of sensors attached.
- FIG. 10 is a perspective view of an alternative embodiment of the probe of FIG. 1 , having a set of controls attached.
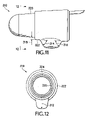
- FIG. 11 is a side view of a finger mounted probe, defining an angle of interest.
- FIG. 12 is a front view of the probe of FIG. 11 , showing a distance of interest.
- the present invention takes the form of an ultrasound imaging assembly 10 .
- This assembly includes an imaging station 12 , which can include an auxiliary display 13 , for the user's convenience.
- a first multi-conductor electrical cable 14 is electrically attached to the imaging station and terminates at a distal connector-half 16 .
- a second multi-conductor cable 18 extends from a shoulder mounted connector half 20 , which mates to the distal connector half 16 and terminates at a wrist or forearm band 22 that supports a forearm mounted connector-half 24 .
- a finger probe sub-assembly 26 includes a finger probe sub-assembly connector-half 28 that mates with the forearm mounted connector-half 24 .
- a cable in the form of a ribbon 29 extends from connector-half 28 to a finger-mounted probe 30 .
- surgery may begin with the surgeon wearing the wrist band 22 , which retains connector-half 24 and cable assembly 18 , which includes shoulder mounted connector 20 .
- no finger probe sub-assembly 26 would be attached to cable 18 and that no station cable 14 would be connected to assembly 18 , so that the user would be free to move about freely. This would also permit the surgeon full use of his hands while making an initial incision and further initial surgical cutting.
- the surgeon can take a sub-assembly 26 , that has been kept ready for use, attach it to connector-half 24 and also have cable assembly 18 connected to imaging station 12 , by way of cable 14 and connector-halves 16 and 20 .
- sub-assembly 26 can be removed and detached from connector-half 24 , to free the surgeon to continue his procedure. Later on, when further imagery is required, either the same sub-assembly 26 may be reattached or another sub-assembly 26 , maintained in sterility can be attached to perform the further imaging. In a preferred embodiment, various probe configurations are kept at the ready, to provide the surgeon with a variety of image gathering options.
- This set of probes could vary in transmit frequency also, so that a first probe permits detailed imaging of fine structures, by using a relatively high frequency (@10-20 MHz), and a second lower resolution probe permits imaging of deeper structures using a lower ultrasound frequency (@2-10 MHz).
- Probes of various shapes and architectures are also made available to permit varying field of views. For example a curved linear array with relatively small radius of curvature permits imaging in the near field of the probe over a wide field of view.
- a phased array transducer permits imaging over a wide field of view at some distance from the array, while allowing imaging through a narrow access.
- a linear array permits imaging over a narrower field of view but provides good imaging of structures near the surface of the array. This is frequently the type of imagery that is highly desirable in surgical situations.
- the use of a linear array in a finger mounted probe can be particularly advantageous.
- the probe can be configured so that the linear array images a scan plane that is parallel to the length dimension of the finger, or in another configuration, transverse to the finger. For the parallel configuration a portion of the scan looks forward from the finger, so that if the user directs his finger to point at the body surface, the probe will image a scan plane into the body. The user can then rotate the image plane by twisting his wrist, something that is quite easy for most users to do.
- the curved surface permits a user to rock the probe on the body or organ surface in order to view tissue over a variety of contact angles.
- the transverse mounted probe has the advantage that it permits a physician to begin his examination with his hand transverse to the length of the patient's torso, which is a more natural position than parallel to the length of the patient's torso.
- a straight linear array or a phased array has the advantage that the probe head profile can potentially be minimized, which is very important in accessing body portions.
- the probe assembly 10 is also very useful in non-surgical procedures, for example, examination of a patient by imaging through the body surface, at the same time the physician is gathering tactile information.
- the physician may wish to examine a bump or discolored area on the patient's skin and could by use of assembly 10 gather imagery at the same time he touches the abnormal area to diagnose the nature of the problem.
- the user can make a fuller use of his muscle memory and positional awareness to return the probe head to the same location used in a recent probe use.
- Probe assembly 10 is also used for exploration of body cavities, such as the vagina, rectum or mouth. Again, the user could both gain tactile information about an organ, such as the prostate gland at the same time he is gaining image information.
- a physician may use assembly 10 to view difficult-to-access areas within the body, during surgery.
- the surgeon could move the probe 30 around to the posterior of the heart to gain imagery of heart features, such as valves that are difficult to otherwise image. This would be extremely difficult with a rigid probe that is poorly shaped for moving though tissue.
- a probe without advantageous physical characteristics could easily damage a patient during this type of use.
- assembly 10 can be used in an army field hospital to assist a surgeon in the task of removing shrapnel from a wounded soldier.
- an initial evaluation of the shrapnel locations could be made by an assessment of the entry wounds and pre-surgical imaging, a great deal might still not be known about the specific locations and dimensions of the individual pieces of shrapnel.
- the surgeon attaches a sub-assembly 26 to connector-half 24 and introduces the finger mounted probe 30 into the incision, to gain a further indication of the shrapnel positions.
- sub-assembly 26 After gaining this information, the surgeon can quickly remove sub-assembly 26 , so that he can have the full use of both hands in the task of removing pieces of shrapnel identified by the imaging. Later on during the same surgery, the surgeon may wish to take further images and may reattach sub-assembly 26 , or some other sub-assembly 26 , either for the sake of sterility or for the sake of having different imaging characteristics.
- the low profile of probe 30 lends itself to imaging a premature infant in a neo-natal incubator, by reaching through the small entry orifice of the incubator. This action is difficult to do with currently available ultrasound probes.
- cable 18 may be sterilized in an autoclave without being damaged. Cable 14 is typically far enough removed from the sterile area so that it can be wiped down with disinfectant between instances of use. Probe sub-assembly 26 can be submerged in disinfectant fluid for sterilization.
- cable 18 is protected by a sterile sheath, which can be removed when a physician, who is wearing cable 18 , needs to move to a different imaging station 12 and use a different probe assembly 26 .
- probe assembly 26 is elongated, so that cable 18 does not have to extend as far toward probe 30 , thereby making it more likely for cable 18 to avoid contamination from body fluids.
- cable 18 may be a universal unit, fitting to a broad range of probe makes, by having a super-set of pins, not all of which are used for any particular sub-assembly 26 .
- An adapter is provided that would be interposed between cable 18 and imaging station 12 , either where cable 18 connects to cable 14 , where cable 14 connects to station 12 , or as part of cable 14 .
- a different adapter is necessary for each make of imaging station 12 . It should be noted that this feature of system 10 can be used to increase the usability for ultrasound probes that are not finger probes.
- a wireless link is established between sub-assembly 26 and imaging station 12 .
- a data processing and transmission unit 32 receives the signals from probe 30 and extracts the imagery, thereby greatly reducing the volume of data to be transmitted.
- the imagery is transmitted, typically by RF, to imaging station 12 and/or to heads-up display goggles 34 , which superimpose the imagery on the user's field-of-view.
- unit 32 is located directly on the wrist band 22 .
- a catch 40 is provided on wrist band 22 , for the purpose of retaining probe 30 , so that it can be folded back, out of the way of the user's hand, when not in use.
- catch 40 is implemented by a system of magnets, with mutually attractive magnets on wrist band 22 and probe 30 .
- Probe sub-assembly 26 is made of light weight materials and has a mass of less than 70 grams.
- the distal 3 cm of probe 30 which includes the ultrasound transceiver, has a mass of about 11 grams. This low mass is very important in enabling a user to easily maneuver the probe 30 .
- flex-circuit is a term of art in the electric device industry, referencing a connective element made of a sheet of polymeric dielectric material having conductive traces formed on it by photolithographic techniques. It may be sealed with an additional sheet of polymeric material, so that the conductive traces are interposed and sealed between the two sheets.
- construction of sub-assembly 26 begins with the creation of a T-shaped piece of flex circuit 40 .
- two L-shaped pieces are placed side-to-side to form a T-shape.
- the length 46 between a proximal end 42 and a distal end 43 , of flex circuit 40 is 25 cm.
- the length 48 of the T-shape top bar at distal end 43 is 2.5 cm.
- the distal end T-shape top bar is made of a first branch 44 and a second branch 45 .
- Conductive traces 50 each turn at the T-junction and extend almost the entire extent from proximal end 42 to the end of either branch 44 or 45 .
- a set of bare trace ends 53 are formed at the free ends of branches 44 and 45 by removing the end of the plastic of flex circuit 40 from about traces 50 , typically by laser ablation.
- An ultrasound transceiver is formed by connecting the trace ends 53 , to a piece of piezoelectric material 56 .
- a high performance acoustically absorptive backing material 54 is affixed behind piezoelectric material 56 , so that trace ends 53 are encapsulated between backing material 54 and piezoelectric material 56 .
- Backing material 54 may be as disclosed in U.S. Pat. No. 4,779,244, issued Oct. 18, 1988, which is incorporated by reference as if fully set forth herein.
- a backing material having an acoustic absorbance equal to or greater than 60 db/cm/MHz is disclosed.
- such a probe could be modified by creating a toothed pattern, such as that found on the sides of an anechoic chamber, in the surface of the backing material that faces away from the ultrasound array. This causes the sound waves reflecting off the rear of the ultrasound array stack to scatter.
- the piezoelectric material 56 is then patterned as shown, with each resultant element created by this patterning being connected to a unique trace 53 .
- even ultrasound elements are connected to branch 44
- the interposed odd elements are connected to branch 45 , or vice versa.
- Skilled persons will appreciate that the alternative method of construction noted above, in which two L-shaped pieces of flex circuit are used, rather than a single T-shaped piece, permits the step of connecting bare traces 53 to materials 54 and 56 to be performed with the two L-shaped pieces of flex circuit laying flat, thereby greatly easing this connective task.
- the two L-shaped pieces may then be curled up and joined at the top, thereby forming an annulus that fits about the finger.
- a probe 30 constructed according to the preferred methods described herein may have a distance 312 from the interior surface 324 of the finger mount to the furthest protrusion of the probe of about 1.2 cm, greatly facilitating a user in passing the probe 310 through tight passages in the body. In another embodiment distance 312 equals about 1.5 cm.
- probe 30 is made in a preferred embodiment so that the ultrasound transceiver protrudes gradually outwardly (downwardly) from front to middle.
- angle 314 as the angle between a probe surface that extends parallel to the user's finger and the surface of the probe as it begins to protrude outwardly, angle 314 is about 70° at its maximum. In an alternative preferred embodiment, angle 314 is about 60° at its maximum and in yet another preferred embodiment, this angle is about 50° at its maximum. In yet another preferred embodiment, angle 314 is about 40°.
- An additional angle 316 may be defined as the angle between a probe surface that extends parallel to the user's finger and the surface of the probe as it begins to extend outwardly, going from rear to front. It is also desirable to minimize angle 316 , so that as the probe is being removed back though tissue, it disturbs the tissue as little as possible. In a preferred embodiment this angle is about 40°. In other preferred embodiments this angle ranges from 40° to 70°.
- a finger cot 320 is used to both isolate the front of the finger from tissue, provide a rounded surface at the front of the finger, which can be pushed through tissue with less chance of causing damage, and making it possible for a probe unit 310 having a fixed inner diameter 324 to accommodate a range of finger thicknesses, by providing a range of cots having different thicknesses. It is desirable to minimize the distance 318 between finger cot 320 and probe surface 322 . Although this distance is shown as being on the order of 2 mm, in another preferred embodiment distance 318 is zero, with the finger cot 320 being flush with the probe surface.
- This low profile and gradual protrusion greatly facilitates a probe user in inserting the probe into small body cavities and avoiding damage to delicate tissues.
- a “bullet shaped” probe that comes to a point forward of the finger and smoothly expands to the area where the transponder is located. This can be accomplished by equipping the probe with a forward section that terminates distal to the finger tip in a single point and expands transversely outwardly approximately equally and smoothly in each direction, to yield the bullet shape.
- a 128 element probe is constructed and in an alternative preferred embodiment a 256 element probe is constructed.
- the probe head is completed by adding a lens and housing. Skilled persons will recognize that although a linear array is shown, a curved linear array could be constructed just as easily, using the techniques shown, simply by curving the piezoelectric material after it is diced.
- a separately formed ultrasound transceiver is connected to flex circuit 40 by way of a flex circuit connective tab.
- flex circuit 40 rather than terminating in connector-half 24 , can be terminated at a multi-conductor coaxial cable, of the type that is currently standard in the ultrasound imaging industry, 5 cm or more away from the probe with or without a connector.
- the multi-conductor coaxial cable terminates quite close to the probe head or in the probe head, causing the finger-mounted portion to be bulky and heavy.
- the finger-mounted portion By extending the flex circuit portion more than 5 cm from the probe itself, and preferably more than 10 cm or even 20 cm, the finger-mounted portion is kept light and given a low profile. Accordingly, the present invention is not limited to the system connectors that although advantageous do not by themselves yield the low profile of the probe.
- CMUT capacitive micro-machined ultrasound transceiver
- traces 50 are connected to traces 50 , using the same techniques as used for connecting piezoelectric material 56 .
- a CMUT transceiver tends to be thermally robust, thereby lending itself to use in a probe that may be exposed to the heat and pressure of an autoclave sterilization cycle, without being damaged.
- a set of electrical contact points 52 are formed by removing the flex circuit plastic down to each trace 50 , in a particular spot. Conductive material is deposited onto contacts 52 , so that they are not recessed. Alternatively, a surface coating material covers flex traces so that only connector contacts 52 are left exposed on the surface of flex forming contacts 52 . Rigid backing material 58 is adhered underneath the flex circuit and a metal housing (not shown) is provided to finished connector-half 22 .
- the proximal end of the flex circuit can be selectively rigidized by laminating a rigid, circuit board material layer onto the flexible portion, and forming connections to the flex traces by laser or mechanical drilling and subsequent plating, to form a monolithic integrated connector assembly.
- a finger probe 70 includes a set of accelerometers (not shown) and/or inductors 72 that are mounted in a mutually orthogonal pattern are provided as part of finger probe 30 to permit location determination while finger probe 30 is within the body and not directly observable.
- a hypodermic needle 200 and an attached syringe 210 are releasably mounted adjacent finger probe 30 .
- Health care professionals sometime need to find a particular blood vessel, such as the jugular vein, in order to inject fluid or drugs as soon as possible so that the substance being injected will reach a target organ as quickly as possible.
- color flow ultrasound imagery in which Doppler flow information drives the display of the blood vessels and non-Doppler information drives the display for the surrounding tissue, is particularly useful in this endeavor.
- another sort of skin broaching device such as a canula (not shown) or a hypodermic needle connected to an intravenous drip bag is associated to the ultrasound probe.
- Guidance of the hypodermic needle associated with the finger probe may also be assisted by use of commercially available guidance devices, such as a pressure sensor associated with the needle, including that available from Vascular Technologies, Ness-Ziona, Israel, which provide an additional positive indication when the needle enters a vein, through sensing a pressure change.
- optical link 260 and light source 262 is provided to permit optical viewing of body tissue.
- the optical link 60 is in the form of a lens coupled to a fiber optic link on probe 30 that may terminate in a video camera.
- optic link 260 is in the form of a video camera (as shown) attached to the finger probe 30 and adapted to communicate electrically with the imaging station 12 , or heads up display 34 . In either situation it is necessary to provide light for the optical link 260 . This is accomplished either by an electrically powered light source, such as a light emitting diode 262 , or a chemically powered light source (not shown), such as those available under the trade name “pin lights,” from Embo-Optics of Beverly, Mass.
- a finger probe such as 30 is equipped with a sensor suite that includes a thermometer 280 , an oximeter 282 , a pressure sensor 284 and a glucometer 286 .
- element 286 is an agent administration patch 286 that is electrically activated by a trace 50 to express the agent, thereby administering the agent to a precise location.
- a smaller set of sensors is provided, or even a single sensor only.
- a finger assembly 130 can both image tissue, using ultrasound, and that can also provide therapy, typically by cauterizing tissue, also using ultrasound.
- the treatment array uses up to 100 watts of power and is powered by traces that are larger in cross-sectional dimension and are therefore capable of conducting more current in order to meet the greater power demands of treatment array 294 .
- a smaller number of sensors, or just one sensor, are available.
- an ultrasound assembly (not shown), a single array is used for both imaging and treatment.
- some piezoelectric elements are used for both imaging and treatment and others are used solely for imaging.
- the array must be powered by a larger input of current and to accommodate this need, larger cross-section traces 40 ( FIG. 5A ) are provided for the treatment ultrasound elements.
- a set of thumb controls 290 are provided for probe 288 , so that the user may switch between imaging and treatment. These controls are typically in the form of a small push button that must be pressed in a specific pattern, for example two rapid presses followed by continuous pressure during the period of time treatment is desired, in order to activate treatment mode, as any inadvertent activation could greatly harm a patient.
- a warning signal is given when two rapid presses have placed the treatment probe in a “ready” state, in case some passage through tissue ever causes two rapid presses to occur.
- controls are placed on the wrist or forearm band 22 , thereby providing easy access for a probe user.
- buttons 290 are provided for a probe, such as probe 30 , in which therapeutic ultrasound is not available.
- the buttons are instrumented to change the scan width and orientation; the transmit power and frequency; and imaging mode among other quantities.
- the buttons 290 communicate with imaging station 12 by way of traces 50 and cables 18 and 14 or by RF transmission in the embodiment of FIG. 3 .
- the buttons 290 may also communicate or be mechanically associated with the array within the finger probe to allow a change in orientation of the array elements to effect the orientation of the scan plane.
- probe 30 is for the intra-operative evaluation of plaque deposits in the aortal arch and ascending aorta, prior to accessing the aorta.
- a Doppler probe may be used and a measurement of the speed of the blood in the aorta formed.
- the blood flows more rapidly.
- the accessing of the tissue of the aorta is greatly eased by use of a finger mounted probe, as opposed to the long, stiff intra-operative probes currently available.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Computer Networks & Wireless Communication (AREA)
- Gynecology & Obstetrics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Description
- This application claims priority from application Ser. No. 60/923,323 filed Apr. 13, 2007, from application Ser. No. 60/861,319 filed Nov. 27, 2006 and from application Ser. No. 10/863,644 filed Jun. 8, 2004, all of which are incorporated by reference as if fully set forth herein.
- During a surgical procedure the timely acquisition of ultrasound imagery can mean the difference between life and death for the patient. Many devices and techniques have been developed or suggested to facilitate the speedy acquisition of ultrasound data, including laparoscopic ultrasound probes, finger mounted probes and hand-held probes having the ability to wirelessly transmit image data. Unfortunately, a number of problems continue to hamper medical personnel in the use of these devices.
- For a hand held probe, users must take an extra mental step to remember and account for the distance between the position of the sensor head and the position of the user's hand. Frequently, the user is required to perform many mental tasks simultaneously, such as reviewing imagery; manipulating the probe to effect delicate changes in the probe pressure and angle; and accessing a bank of medical knowledge in an effort to diagnose a medical problem. During the stress of a medical procedure the task of mentally calculating the probe position and orientation, based on knowledge of the probe geometry, is an extra task that taxes the already highly-taxed mental resources of the medical professional. In addition, the extra displacement of the hand from the target probe head position reduces the ability to utilize muscle memory for probe positioning.
- Another problem is the disassociation, both in time and location, of the tactile input that a medical professional receives from his fingers, during a procedure, and the ultrasound imagery data. For example, for situations in which a medical procedure must be interrupted for imaging to occur, it may be quite difficult for the surgeon to match the tactile information that he notes with the imagery previously acquired. In diagnostic procedures, it may be impossible for the medical professional to gain both tactile information and image information simultaneously. The task of remembering and piecing together the two types of data presents an additional challenge to the medical professional.
- Yet another problem encountered by users of currently available probes is the difficulty in fitting a probe into a small area. The human body is largely composed of delicate tissue, and the object of the medical professional is often to address a localized medical problem while disturbing surrounding or intervening tissue as little as possible. For example, one type of desired imagery that is currently very difficult to acquire is imagery from the posterior of the heart. Hand held probes and/or probes having a large cross-section present a particular difficulty when it is desirable to move the probe head through body tissue in order to obtain imagery of interest.
- Still another issue presented by currently available probes is the awkwardness of use, as the probe is typically tethered by a multi-conductor coaxial cable that is one to three meters long, to an imaging station. It is typically difficult to twist this cable, so rotating the probe about its longitudinal axis may prove difficult. In addition, the heavy weight of the cable and need to grip the probe handle have the potential to create repetitive motion injuries to sonographers and physicians who use the ultrasound probe.
- Moreover, many of the tools available for imaging the internal regions of the human body may be unavailable in a particular case, due to special conditions. For example, although trans-esophageal imaging is an extremely valuable tool for cardiac surgeons, there are instances in which the esophagus is diseased, making it potentially harmful to insert a probe into the esophagus. In these situations, having some other method of imaging would be invaluable.
- A problem faced specifically by cardiothoracic surgeons is that of assessing plaque deposits in a portion of the aortal arch and ascending aorta prior to accessing the portion of the aorta. If there are plaque deposits in the part of the aorta accessed, the deposit or a portion of it may break off, travel through the blood stream and lodge in a blood vessel, causing great damage to tissue that is dependent on the vessel for its blood supply. Although Doppler ultrasound probes are currently used for the assessment of plaque deposits in the aortal arch and ascending aorta, currently available intra-operative probes are about 10 cm long and rigid, for accessing interior portions of the body. Although this is potentially useful in some situations, it greatly complicates the task of successfully placing the probe for imaging a blood vessel and as in so many other intra-operative situations, permitting the user to maintain a correct sense for the orientation and position of the probe transducer.
- Another issue faced by cardiothoracic surgeons is that of finding coronary arteries in a difficult-to-assess patient. Although in many patients the coronary arteries run close to or on the surface of the heart, in perhaps 10% of patients one or more coronary arteries are buried in cardiac tissue. This can create a serious problem for a cardiothoracic surgeon attempting to perform a bypass operation, in finding the correct artery. In a few unfortunate cases, an artery has been misidentified, leading to negative surgical results.
- Moreover, the current configuration consisting of a permanently attached probe connected to a cable presents sterility issues. The cable typically could be autoclaved, but the sensor is too delicate. The entire sensor and cable assembly, however, is rather bulky for fitting into a bath of disinfecting liquid and the connector is typically not designed to be immersed in disinfectant. As a result, achieving satisfactory sterility of the probe and cable assembly can present a challenge to hospital personnel.
- Moreover, changing the command to the sensor head, for example increasing or decreasing power, or changing the field of view of the scan or the frequency transmitted for typical current systems requires an adjustment at the imaging station, which is awkward for a medical professional in the middle of a procedure.
- Although finger-mounted probes are currently known, they are typically either bulky and inflexible or they do not form precise imagery.
- The following embodiments and aspects thereof are described and illustrated in conjunction with systems, tools and methods which are meant to be exemplary and illustrative, not limiting in scope. In various embodiments, one or more of the above-described problems have been reduced or eliminated, while other embodiments are directed to other improvements.
- In a first separate aspect, the present invention may take the form of an ultrasound finger probe assembly that has a connector-half and a multi-conductor cable, electrically connected to the connector-half. Also, a finger clip is adapted to be mounted on a human finger and an ultrasound finger probe is supported by the finger clip and includes elements adapted to provide therapeutic ultrasound. The multi-conductor cable includes some traces having a larger cross-section than others of the traces, the larger cross section traces being adapted to provide electricity for the therapeutic ultrasound elements.
- In a second separate aspect, the present invention may take the form an ultrasound finger probe having a finger clip that is adapted to be mounted on a human finger and an ultrasound probe that is supported by the finger clip. Also, control input elements are mounted on the finger clip and are adapted to control the operation of the ultrasound probe.
- In a third separate aspect, the present invention may take the form an ultrasound finger probe assembly that has a finger clip, adapted to be mounted on a human finger and an ultrasound probe, supported by the finger clip. Also, an optical viewing device is physically associated to the ultrasound probe and a cable is connected to the ultrasound probe and optical viewing device and adapted to transmit data from the ultrasound probe and optical viewing device to a further device.
- In a fourth separate aspect, the present invention may take the form an ultrasound probe assembly that has a finger-mounted ultrasound imaging probe and a sensor that is physically associated to the ultrasound imaging probe.
- In addition to the exemplary aspects and embodiments described above, further aspects and embodiments will become apparent by reference to the drawings and by study of the following detailed descriptions.
-
FIG. 1 is a perspective view of a probe assembly according to the present invention, shown in its environment, attached to a medical professional and ready for use. -
FIG. 2 is a perspective view of the probe assembly ofFIG. 1 , in use on a patient. -
FIG. 3 is a perspective view of an alternative embodiment of the assembly ofFIG. 1 , having a wireless link to an imaging station, in use on a patient. -
FIG. 4 is a perspective view of the assembly ofFIG. 1 , showing a probe retaining clasp, on the forearm unit, in use. -
FIG. 5A is a perspective view of a work piece representing a first step in a manufacturing process for the finger probe that is part of the assembly ofFIG. 1 . -
FIG. 5B is a perspective view of a work piece representing a second step in a manufacturing process for the finger probe that is part of the assembly ofFIG. 1 . -
FIG. 5C is a perspective view of a work piece representing a final step in a manufacturing process for the finger probe that is part of the assembly ofFIG. 1 . -
FIG. 6 is a side view of the finger probe ofFIG. 1 , showing navigational elements. -
FIG. 7 is a perspective view of an alternative embodiment of the probe ofFIG. 1 , having a hypodermic needle attached. -
FIG. 8 is a perspective view of an alternative embodiment of the probe ofFIG. 1 , having an electric camera attached. -
FIG. 9 is a perspective view of an alternative embodiment of the probe ofFIG. 1 , having a set of sensors attached. -
FIG. 10 is a perspective view of an alternative embodiment of the probe ofFIG. 1 , having a set of controls attached. -
FIG. 11 is a side view of a finger mounted probe, defining an angle of interest. -
FIG. 12 is a front view of the probe ofFIG. 11 , showing a distance of interest. - In a first preferred embodiment, the present invention takes the form of an
ultrasound imaging assembly 10. This assembly includes animaging station 12, which can include anauxiliary display 13, for the user's convenience. Also, a first multi-conductorelectrical cable 14 is electrically attached to the imaging station and terminates at a distal connector-half 16. A secondmulti-conductor cable 18 extends from a shoulder mountedconnector half 20, which mates to thedistal connector half 16 and terminates at a wrist orforearm band 22 that supports a forearm mounted connector-half 24. Afinger probe sub-assembly 26 includes a finger probe sub-assembly connector-half 28 that mates with the forearm mounted connector-half 24. A cable in the form of aribbon 29 extends from connector-half 28 to a finger-mountedprobe 30. - In use, surgery may begin with the surgeon wearing the
wrist band 22, which retains connector-half 24 andcable assembly 18, which includes shoulder mountedconnector 20. At this stage it is possible that nofinger probe sub-assembly 26 would be attached tocable 18 and that nostation cable 14 would be connected toassembly 18, so that the user would be free to move about freely. This would also permit the surgeon full use of his hands while making an initial incision and further initial surgical cutting. When the area of interest in the patient's body has been accessed, the surgeon can take a sub-assembly 26, that has been kept ready for use, attach it to connector-half 24 and also havecable assembly 18 connected toimaging station 12, by way ofcable 14 and connector-halves cable 18 tocable 14. Alternatively, a person having sterile hands could briefly don sterile gloves to effect the connection and then doff the gloves after finishing. In yet another possibility, thecable 14 is equipped with a sheath, which can be broken away and which is sterile underneath. - The surgeon can then introduce his hand, with the
probe 30 attached, into the patient in order to gather imagery, as shown inFIG. 2 . After the imagery is gathered, yielding an enhanced knowledge of the problem being addressed, sub-assembly 26 can be removed and detached from connector-half 24, to free the surgeon to continue his procedure. Later on, when further imagery is required, either thesame sub-assembly 26 may be reattached or another sub-assembly 26, maintained in sterility can be attached to perform the further imaging. In a preferred embodiment, various probe configurations are kept at the ready, to provide the surgeon with a variety of image gathering options. This set of probes could vary in transmit frequency also, so that a first probe permits detailed imaging of fine structures, by using a relatively high frequency (@10-20 MHz), and a second lower resolution probe permits imaging of deeper structures using a lower ultrasound frequency (@2-10 MHz). Probes of various shapes and architectures are also made available to permit varying field of views. For example a curved linear array with relatively small radius of curvature permits imaging in the near field of the probe over a wide field of view. A phased array transducer permits imaging over a wide field of view at some distance from the array, while allowing imaging through a narrow access. A linear array permits imaging over a narrower field of view but provides good imaging of structures near the surface of the array. This is frequently the type of imagery that is highly desirable in surgical situations. - The use of a linear array in a finger mounted probe can be particularly advantageous. The probe can be configured so that the linear array images a scan plane that is parallel to the length dimension of the finger, or in another configuration, transverse to the finger. For the parallel configuration a portion of the scan looks forward from the finger, so that if the user directs his finger to point at the body surface, the probe will image a scan plane into the body. The user can then rotate the image plane by twisting his wrist, something that is quite easy for most users to do. In the case of a curved linear array, the curved surface permits a user to rock the probe on the body or organ surface in order to view tissue over a variety of contact angles. This is particularly easy to do using a finger mounted probe, as the index finger has a good freedom of movement in several axes. The transverse mounted probe has the advantage that it permits a physician to begin his examination with his hand transverse to the length of the patient's torso, which is a more natural position than parallel to the length of the patient's torso. A straight linear array or a phased array, however, has the advantage that the probe head profile can potentially be minimized, which is very important in accessing body portions.
- The
probe assembly 10 is also very useful in non-surgical procedures, for example, examination of a patient by imaging through the body surface, at the same time the physician is gathering tactile information. For example, the physician may wish to examine a bump or discolored area on the patient's skin and could by use ofassembly 10 gather imagery at the same time he touches the abnormal area to diagnose the nature of the problem. Additionally, the user can make a fuller use of his muscle memory and positional awareness to return the probe head to the same location used in a recent probe use. - Probe
assembly 10 is also used for exploration of body cavities, such as the vagina, rectum or mouth. Again, the user could both gain tactile information about an organ, such as the prostate gland at the same time he is gaining image information. - A physician may use
assembly 10 to view difficult-to-access areas within the body, during surgery. For example during open heart surgery, the surgeon could move theprobe 30 around to the posterior of the heart to gain imagery of heart features, such as valves that are difficult to otherwise image. This would be extremely difficult with a rigid probe that is poorly shaped for moving though tissue. A probe without advantageous physical characteristics could easily damage a patient during this type of use. - Referring to
FIG. 2 , in an additional example,assembly 10 can be used in an army field hospital to assist a surgeon in the task of removing shrapnel from a wounded soldier. Although an initial evaluation of the shrapnel locations could be made by an assessment of the entry wounds and pre-surgical imaging, a great deal might still not be known about the specific locations and dimensions of the individual pieces of shrapnel. After making an initial incision near an entry wound, the surgeon attaches a sub-assembly 26 to connector-half 24 and introduces the finger mountedprobe 30 into the incision, to gain a further indication of the shrapnel positions. After gaining this information, the surgeon can quickly removesub-assembly 26, so that he can have the full use of both hands in the task of removing pieces of shrapnel identified by the imaging. Later on during the same surgery, the surgeon may wish to take further images and may reattachsub-assembly 26, or someother sub-assembly 26, either for the sake of sterility or for the sake of having different imaging characteristics. - In another possible application, the low profile of
probe 30 lends itself to imaging a premature infant in a neo-natal incubator, by reaching through the small entry orifice of the incubator. This action is difficult to do with currently available ultrasound probes. - The system described above, having
cables probe sub-assembly 26 has advantages both in providing a broad range of connectivity and in easing the task of maintaining a sterile operating theater. In a preferred embodiment,cable 18 may be sterilized in an autoclave without being damaged.Cable 14 is typically far enough removed from the sterile area so that it can be wiped down with disinfectant between instances of use. Probe sub-assembly 26 can be submerged in disinfectant fluid for sterilization. In an alternative embodiment,cable 18 is protected by a sterile sheath, which can be removed when a physician, who is wearingcable 18, needs to move to adifferent imaging station 12 and use adifferent probe assembly 26. In another alternative,probe assembly 26 is elongated, so thatcable 18 does not have to extend as far towardprobe 30, thereby making it more likely forcable 18 to avoid contamination from body fluids. - Also,
cable 18 may be a universal unit, fitting to a broad range of probe makes, by having a super-set of pins, not all of which are used for anyparticular sub-assembly 26. An adapter is provided that would be interposed betweencable 18 andimaging station 12, either wherecable 18 connects tocable 14, wherecable 14 connects to station 12, or as part ofcable 14. A different adapter is necessary for each make ofimaging station 12. It should be noted that this feature ofsystem 10 can be used to increase the usability for ultrasound probes that are not finger probes. - Referring to
FIG. 3 , in an alternative preferred embodiment a wireless link is established betweensub-assembly 26 andimaging station 12. A data processing andtransmission unit 32 receives the signals fromprobe 30 and extracts the imagery, thereby greatly reducing the volume of data to be transmitted. The imagery is transmitted, typically by RF, toimaging station 12 and/or to heads-updisplay goggles 34, which superimpose the imagery on the user's field-of-view. In an alternativepreferred embodiment unit 32 is located directly on thewrist band 22. Referring toFIG. 4 , in a preferred embodiment acatch 40 is provided onwrist band 22, for the purpose of retainingprobe 30, so that it can be folded back, out of the way of the user's hand, when not in use. In an alternative preferred embodiment, catch 40 is implemented by a system of magnets, with mutually attractive magnets onwrist band 22 andprobe 30.Probe sub-assembly 26 is made of light weight materials and has a mass of less than 70 grams. The distal 3 cm ofprobe 30, which includes the ultrasound transceiver, has a mass of about 11 grams. This low mass is very important in enabling a user to easily maneuver theprobe 30. - Applicant notes, in connection with the immediately following discussion, that flex-circuit is a term of art in the electric device industry, referencing a connective element made of a sheet of polymeric dielectric material having conductive traces formed on it by photolithographic techniques. It may be sealed with an additional sheet of polymeric material, so that the conductive traces are interposed and sealed between the two sheets. Referring to
FIGS. 5A-5C , in one preferred embodiment construction ofsub-assembly 26 begins with the creation of a T-shaped piece offlex circuit 40. In an alternative preferred embodiment, two L-shaped pieces are placed side-to-side to form a T-shape. Thelength 46 between aproximal end 42 and a distal end 43, offlex circuit 40 is 25 cm. Thelength 48 of the T-shape top bar at distal end 43 is 2.5 cm. The distal end T-shape top bar is made of afirst branch 44 and a second branch 45. Conductive traces 50, each turn at the T-junction and extend almost the entire extent fromproximal end 42 to the end of eitherbranch 44 or 45. - A set of bare trace ends 53 are formed at the free ends of
branches 44 and 45 by removing the end of the plastic offlex circuit 40 from abouttraces 50, typically by laser ablation. An ultrasound transceiver is formed by connecting the trace ends 53, to a piece ofpiezoelectric material 56. After attachment, a high performance acousticallyabsorptive backing material 54 is affixed behindpiezoelectric material 56, so that trace ends 53 are encapsulated betweenbacking material 54 andpiezoelectric material 56. Backingmaterial 54 may be as disclosed in U.S. Pat. No. 4,779,244, issued Oct. 18, 1988, which is incorporated by reference as if fully set forth herein. In this patent a backing material having an acoustic absorbance equal to or greater than 60 db/cm/MHz is disclosed. Using such a material and given the need to attenuate a typical 5 MHz ultrasound signal emitted from the back of the array by approximately 150 dB through a two-way trip through the material (so as not to interfere with the image), the array backing would be approximately Xcm=150/(60 db/cm/Mhz*2*5 MHz)=2.5 mm, which provides a very low profile for a transducer to fit on the finger. - In instances where a high absorptive backing material is not available, such as for a pre-existing probe retrofit, such a probe could be modified by creating a toothed pattern, such as that found on the sides of an anechoic chamber, in the surface of the backing material that faces away from the ultrasound array. This causes the sound waves reflecting off the rear of the ultrasound array stack to scatter.
- The
piezoelectric material 56 is then patterned as shown, with each resultant element created by this patterning being connected to a unique trace 53. In a preferred embodiment, even ultrasound elements are connected to branch 44, while the interposed odd elements are connected to branch 45, or vice versa. Skilled persons will appreciate that the alternative method of construction noted above, in which two L-shaped pieces of flex circuit are used, rather than a single T-shaped piece, permits the step of connecting bare traces 53 tomaterials - Referring to
FIG. 5C , thebranches 44 and 45 are curved downwardly to fit about a finger, so thatultrasound array 56 now faces downwardly and is oriented to sweep from forward and backward relative to the finger. A housing is added about the ring that is formed bybranches 44 and 45 andmaterials final probe 30, such as is shown inFIGS. 7-10 . A protective coating may be added to the medial portion offlex circuit 40. Referring toFIGS. 11 and 12 , aprobe 30 constructed according to the preferred methods described herein may have adistance 312 from theinterior surface 324 of the finger mount to the furthest protrusion of the probe of about 1.2 cm, greatly facilitating a user in passing theprobe 310 through tight passages in the body. In anotherembodiment distance 312 equals about 1.5 cm. - Moreover probe 30 is made in a preferred embodiment so that the ultrasound transceiver protrudes gradually outwardly (downwardly) from front to middle. Defining an
angle 314, as the angle between a probe surface that extends parallel to the user's finger and the surface of the probe as it begins to protrude outwardly,angle 314 is about 70° at its maximum. In an alternative preferred embodiment,angle 314 is about 60° at its maximum and in yet another preferred embodiment, this angle is about 50° at its maximum. In yet another preferred embodiment,angle 314 is about 40°. Anadditional angle 316 may be defined as the angle between a probe surface that extends parallel to the user's finger and the surface of the probe as it begins to extend outwardly, going from rear to front. It is also desirable to minimizeangle 316, so that as the probe is being removed back though tissue, it disturbs the tissue as little as possible. In a preferred embodiment this angle is about 40°. In other preferred embodiments this angle ranges from 40° to 70°. - A
finger cot 320 is used to both isolate the front of the finger from tissue, provide a rounded surface at the front of the finger, which can be pushed through tissue with less chance of causing damage, and making it possible for aprobe unit 310 having a fixedinner diameter 324 to accommodate a range of finger thicknesses, by providing a range of cots having different thicknesses. It is desirable to minimize thedistance 318 betweenfinger cot 320 andprobe surface 322. Although this distance is shown as being on the order of 2 mm, in anotherpreferred embodiment distance 318 is zero, with thefinger cot 320 being flush with the probe surface. - This low profile and gradual protrusion greatly facilitates a probe user in inserting the probe into small body cavities and avoiding damage to delicate tissues. Along these lines it is beneficial to have a “bullet shaped” probe that comes to a point forward of the finger and smoothly expands to the area where the transponder is located. This can be accomplished by equipping the probe with a forward section that terminates distal to the finger tip in a single point and expands transversely outwardly approximately equally and smoothly in each direction, to yield the bullet shape.
- In one preferred embodiment a 128 element probe is constructed and in an alternative preferred embodiment a 256 element probe is constructed. The probe head is completed by adding a lens and housing. Skilled persons will recognize that although a linear array is shown, a curved linear array could be constructed just as easily, using the techniques shown, simply by curving the piezoelectric material after it is diced. In an alternative preferred method of construction, a separately formed ultrasound transceiver is connected to flex
circuit 40 by way of a flex circuit connective tab. - The use of a high
absorptive backing material 54, incorporated into the array, as well as a method of construction that obviates the need for connecting the flex circuit to a cable in the probe head permits the formation of a lower profile probe head. As noted elsewhere in this document, this low profile is critical in permitting a user to locate the probe in tight spaces internal to the human body without damaging body tissue. The benefit of this innovation may be utilized in probes that do not otherwise fit the disclosure of this application. For example,flex circuit 40, rather than terminating in connector-half 24, can be terminated at a multi-conductor coaxial cable, of the type that is currently standard in the ultrasound imaging industry, 5 cm or more away from the probe with or without a connector. In the typical current probe design, the multi-conductor coaxial cable terminates quite close to the probe head or in the probe head, causing the finger-mounted portion to be bulky and heavy. By extending the flex circuit portion more than 5 cm from the probe itself, and preferably more than 10 cm or even 20 cm, the finger-mounted portion is kept light and given a low profile. Accordingly, the present invention is not limited to the system connectors that although advantageous do not by themselves yield the low profile of the probe. - In an alternative preferred embodiment a capacitive micro-machined ultrasound transceiver (CMUT) is connected to
traces 50, using the same techniques as used for connectingpiezoelectric material 56. A CMUT transceiver tends to be thermally robust, thereby lending itself to use in a probe that may be exposed to the heat and pressure of an autoclave sterilization cycle, without being damaged. - Referring to
FIGS. 5A-5C , at theproximal end 42 ofwork piece 40, a set of electrical contact points 52 are formed by removing the flex circuit plastic down to eachtrace 50, in a particular spot. Conductive material is deposited ontocontacts 52, so that they are not recessed. Alternatively, a surface coating material covers flex traces so thatonly connector contacts 52 are left exposed on the surface offlex forming contacts 52.Rigid backing material 58 is adhered underneath the flex circuit and a metal housing (not shown) is provided to finished connector-half 22. Alternatively, the proximal end of the flex circuit can be selectively rigidized by laminating a rigid, circuit board material layer onto the flexible portion, and forming connections to the flex traces by laser or mechanical drilling and subsequent plating, to form a monolithic integrated connector assembly. - Referring to
FIG. 6 , in a preferred embodiment afinger probe 70 includes a set of accelerometers (not shown) and/orinductors 72 that are mounted in a mutually orthogonal pattern are provided as part offinger probe 30 to permit location determination whilefinger probe 30 is within the body and not directly observable. - Referring to
FIG. 7 in an additional preferred embodiment, ahypodermic needle 200 and an attachedsyringe 210 are releasably mountedadjacent finger probe 30. This permits imagery gathered byfinger probe 30 to assist a health care professional in finding a blood vessel of interest. Health care professionals sometime need to find a particular blood vessel, such as the jugular vein, in order to inject fluid or drugs as soon as possible so that the substance being injected will reach a target organ as quickly as possible. In such application, known as central-line-placement, color flow ultrasound imagery, in which Doppler flow information drives the display of the blood vessels and non-Doppler information drives the display for the surrounding tissue, is particularly useful in this endeavor. In an alternative preferred embodiment, another sort of skin broaching device, such as a canula (not shown) or a hypodermic needle connected to an intravenous drip bag is associated to the ultrasound probe. Guidance of the hypodermic needle associated with the finger probe may also be assisted by use of commercially available guidance devices, such as a pressure sensor associated with the needle, including that available from Vascular Technologies, Ness-Ziona, Israel, which provide an additional positive indication when the needle enters a vein, through sensing a pressure change. - An additional preferred embodiment is the same as described above except for that an
optical link 260 andlight source 262 is provided to permit optical viewing of body tissue. In one preferred embodiment the optical link 60 is in the form of a lens coupled to a fiber optic link onprobe 30 that may terminate in a video camera. Alternativelyoptic link 260 is in the form of a video camera (as shown) attached to thefinger probe 30 and adapted to communicate electrically with theimaging station 12, or heads updisplay 34. In either situation it is necessary to provide light for theoptical link 260. This is accomplished either by an electrically powered light source, such as alight emitting diode 262, or a chemically powered light source (not shown), such as those available under the trade name “pin lights,” from Embo-Optics of Beverly, Mass. - Referring to
FIG. 9 , in another preferred embodiment a finger probe, such as 30, is equipped with a sensor suite that includes athermometer 280, anoximeter 282, apressure sensor 284 and aglucometer 286. In analternative embodiment element 286 is anagent administration patch 286 that is electrically activated by atrace 50 to express the agent, thereby administering the agent to a precise location. In an alternative preferred embodiment, a smaller set of sensors is provided, or even a single sensor only. - In another preferred embodiment, a finger assembly 130 is provided that can both image tissue, using ultrasound, and that can also provide therapy, typically by cauterizing tissue, also using ultrasound. First there is an
assembly 288 that includes both animaging array 292 and atreatment array 294. The treatment array uses up to 100 watts of power and is powered by traces that are larger in cross-sectional dimension and are therefore capable of conducting more current in order to meet the greater power demands oftreatment array 294. In an alternative embodiment a smaller number of sensors, or just one sensor, are available. - In another preferred embodiment of an ultrasound assembly (not shown), a single array is used for both imaging and treatment. In one variant if this embodiment, some piezoelectric elements are used for both imaging and treatment and others are used solely for imaging. Again, the array must be powered by a larger input of current and to accommodate this need, larger cross-section traces 40 (
FIG. 5A ) are provided for the treatment ultrasound elements. - A set of thumb controls 290 are provided for
probe 288, so that the user may switch between imaging and treatment. These controls are typically in the form of a small push button that must be pressed in a specific pattern, for example two rapid presses followed by continuous pressure during the period of time treatment is desired, in order to activate treatment mode, as any inadvertent activation could greatly harm a patient. In one preferred embodiment a warning signal is given when two rapid presses have placed the treatment probe in a “ready” state, in case some passage through tissue ever causes two rapid presses to occur. In an alternative preferred embodiment controls are placed on the wrist orforearm band 22, thereby providing easy access for a probe user. - In another preferred embodiment,
buttons 290 are provided for a probe, such asprobe 30, in which therapeutic ultrasound is not available. The buttons are instrumented to change the scan width and orientation; the transmit power and frequency; and imaging mode among other quantities. Thebuttons 290 communicate withimaging station 12 by way oftraces 50 andcables FIG. 3 . Thebuttons 290 may also communicate or be mechanically associated with the array within the finger probe to allow a change in orientation of the array elements to effect the orientation of the scan plane. - One use of
probe 30 is for the intra-operative evaluation of plaque deposits in the aortal arch and ascending aorta, prior to accessing the aorta. To perform this function a Doppler probe may be used and a measurement of the speed of the blood in the aorta formed. In the case where the aorta has been narrowed due to plaque deposits, the blood flows more rapidly. The accessing of the tissue of the aorta is greatly eased by use of a finger mounted probe, as opposed to the long, stiff intra-operative probes currently available. - While a number of exemplary aspects and embodiments have been discussed above, those of skill in the art will recognize certain modifications, permutations, additions and sub-combinations thereof. It is therefore intended that the following appended claims and claims hereafter introduced are interpreted to include all such modifications, permutations, additions and sub-combinations as are within their true spirit and scope.
Claims (14)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/895,610 US20080306387A1 (en) | 2007-04-13 | 2007-08-23 | Finger mounted imaging and sensing assembly |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US92332307P | 2007-04-13 | 2007-04-13 | |
| US11/895,610 US20080306387A1 (en) | 2007-04-13 | 2007-08-23 | Finger mounted imaging and sensing assembly |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| US20080306387A1 true US20080306387A1 (en) | 2008-12-11 |
Family
ID=40089046
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US11/895,610 Abandoned US20080306387A1 (en) | 2007-04-13 | 2007-08-23 | Finger mounted imaging and sensing assembly |
| US11/895,613 Abandoned US20080300489A1 (en) | 2007-04-13 | 2007-08-24 | Cable and connector system for an ultrasound probe |
| US11/895,607 Expired - Lifetime US8211026B2 (en) | 2002-11-27 | 2007-08-24 | Finger mounted probe adapted for intraoperative use |
| US11/895,612 Abandoned US20110105908A1 (en) | 2007-04-13 | 2007-08-24 | Finger mounted imaging probe and skin broaching assembly |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US11/895,613 Abandoned US20080300489A1 (en) | 2007-04-13 | 2007-08-24 | Cable and connector system for an ultrasound probe |
| US11/895,607 Expired - Lifetime US8211026B2 (en) | 2002-11-27 | 2007-08-24 | Finger mounted probe adapted for intraoperative use |
| US11/895,612 Abandoned US20110105908A1 (en) | 2007-04-13 | 2007-08-24 | Finger mounted imaging probe and skin broaching assembly |
Country Status (1)
| Country | Link |
|---|---|
| US (4) | US20080306387A1 (en) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110290833A1 (en) * | 2010-06-01 | 2011-12-01 | Rosalie Rachel Koerner | Hand Tool Cord Tether and Method |
| WO2014070393A1 (en) * | 2012-10-30 | 2014-05-08 | Medicametrix, Inc. | Prostate glove |
| US8838214B2 (en) | 2012-10-30 | 2014-09-16 | Medicametrix, Inc. | Finger clip for prostate glove |
| USD735869S1 (en) | 2011-11-15 | 2015-08-04 | Fluke Corporation | Finger probe device |
| USD739948S1 (en) * | 2013-05-29 | 2015-09-29 | Ken Purfey | Combined flower-designed ultrasound thimblette and fingertip medical device |
| USD743040S1 (en) * | 2014-03-11 | 2015-11-10 | Sonivate Medical, Inc. | Wearable ultrasound probe |
| US9402564B2 (en) | 2012-10-30 | 2016-08-02 | Medicametrix, Inc. | Prostate glove with measurement grid |
| US9402547B2 (en) | 2012-10-30 | 2016-08-02 | Medicametrix, Inc. | Prostate glove with receiver fibers |
| US9538952B2 (en) | 2012-10-30 | 2017-01-10 | Medicametrix, Inc. | Controller for measuring prostate volume |
| WO2017019873A1 (en) * | 2015-07-30 | 2017-02-02 | Hossack John A | Compact fingertip-manipulated ultrasound imaging |
| US11413018B2 (en) | 2017-09-13 | 2022-08-16 | Bard Access Systems, Inc. | Ultrasound finger probe |
| US11638552B2 (en) | 2015-12-22 | 2023-05-02 | Medicametrix, Inc. | Prostate glove, fingertip optical encoder, connector system, and related methods |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8641608B2 (en) * | 2005-04-08 | 2014-02-04 | Ethicon Endo-Surgery, Inc. | Manifold for laparoscopic seal assembly |
| US10004476B2 (en) * | 2008-08-01 | 2018-06-26 | Esaote S.P.A. | Portable ultrasound system alternatively attachable to table base and forearm contact part |
| JP5826478B2 (en) * | 2010-10-28 | 2015-12-02 | 日立アロカメディカル株式会社 | Tissue insertion type ultrasonic probe |
| US20130085325A1 (en) * | 2011-08-22 | 2013-04-04 | Bradbury Fuller | Hand-mounted, video-guided system for treating peritonitis and other medical conditions |
| CN102968076A (en) * | 2011-08-31 | 2013-03-13 | Ge医疗系统环球技术有限公司 | Controller for controlling operation of ultrasonic diagnosis detector |
| KR101356407B1 (en) * | 2012-03-08 | 2014-01-27 | 박기영 | Ultrasonic probe equipped with auxiliary monitor and ultrasonic diagnosis apparatus |
| JP6019671B2 (en) * | 2012-03-30 | 2016-11-02 | セイコーエプソン株式会社 | Ultrasonic probe, electronic device, and ultrasonic diagnostic apparatus |
| EP2890316A4 (en) * | 2012-08-30 | 2016-08-10 | Human Extensions Ltd | Interface between user and laparoscopic tools |
| US20140330087A1 (en) * | 2013-05-01 | 2014-11-06 | Medsensation, Inc. | Devices and methods for obtaining physiological data |
| US20150094585A1 (en) * | 2013-09-30 | 2015-04-02 | Konica Minolta Laboratory U.S.A., Inc. | Ultrasound transducer with position memory for medical imaging |
| US10349888B2 (en) | 2013-10-08 | 2019-07-16 | Carlos Federico Muniz | Wearable electroencephalography device and methods of use thereof |
| US9986970B2 (en) * | 2013-12-31 | 2018-06-05 | General Electric Company | Apparatus and method for aiding extremity ultrasonography |
| ES2643574T3 (en) * | 2014-03-05 | 2017-11-23 | Markantus Ag | Device worn on the finger to provide user inputs |
| US20150257733A1 (en) * | 2014-03-11 | 2015-09-17 | Sonivate Medical, Inc. | Wearable imaging system |
| US9827060B2 (en) * | 2014-07-15 | 2017-11-28 | Synaptive Medical (Barbados) Inc. | Medical device control interface |
| EP3277165A1 (en) * | 2015-03-31 | 2018-02-07 | Marcio Marc Abreu | Wearable devices configured to support measurement and transmission apparatus |
| KR102478248B1 (en) | 2016-09-23 | 2022-12-19 | 삼성메디슨 주식회사 | Diagnostic apparatus of obstetric and gynecologic and diagnostic method of obstetric and gynecologic using the same |
| EP3629973A4 (en) * | 2017-05-26 | 2021-01-27 | Covidien LP | Controller for imaging device |
| US11051787B2 (en) | 2017-08-25 | 2021-07-06 | Samsung Medison Co., Ltd. | Ultrasound diagnosis apparatus connected to wireless ultrasound probes and method of operating the same |
| US11026657B2 (en) | 2017-08-25 | 2021-06-08 | Samsung Medison Co., Ltd. | Ultrasound diagnosis apparatus and method of operating the same |
| EP3993855A1 (en) * | 2019-07-16 | 2022-05-11 | University of Miami | Device for arterial puncture assistance |
| KR20220079980A (en) * | 2019-10-17 | 2022-06-14 | 베라톤 인코포레이티드 | Systems and methods for ultrasound scanning |
| IT202000004237A1 (en) * | 2020-02-28 | 2021-08-28 | Gaetano Ricignolo | AN ULTRASOUND PROBE WEARABLE BY AN OPERATOR |
| EP4137060A1 (en) * | 2021-08-17 | 2023-02-22 | Thinkin Management Limited | Curved ultrasound probe |
| WO2024163449A1 (en) * | 2023-01-30 | 2024-08-08 | Medicametrix, Inc. | Prostate measurement system |
Citations (72)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US454386A (en) * | 1891-06-16 | George i-i | ||
| US560419A (en) * | 1896-05-19 | Dental forceps | ||
| US4003621A (en) * | 1975-06-16 | 1977-01-18 | Technical Wire Products, Inc. | Electrical connector employing conductive rectilinear elements |
| US4250894A (en) * | 1978-11-14 | 1981-02-17 | Yeda Research & Development Co., Ltd. | Instrument for viscoelastic measurement |
| US4407295A (en) * | 1980-10-16 | 1983-10-04 | Dna Medical, Inc. | Miniature physiological monitor with interchangeable sensors |
| US4545386A (en) * | 1982-05-21 | 1985-10-08 | Siemens Ag | Manually operated ultrasound application |
| US4671292A (en) * | 1985-04-30 | 1987-06-09 | Dymax Corporation | Concentric biopsy probe |
| US4693529A (en) * | 1986-03-31 | 1987-09-15 | Amp Incorporated | Elastomeric mother-daughter board electrical connector |
| US4779244A (en) * | 1983-05-02 | 1988-10-18 | General Electric Company | Ultrasonic transducer and attenuating material for use therein |
| US4913656A (en) * | 1989-04-07 | 1990-04-03 | Rogers Corporation | Electrical connector |
| US4940413A (en) * | 1989-07-26 | 1990-07-10 | Hewlett-Packard Company | Electrical make/break interconnect having high trace density |
| US4972839A (en) * | 1988-12-22 | 1990-11-27 | Angelsen Bjorn A J | Miniaturized mechanically-steerable ultrasonic probe |
| US5026291A (en) * | 1990-08-10 | 1991-06-25 | E. I. Du Pont De Nemours And Company | Board mounted connector system |
| US5088500A (en) * | 1989-11-22 | 1992-02-18 | Victor J. Wedel | Ultrasound finger probe and method for use |
| US5123852A (en) * | 1991-05-17 | 1992-06-23 | International Business Machines Corporation | Modular electrical connector |
| US5152293A (en) * | 1991-07-01 | 1992-10-06 | Northwestern University | Finger-mounted intraoperative imaging device |
| US5195519A (en) * | 1988-12-22 | 1993-03-23 | Angelsen Bjorn A J | Miniaturized mechanically-steerable ultrasonic probe |
| US5199881A (en) * | 1991-12-03 | 1993-04-06 | Hughes Aircraft Company | Hermaphroditic interconnection of circuit boards |
| US5265329A (en) * | 1991-06-12 | 1993-11-30 | Amp Incorporated | Fiber-filled elastomeric connector attachment method and product |
| US5284147A (en) * | 1989-05-22 | 1994-02-08 | Hitachi Medical Corporation | Ultrasonic probe to be installed on fingertip |
| US5372512A (en) * | 1993-04-30 | 1994-12-13 | Hewlett-Packard Company | Electrical interconnect system for a flexible circuit |
| US5381795A (en) * | 1993-11-19 | 1995-01-17 | Advanced Technology Laboratories, Inc. | Intraoperative ultrasound probe |
| US5385477A (en) * | 1993-07-30 | 1995-01-31 | Ck Technologies, Inc. | Contactor with elastomer encapsulated probes |
| US5403194A (en) * | 1992-07-17 | 1995-04-04 | Shin-Etsu Polymer Co., Ltd. | Elastic interconnector |
| US5413107A (en) * | 1994-02-16 | 1995-05-09 | Tetrad Corporation | Ultrasonic probe having articulated structure and rotatable transducer head |
| US5452717A (en) * | 1993-07-14 | 1995-09-26 | Masimo Corporation | Finger-cot probe |
| US5461482A (en) * | 1993-04-30 | 1995-10-24 | Hewlett-Packard Company | Electrical interconnect system for a printer |
| US5505205A (en) * | 1993-01-08 | 1996-04-09 | Hewlett-Packard Company | Interface element for medical ultrasound transducer |
| US5573409A (en) * | 1991-10-17 | 1996-11-12 | Itt Corporation | Interconnector |
| US5598194A (en) * | 1993-04-30 | 1997-01-28 | Hewlett-Packard Company | Wiping structure for cleaning electrical contacts for a printer and ink cartridge |
| US5597982A (en) * | 1994-03-06 | 1997-01-28 | Hewlett-Packard Company | Electrical connection structure |
| US5598846A (en) * | 1995-12-21 | 1997-02-04 | Hewlett-Packard Company | Rotatable ultrasound transducer finger probe |
| US5606424A (en) * | 1994-07-26 | 1997-02-25 | Samsung Electronics Co., Ltd. | Simple high-band record modulation circuit in 8MM video tape recorder |
| US5604976A (en) * | 1994-10-18 | 1997-02-25 | Pi Medical Corporation | Method of making percutaneous connector for multi-conductor electrical cables |
| US5630419A (en) * | 1994-12-20 | 1997-05-20 | Tetrad Corporation | Sealing connector for multiconductor cables |
| US5671747A (en) * | 1996-01-24 | 1997-09-30 | Hewlett-Packard Company | Ultrasound probe having interchangeable accessories |
| US5678551A (en) * | 1996-05-21 | 1997-10-21 | Hewlett-Packard Company | Sterilizable ultrasound probe |
| US5752517A (en) * | 1996-10-18 | 1998-05-19 | Advanced Technology Laboratories, Inc. | Intraoperative ultrasound probes for ultrasonic examination during surgery |
| US5795299A (en) * | 1997-01-31 | 1998-08-18 | Acuson Corporation | Ultrasonic transducer assembly with extended flexible circuits |
| US5805425A (en) * | 1996-09-24 | 1998-09-08 | Texas Instruments Incorporated | Microelectronic assemblies including Z-axis conductive films |
| US5805424A (en) * | 1996-09-24 | 1998-09-08 | Texas Instruments Incorporated | Microelectronic assemblies including Z-axis conductive films |
| US5805426A (en) * | 1996-09-24 | 1998-09-08 | Texas Instruments Incorporated | Microelectronic assemblies including Z-axis conductive films |
| US5810733A (en) * | 1996-05-07 | 1998-09-22 | Acuson Corporation | Encapsulated ultrasound transducer probe assembly |
| US5818700A (en) * | 1996-09-24 | 1998-10-06 | Texas Instruments Incorporated | Microelectronic assemblies including Z-axis conductive films |
| US5846097A (en) * | 1995-10-04 | 1998-12-08 | Acuson Corporation | Submersible connector system |
| US5873828A (en) * | 1994-02-18 | 1999-02-23 | Olympus Optical Co., Ltd. | Ultrasonic diagnosis and treatment system |
| US5904580A (en) * | 1997-02-06 | 1999-05-18 | Methode Electronics, Inc. | Elastomeric connector having a plurality of fine pitched contacts, a method for connecting components using the same and a method for manufacturing such a connector |
| US6024579A (en) * | 1998-05-29 | 2000-02-15 | The Whitaker Corporation | Electrical connector having buckling beam contacts |
| US6029530A (en) * | 1997-07-25 | 2000-02-29 | General Electric Company | Finger controlled inspection apparatus |
| US6052286A (en) * | 1997-04-11 | 2000-04-18 | Texas Instruments Incorporated | Restrained center core anisotropically conductive adhesive |
| US6097033A (en) * | 1996-10-21 | 2000-08-01 | Gsf-Forschungszentrum Fur Umwelt Und Gesundheit Gmbh | Dosimeter probe |
| US6106305A (en) * | 1997-02-06 | 2000-08-22 | Methode Electronics, Inc. | Elastomeric connector having a plurality of fine pitched contacts, a method for connecting components using the same and a method for manufacturing such a connector |
| US6117084A (en) * | 1998-11-17 | 2000-09-12 | Atl Ultrasound, Inc. | Ultrasonic probe connector enclosure |
| US6123551A (en) * | 1998-10-06 | 2000-09-26 | Northern Telecom Limited | Electronic circuit interconnection method and apparatus |
| US6169914B1 (en) * | 1998-01-13 | 2001-01-02 | Urometrics, Inc. | Devices and methods for monitoring female arousal |
| US6182341B1 (en) * | 1995-06-07 | 2001-02-06 | Acuson Corporation | Method of manufacturing an improved coupling of acoustic window and lens for medical ultrasound transducers |
| US20010031923A1 (en) * | 2000-03-02 | 2001-10-18 | Seward James B. | Apparatus and method of holding and manipulating small ultrasound transducers |
| US6309358B1 (en) * | 1998-03-05 | 2001-10-30 | Terumo Kabushiki Kaisha | Tube unit system including an adapter interposed between a connector and a connecting part |
| US6350132B1 (en) * | 1998-11-23 | 2002-02-26 | Glatts, Iii George F. | Elastomeric connector and associated method of manufacture |
| US6358064B2 (en) * | 1999-03-29 | 2002-03-19 | Delphi Technologies, Inc. | Z-axis electrical interconnect |
| US20030167002A1 (en) * | 2000-08-24 | 2003-09-04 | Ron Nagar | Photoacoustic assay and imaging system |
| US6671531B2 (en) * | 1999-12-09 | 2003-12-30 | Masimo Corporation | Sensor wrap including foldable applicator |
| US6726635B1 (en) * | 2000-05-12 | 2004-04-27 | Lasala Anthony F. | Cardiac impulse detector |
| US6746402B2 (en) * | 2002-01-02 | 2004-06-08 | E. Tuncay Ustuner | Ultrasound system and method |
| US20040138569A1 (en) * | 1999-08-20 | 2004-07-15 | Sorin Grunwald | User interface for handheld imaging devices |
| US6780154B2 (en) * | 2002-01-17 | 2004-08-24 | Siemens Medical Solutions Usa, Inc. | Segmented handheld medical ultrasound system and method |
| US20040225217A1 (en) * | 2003-02-14 | 2004-11-11 | Voegele James W. | Fingertip ultrasound medical instrument |
| US20050085730A1 (en) * | 2003-10-21 | 2005-04-21 | Aime Flesch | Bi-plane ultrasonic probe |
| US20050085731A1 (en) * | 2003-10-21 | 2005-04-21 | Miller David G. | Ultrasound transducer finger probe |
| US20050096554A1 (en) * | 2002-11-27 | 2005-05-05 | Dudik Evan M. | Acoustic medical sensor for ultrasound imaging |
| US20060025690A1 (en) * | 2004-07-27 | 2006-02-02 | Guigne Jacques Y | Acoustic body examination |
| US7037270B2 (en) * | 2000-03-02 | 2006-05-02 | Mayo Foundation For Medical Education And Research | Small ultrasound transducers |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ATE132720T1 (en) * | 1990-07-18 | 1996-01-15 | Avl Medical Instr Ag | DEVICE AND METHOD FOR MEASURING BLOOD PRESSURE |
| NL9001755A (en) * | 1990-08-02 | 1992-03-02 | Optische Ind De Oude Delft Nv | ENDOSCOPIC SCANNER. |
| US5285948A (en) * | 1992-04-30 | 1994-02-15 | Maxtor Corporation | Reflow solder and static test station |
| DE69520090T2 (en) * | 1994-12-22 | 2001-08-23 | The Whitaker Corp., Wilmington | Electrical cable for use in a medical surgical environment |
| US5549004A (en) * | 1995-02-28 | 1996-08-27 | Nugent; Michael J. | Hand held tube wall thickness ultrasonic measurement probe and system |
| US5797849A (en) * | 1995-03-28 | 1998-08-25 | Sonometrics Corporation | Method for carrying out a medical procedure using a three-dimensional tracking and imaging system |
| US6126608A (en) * | 1999-05-18 | 2000-10-03 | Pie Medical Equipment B.V. | Portable ultrasound diagnostic system with handsfree display |
| EP1599121A4 (en) * | 2002-11-27 | 2007-10-10 | Blacktoe Medical Iii Inc | Immersible ultrasound probe and cable |
-
2007
- 2007-08-23 US US11/895,610 patent/US20080306387A1/en not_active Abandoned
- 2007-08-24 US US11/895,613 patent/US20080300489A1/en not_active Abandoned
- 2007-08-24 US US11/895,607 patent/US8211026B2/en not_active Expired - Lifetime
- 2007-08-24 US US11/895,612 patent/US20110105908A1/en not_active Abandoned
Patent Citations (76)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US560419A (en) * | 1896-05-19 | Dental forceps | ||
| US454386A (en) * | 1891-06-16 | George i-i | ||
| US4003621A (en) * | 1975-06-16 | 1977-01-18 | Technical Wire Products, Inc. | Electrical connector employing conductive rectilinear elements |
| US4250894A (en) * | 1978-11-14 | 1981-02-17 | Yeda Research & Development Co., Ltd. | Instrument for viscoelastic measurement |
| US4407295A (en) * | 1980-10-16 | 1983-10-04 | Dna Medical, Inc. | Miniature physiological monitor with interchangeable sensors |
| US4545386A (en) * | 1982-05-21 | 1985-10-08 | Siemens Ag | Manually operated ultrasound application |
| US4779244A (en) * | 1983-05-02 | 1988-10-18 | General Electric Company | Ultrasonic transducer and attenuating material for use therein |
| US4671292A (en) * | 1985-04-30 | 1987-06-09 | Dymax Corporation | Concentric biopsy probe |
| US4693529A (en) * | 1986-03-31 | 1987-09-15 | Amp Incorporated | Elastomeric mother-daughter board electrical connector |
| US5195519A (en) * | 1988-12-22 | 1993-03-23 | Angelsen Bjorn A J | Miniaturized mechanically-steerable ultrasonic probe |
| US4972839A (en) * | 1988-12-22 | 1990-11-27 | Angelsen Bjorn A J | Miniaturized mechanically-steerable ultrasonic probe |
| US4913656A (en) * | 1989-04-07 | 1990-04-03 | Rogers Corporation | Electrical connector |
| US5284147A (en) * | 1989-05-22 | 1994-02-08 | Hitachi Medical Corporation | Ultrasonic probe to be installed on fingertip |
| US4940413A (en) * | 1989-07-26 | 1990-07-10 | Hewlett-Packard Company | Electrical make/break interconnect having high trace density |
| US5088500A (en) * | 1989-11-22 | 1992-02-18 | Victor J. Wedel | Ultrasound finger probe and method for use |
| US5026291A (en) * | 1990-08-10 | 1991-06-25 | E. I. Du Pont De Nemours And Company | Board mounted connector system |
| US5123852A (en) * | 1991-05-17 | 1992-06-23 | International Business Machines Corporation | Modular electrical connector |
| US5265329A (en) * | 1991-06-12 | 1993-11-30 | Amp Incorporated | Fiber-filled elastomeric connector attachment method and product |
| US5152293A (en) * | 1991-07-01 | 1992-10-06 | Northwestern University | Finger-mounted intraoperative imaging device |
| US5573409A (en) * | 1991-10-17 | 1996-11-12 | Itt Corporation | Interconnector |
| US5199881A (en) * | 1991-12-03 | 1993-04-06 | Hughes Aircraft Company | Hermaphroditic interconnection of circuit boards |
| US5403194A (en) * | 1992-07-17 | 1995-04-04 | Shin-Etsu Polymer Co., Ltd. | Elastic interconnector |
| US5482047A (en) * | 1992-11-23 | 1996-01-09 | Advanced Technology Laboratories, Inc. | Intraoperative ultrasound probe |
| US5505205A (en) * | 1993-01-08 | 1996-04-09 | Hewlett-Packard Company | Interface element for medical ultrasound transducer |
| US5372512A (en) * | 1993-04-30 | 1994-12-13 | Hewlett-Packard Company | Electrical interconnect system for a flexible circuit |
| US5533904A (en) * | 1993-04-30 | 1996-07-09 | Hewlett-Packard Company | Electrical interconnect system for multiple flexible circuits |
| US5598194A (en) * | 1993-04-30 | 1997-01-28 | Hewlett-Packard Company | Wiping structure for cleaning electrical contacts for a printer and ink cartridge |
| US5461482A (en) * | 1993-04-30 | 1995-10-24 | Hewlett-Packard Company | Electrical interconnect system for a printer |
| US5452717A (en) * | 1993-07-14 | 1995-09-26 | Masimo Corporation | Finger-cot probe |
| US5385477A (en) * | 1993-07-30 | 1995-01-31 | Ck Technologies, Inc. | Contactor with elastomer encapsulated probes |
| US5381795A (en) * | 1993-11-19 | 1995-01-17 | Advanced Technology Laboratories, Inc. | Intraoperative ultrasound probe |
| US5413107A (en) * | 1994-02-16 | 1995-05-09 | Tetrad Corporation | Ultrasonic probe having articulated structure and rotatable transducer head |
| US5873828A (en) * | 1994-02-18 | 1999-02-23 | Olympus Optical Co., Ltd. | Ultrasonic diagnosis and treatment system |
| US5597982A (en) * | 1994-03-06 | 1997-01-28 | Hewlett-Packard Company | Electrical connection structure |
| US5606424A (en) * | 1994-07-26 | 1997-02-25 | Samsung Electronics Co., Ltd. | Simple high-band record modulation circuit in 8MM video tape recorder |
| US5782645A (en) * | 1994-10-18 | 1998-07-21 | Pi Medical Corporation | Percutaneous connector for multi-conductor electrical cables |
| US5604976A (en) * | 1994-10-18 | 1997-02-25 | Pi Medical Corporation | Method of making percutaneous connector for multi-conductor electrical cables |
| US5630419A (en) * | 1994-12-20 | 1997-05-20 | Tetrad Corporation | Sealing connector for multiconductor cables |
| US6182341B1 (en) * | 1995-06-07 | 2001-02-06 | Acuson Corporation | Method of manufacturing an improved coupling of acoustic window and lens for medical ultrasound transducers |
| US5913688A (en) * | 1995-10-04 | 1999-06-22 | Acuson Corporation | Submersible connector system |
| US5846097A (en) * | 1995-10-04 | 1998-12-08 | Acuson Corporation | Submersible connector system |
| US5598846A (en) * | 1995-12-21 | 1997-02-04 | Hewlett-Packard Company | Rotatable ultrasound transducer finger probe |
| US5671747A (en) * | 1996-01-24 | 1997-09-30 | Hewlett-Packard Company | Ultrasound probe having interchangeable accessories |
| US5810733A (en) * | 1996-05-07 | 1998-09-22 | Acuson Corporation | Encapsulated ultrasound transducer probe assembly |
| US5678551A (en) * | 1996-05-21 | 1997-10-21 | Hewlett-Packard Company | Sterilizable ultrasound probe |
| US5818700A (en) * | 1996-09-24 | 1998-10-06 | Texas Instruments Incorporated | Microelectronic assemblies including Z-axis conductive films |
| US5805424A (en) * | 1996-09-24 | 1998-09-08 | Texas Instruments Incorporated | Microelectronic assemblies including Z-axis conductive films |
| US5805425A (en) * | 1996-09-24 | 1998-09-08 | Texas Instruments Incorporated | Microelectronic assemblies including Z-axis conductive films |
| US5805426A (en) * | 1996-09-24 | 1998-09-08 | Texas Instruments Incorporated | Microelectronic assemblies including Z-axis conductive films |
| US5752517A (en) * | 1996-10-18 | 1998-05-19 | Advanced Technology Laboratories, Inc. | Intraoperative ultrasound probes for ultrasonic examination during surgery |
| US6097033A (en) * | 1996-10-21 | 2000-08-01 | Gsf-Forschungszentrum Fur Umwelt Und Gesundheit Gmbh | Dosimeter probe |
| US5795299A (en) * | 1997-01-31 | 1998-08-18 | Acuson Corporation | Ultrasonic transducer assembly with extended flexible circuits |
| US6106305A (en) * | 1997-02-06 | 2000-08-22 | Methode Electronics, Inc. | Elastomeric connector having a plurality of fine pitched contacts, a method for connecting components using the same and a method for manufacturing such a connector |
| US5904580A (en) * | 1997-02-06 | 1999-05-18 | Methode Electronics, Inc. | Elastomeric connector having a plurality of fine pitched contacts, a method for connecting components using the same and a method for manufacturing such a connector |
| US6052286A (en) * | 1997-04-11 | 2000-04-18 | Texas Instruments Incorporated | Restrained center core anisotropically conductive adhesive |
| US6029530A (en) * | 1997-07-25 | 2000-02-29 | General Electric Company | Finger controlled inspection apparatus |
| US6169914B1 (en) * | 1998-01-13 | 2001-01-02 | Urometrics, Inc. | Devices and methods for monitoring female arousal |
| US6309358B1 (en) * | 1998-03-05 | 2001-10-30 | Terumo Kabushiki Kaisha | Tube unit system including an adapter interposed between a connector and a connecting part |
| US6024579A (en) * | 1998-05-29 | 2000-02-15 | The Whitaker Corporation | Electrical connector having buckling beam contacts |
| US6123551A (en) * | 1998-10-06 | 2000-09-26 | Northern Telecom Limited | Electronic circuit interconnection method and apparatus |
| US6117084A (en) * | 1998-11-17 | 2000-09-12 | Atl Ultrasound, Inc. | Ultrasonic probe connector enclosure |
| US6350132B1 (en) * | 1998-11-23 | 2002-02-26 | Glatts, Iii George F. | Elastomeric connector and associated method of manufacture |
| US6358064B2 (en) * | 1999-03-29 | 2002-03-19 | Delphi Technologies, Inc. | Z-axis electrical interconnect |
| US20040138569A1 (en) * | 1999-08-20 | 2004-07-15 | Sorin Grunwald | User interface for handheld imaging devices |
| US6671531B2 (en) * | 1999-12-09 | 2003-12-30 | Masimo Corporation | Sensor wrap including foldable applicator |
| US20010031923A1 (en) * | 2000-03-02 | 2001-10-18 | Seward James B. | Apparatus and method of holding and manipulating small ultrasound transducers |
| US7037270B2 (en) * | 2000-03-02 | 2006-05-02 | Mayo Foundation For Medical Education And Research | Small ultrasound transducers |
| US6726635B1 (en) * | 2000-05-12 | 2004-04-27 | Lasala Anthony F. | Cardiac impulse detector |
| US20030167002A1 (en) * | 2000-08-24 | 2003-09-04 | Ron Nagar | Photoacoustic assay and imaging system |
| US6746402B2 (en) * | 2002-01-02 | 2004-06-08 | E. Tuncay Ustuner | Ultrasound system and method |
| US6780154B2 (en) * | 2002-01-17 | 2004-08-24 | Siemens Medical Solutions Usa, Inc. | Segmented handheld medical ultrasound system and method |
| US20050096554A1 (en) * | 2002-11-27 | 2005-05-05 | Dudik Evan M. | Acoustic medical sensor for ultrasound imaging |
| US20040225217A1 (en) * | 2003-02-14 | 2004-11-11 | Voegele James W. | Fingertip ultrasound medical instrument |
| US20050085730A1 (en) * | 2003-10-21 | 2005-04-21 | Aime Flesch | Bi-plane ultrasonic probe |
| US20050085731A1 (en) * | 2003-10-21 | 2005-04-21 | Miller David G. | Ultrasound transducer finger probe |
| US20060025690A1 (en) * | 2004-07-27 | 2006-02-02 | Guigne Jacques Y | Acoustic body examination |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110290833A1 (en) * | 2010-06-01 | 2011-12-01 | Rosalie Rachel Koerner | Hand Tool Cord Tether and Method |
| USD735869S1 (en) | 2011-11-15 | 2015-08-04 | Fluke Corporation | Finger probe device |
| WO2014070393A1 (en) * | 2012-10-30 | 2014-05-08 | Medicametrix, Inc. | Prostate glove |
| US8838214B2 (en) | 2012-10-30 | 2014-09-16 | Medicametrix, Inc. | Finger clip for prostate glove |
| US9402564B2 (en) | 2012-10-30 | 2016-08-02 | Medicametrix, Inc. | Prostate glove with measurement grid |
| US9402547B2 (en) | 2012-10-30 | 2016-08-02 | Medicametrix, Inc. | Prostate glove with receiver fibers |
| US9538952B2 (en) | 2012-10-30 | 2017-01-10 | Medicametrix, Inc. | Controller for measuring prostate volume |
| USD739948S1 (en) * | 2013-05-29 | 2015-09-29 | Ken Purfey | Combined flower-designed ultrasound thimblette and fingertip medical device |
| USD743040S1 (en) * | 2014-03-11 | 2015-11-10 | Sonivate Medical, Inc. | Wearable ultrasound probe |
| WO2017019873A1 (en) * | 2015-07-30 | 2017-02-02 | Hossack John A | Compact fingertip-manipulated ultrasound imaging |
| US11638552B2 (en) | 2015-12-22 | 2023-05-02 | Medicametrix, Inc. | Prostate glove, fingertip optical encoder, connector system, and related methods |
| US11413018B2 (en) | 2017-09-13 | 2022-08-16 | Bard Access Systems, Inc. | Ultrasound finger probe |
Also Published As
| Publication number | Publication date |
|---|---|
| US8211026B2 (en) | 2012-07-03 |
| US20080300488A1 (en) | 2008-12-04 |
| US20110105908A1 (en) | 2011-05-05 |
| US20080300489A1 (en) | 2008-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8211026B2 (en) | Finger mounted probe adapted for intraoperative use | |
| US7037270B2 (en) | Small ultrasound transducers | |
| KR102617407B1 (en) | Endoscope with variable profile tip | |
| KR102302934B1 (en) | Systems And Methods For Interventional Procedure Planning | |
| JP5774596B2 (en) | Visual tracking / annotation of clinically important anatomical landmarks for surgical intervention | |
| EP3560412A1 (en) | Fully integrated, disposable tissue visualization device | |
| US10238367B2 (en) | Devices, systems, and methods for targeted cannulation | |
| JP2014050727A (en) | Method and apparatus for guiding and positioning intravascular device | |
| EP2934325B1 (en) | Introducer having a flow sensor | |
| WO2007041678A3 (en) | Dc magnetic-based position and orientation monitoring system for tracking medical instruments | |
| JP2016503679A (en) | Steerable intravascular device, and related devices, systems, and methods | |
| US20120323124A1 (en) | Probe with dorsal connectivity | |
| WO2010047678A1 (en) | A versatile ultrasound probe and method for its use | |
| US6036645A (en) | Ultrasonic probe | |
| US20010031924A1 (en) | Small ultrasound transducers | |
| US10856841B1 (en) | Ultrasonic imaging probe | |
| Stassen et al. | Developments in minimally invasive surgery and interventional techniques (MISIT) | |
| US20070276287A1 (en) | Catheter | |
| US20240081943A1 (en) | Handheld tool extender | |
| US20220280135A1 (en) | Endoscope or catheter assemblies including two or more exit ports | |
| CN210582627U (en) | Treatment tool for endoscope | |
| JP2024531429A (en) | Curved Ultrasound Probe | |
| Banerjee et al. | OmniFlex: omnidirectional flexible hand-held endoscopic manipulator with spheroidal joint | |
| WO2023220673A1 (en) | A visual interface for a system used to determine tissue characteristics | |
| CN117835915A (en) | Sequential adapter for ultrasound and photoacoustic combined diagnostic exploration of left innominate vein |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AS | Assignment |
Owner name: BLACKTOE MEDICAL III, INC., OREGON Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:SCHUTZ, RONALD W.;CORBETT, SCOTT S., III;BATES, KENNETH N.;AND OTHERS;REEL/FRAME:021726/0103;SIGNING DATES FROM 20080721 TO 20080924 Owner name: BLACKTOE MEDICAL III, INC., OREGON Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:SCHUTZ, RONALD W.;CORBETT, SCOTT S., III;BATES, KENNETH N.;AND OTHERS;SIGNING DATES FROM 20080721 TO 20080924;REEL/FRAME:021726/0103 |
|
| AS | Assignment |
Owner name: US ARMY, SECRETARY OF THE ARMY, MARYLAND Free format text: CONFIRMATORY LICENSE;ASSIGNOR:BLACKTOE MEDICAL;REEL/FRAME:023815/0243 Effective date: 20091009 |
|
| STCB | Information on status: application discontinuation |
Free format text: ABANDONED -- FAILURE TO RESPOND TO AN OFFICE ACTION |