US20050085348A1 - Apparatus for the improvement of rowing technique - Google Patents
Apparatus for the improvement of rowing technique Download PDFInfo
- Publication number
- US20050085348A1 US20050085348A1 US10/966,253 US96625304A US2005085348A1 US 20050085348 A1 US20050085348 A1 US 20050085348A1 US 96625304 A US96625304 A US 96625304A US 2005085348 A1 US2005085348 A1 US 2005085348A1
- Authority
- US
- United States
- Prior art keywords
- position reference
- reference device
- rower
- seat
- guide bar
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images















Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/0076—Rowing machines for conditioning the cardio-vascular system
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/02—Exercising apparatus specially adapted for particular parts of the body for the abdomen, the spinal column or the torso muscles related to shoulders (e.g. chest muscles)
- A63B23/0205—Abdomen
- A63B23/0222—Abdomen moving torso and lower limbs
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/02—Exercising apparatus specially adapted for particular parts of the body for the abdomen, the spinal column or the torso muscles related to shoulders (e.g. chest muscles)
- A63B23/0244—Exercising apparatus specially adapted for particular parts of the body for the abdomen, the spinal column or the torso muscles related to shoulders (e.g. chest muscles) with signalling or indicating means, e.g. of incorrect posture, for deep-breathing exercises
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/06—Training appliances or apparatus for special sports for rowing or sculling
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/0076—Rowing machines for conditioning the cardio-vascular system
- A63B2022/0079—Rowing machines for conditioning the cardio-vascular system with a pulling cable
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/10—Positions
- A63B2220/13—Relative positions
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/17—Counting, e.g. counting periodical movements, revolutions or cycles, or including further data processing to determine distances or speed
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/40—Acceleration
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/50—Wireless data transmission, e.g. by radio transmitters or telemetry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/14—Receivers specially adapted for specific applications
- G01S19/19—Sporting applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
Definitions
- Rowing is a sport where one or more people (“rowers”) propel a narrow boat through water using oars.
- the narrow boat also referred to as a “shell” may be a “single” carrying a single rower or may be a boat that typically carries two, four, eight, or another number of rowers. Each rower typically sits on a sliding seat mounted inside the shell.
- each rower uses a single oar dedicated to one side, port or starboard side of the boat.
- each rower mans two oars which are symmetrically paired and extend from each side of the boat. The rower moves the boat by stroking the oars while sliding forward and back in the seat.
- the catch is point of the rowing cycle at which the blade enters the water after the rower has prepared for the stroke by sliding forward on the seat (described later in the definition of recovery).
- the catch is accomplished by an upward motion of the arms and hands.
- the drive is that part of the rowing cycle when the rower applies power to the oar. This is typically a blended sequence of the rower applying power primarily with a leg extension, then with the rower's back and finally the rower's arms.
- the release is a sharp downward and away motion of the hands from the body which serves to remove the oar blade from the water at the end of the drive.
- the rower has slid the seat back to his or her biometrically physical limit and finished applying power.
- the recovery is the series of activities preparing for the catch and drive including sliding the seat forward combined with gradual rolling of the oar blade from a position parallel to the water to a position substantially perpendicular to the surface of the water (called “squaring the oar”). Squaring the oar blade is done in preparation for the catch.
- “Rowing” may also be done on land on a rowing machine.
- a rowing machine is typically used to improve rowing and general fitness off the water or when it is not possible to row on water.
- a rowing machine includes a sliding seat attached to a standing frame and an oar-simulation portion such as short oars or a pulley attached to a resistance device.
- the pulley-type rowing machine is also referred to as an “erg” because it often includes an ergometer to measure the power of the rower's stroke.
- One example of a rowing machine is the Indoor Rower from Concept 2, Inc. of Vermont.
- the rower does not receive feedback on their rowing technique from the machine. Feedback for rowing technique may be provided, for example, by external cues from either a coach or trained individual prompting the rower with proper rowing etiquette.
- the rower's hands may be too high at the finish of the drive which causes the oar blade(s) to go deep in the water making it difficult to pull the oar out of the water at the release. Hands may also be too low at the finish of the drive, shortening the power phase of the stroke, placing the oar partially in the water allowing the rower to tear away at the surface of the water (“washing out”), and causing imbalance on the side of the boat opposite the oar washed out. Using the back before the legs on the drive also decreases the power of the stroke. “Grabbing” is another example of poor rowing technique. In grabbing, the rower initiates the drive sequence with his or her arms rather than legs (or legs and back). A rower may also “shoot the slide” in which the rower initiates the drive with the legs but leans forward failing to bring the oars back in concert with the legs. There are many other examples of poor rowing technique.
- Video tapes are typically shown after a practice session and are generally not as helpful as if the feedback were more immediate, such as if the feedback were provided immediately during the act of taking an oar stroke in a boat on the water. Additionally, though the rower can view his or her own stroke on the videotape, the rower may not have a clear idea of what the oar stroke should be in action on the water. Mirrors provide more immediacy than video tape but the rower cannot get a profile view without turning his or her head thus altering body position and, therefore, also the stroke. Finally, with any of the solutions described above, it is difficult to determine the spatial relationship of the rower's hips (or the seat) to the rower's hands which are important indicators of whether the rowing is using proper technique.
- the present invention is directed to a position reference device that provides immediate and constant feedback to a rower.
- the position reference device indicates the body positions of the rower over the course of each rowing stroke.
- the position reference device thus provides a reference for kinesthetic learning through constant feedback about hip, torso and hand position.
- Embodiments of the feedback device can be used on either a boat or on a rowing machine.
- the embodiments for boats in particular provide the immediate on-the-water feedback that enables a rower to improve technique in a way that conventional feedback devices generally do not.
- the rowing machine embodiments enable rowers a means to improve skill while off the water thus enabling the rower to learn better technique even when it is not possible to row on water.
- a first embodiment of the position reference device include a seat locator attached to the rowing apparatus where the seat locator indicates the hip location of a rower positioned on a seat of the rowing apparatus and a hand locator attached to the rowing apparatus where the hand locator indicates hand position of the rower.
- the seat locator and hand locator are positioned relative to each other according to biometric data of the rower such that the position reference device indicates the rower's body position during at least one selected stroke point.
- the rowing apparatus may be either in a boat on the water or on a rowing machine.
- the seat locator is an adjustable guide bar having a first end and a second end, the adjustable guide bar attached to the seat at the first end and the hand locator is a cross bar attached substantially perpendicular to the second end of the guide bar.
- the guide bar is shaped and configured to prevent axial rotation of the guide bar.
- a first example of such a shape and configuration is a guide bar that is oval in cross-section.
- a second example of such a shape and configuration is a guide bar that is rectangular in cross-section.
- the seat locator further includes an adjustment assembly attached to the seat.
- the adjustment assembly holds the guide bar and enables a tilt adjustment and an extension adjustment so that the position reference device may be fitted to the rower according to the rower's biometric data.
- the guide bar includes additional embodiments such as a further adjustment device to enable a height adjustment so that the cross bar may be raised or lowered according to the rower's biometric data.
- a first embodiment of the adjustment assembly includes an adjustment frame that saddles a rowing machine rail.
- the adjustment frame attaches to the side of the seat carriage for example via the axle bolts.
- the adjustment frame attaches under the seat top, above the seat carriage.
- the guide bar is attached at one side of the adjustment frame.
- the guide bar in one embodiment is attached to the adjustment frame with clamps.
- the adjustment frame further includes a slot and a hole configured to receive the clamps to allow for a tilt adjustment of the guide bar.
- the position reference device has two guide bars, one attached symmetrically on either side of the adjustment frame and the cross bar is attached between the two guide bars.
- the adjustment frame that symmetrically saddles the rowing machine rail provides balance to the position reference device.
- the second guide bar provides further balance and stability to the position reference device.
- the adjustment assembly is a half saddle attached to the seat where the guide bar is attached to the half saddle in similar fashion as in the full saddle. This embodiment is less bulky and lighter than the full saddle embodiment.
- the cross bar is extended in length so that this extension spans across a second rowing machine located next to the rowing machine with the attached position reference device.
- the extended cross bar enables a second rower on the second rowing machine to operate the second rowing machine in synchronization with the rower on the rowing machine with the attached position reference device.
- a first and a second rowing machine are fitted with position reference devices where each position reference device includes an extension. The extensions are configured so that they are in proximity when the rowers row synchronously.
- the rowing machine in another rowing machine embodiment of the position reference device, includes a cable attached at a first end to a resistance wheel and a handle attached at a second end of the cable, the handle to be held by the rower.
- the seat includes rollers and the rowing machine further includes a rail along which the seat rolls.
- the seat locator has a first sensor to detect location of the seat relative to the rowing machine the hand locator has a second sensor to sense the handle position relative to the rowing machine.
- the sensors are coupled to a transmitter to transmit the data to a receiver.
- the transmitters may, for example, be for wired transmission or broadcast transceivers for wireless transmission.
- This embodiment also typically includes a display device coupled to the receiver to collect the data generated by all of the sensors.
- Batteries are included to power the sensors in a first embodiment.
- a power scavenging device such as a solar collector, is included in the configuration to provide further energy.
- the power scavenging device can either augment battery power or replace it all together.
- the sensor embodiment allows the rower's position to be determined electronically and generates data that can be studied later as well as immediate feedback to the rower. Sensors and transmitters are similarly applied to a boat where the hand sensors are mounted such to sense the movement of the oar handle(s).
- the position reference device includes a computation device storing the biometric data of the rower, hand and seat locations for selected stroke points for specific rowers.
- This biometric data such as height, inseam, and arm length for example, coupled with typical data covering the physical variation range of rowers adequately describes the body position of the rower.
- the computation device correlates sensor data with biometric data to determine the body position relative to the rowing device and the oar handle relative to the rowing device, processes this correlated data to classify the deviation and degree from proper rowing technique, such as over-reaching at the catch, grabbing, skying, shooting the slide as described above, and sending this classified and degreed data to the display device to display output of this correlated data in order to provide specific position feedback data to the rower.
- a first embodiment includes a gyroscope and an accelerometer combination.
- a first gyroscope and first accelerometer is located in the seat and a second gyroscope and a second accelerometer is located in the rowing machine handle or in the oar attached to a boat.
- the gyroscope and accelerometer combination could instead be replaced by a global positioning sensor (GPS) in communication with global positioning satellites.
- GPS global positioning sensor
- the handle location may be detected by a chain length sensor, such as chain tooth counter or sprocket rotation counter, combined with chain angle sensor on the rowing machine chain.
- the position of the seat on either a rowing machine or a boat may be detected by a linear position encoder or by a rotation encoder using the rotation of the seat wheels.
- the position reference device includes a seat locator where the seat locator is a guide bar attached at a first end to the seat at the center front of the seat and where the hand locator is a transparent plate (alternatively, a screen) attached at the second end of the guide bar where the transparent plate has markings to indicate hand position.
- the transparent plate is centered with respect to the seat.
- the transparent plate includes indicator marking so that the rower can determine his or her proper hand position.
- the transparent plate has markings for sculling while other embodiments have markings for sweep rowing.
- the guide bar is extendible forward and backward from the seat and the transparent plate may be raised or lowered on the guide bar thus providing adjustability according to the biometric characteristics of the rower.
- a further alternative boat embodiment of the position reference device includes a camera attached to the oarlock and facing the rower, the camera adjusted to encompass the rower in its field of view.
- the camera communicates with a display mounted within the confines of the boat.
- the display in one example embodiment is mounted at the rower's feet. Alternatively, the display is suitably mounted, permitting the rower clear view, to another rower in front of the rower being viewed by the camera.
- the camera further transmits data to a processing device that together with the rower's biometric data produces information about the rower's deviation from proper rowing technique. This information is in some embodiments displayed to the rower while rowing. Alternatively, the data is stored for later examination.
- a second camera also mounted on the oar lock and facing out provides a view of the oar position.
- FIG. 1 is a side view sketch of a conventional rowing machine
- FIG. 2 is a side view sketch of a rowing machine including a position reference device according principles of the invention
- FIG. 3 is a perspective view of the rowing machine of FIG. 2 ;
- FIG. 4 is a perspective view of an alternative embodiment of the position reference device of the present invention.
- FIG. 5 is a side view of the embodiment of the position reference device of FIG. 2 including a rower operating the rowing machine where the rower is positioned at the beginning of the drive portion of the rowing stroke, the “catch”;
- FIG. 6 is a side view of the position reference device of FIG. 2 where the rower is positioned properly at the start of the back swing of the drive portion of the rowing stroke, “body-over”;
- FIG. 7 is a side view of the position reference device of FIG. 2 where the rower is properly positioned at the back swing end of the drive portion of the rowing stroke, “hands- away”;
- FIG. 8 is a side view of the position reference device of FIG. 2 where the rower is positioned properly at the end of the drive portion of the rowing stroke, the “finish”;
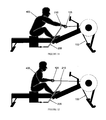
- FIG. 9 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by “over-reaching” at the catch portion of the rowing stroke;
- FIG. 10 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by using the back before the legs during the drive portion of the rowing stroke;
- FIG. 11 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by driving the legs without moving the rowing machine handle during the drive portion of the rowing stroke, “shooting the slide”;
- FIG. 12 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by pulling in with the arms during the drive portion of the rowing stroke while the legs are bent, “grabbing”;
- FIG. 13 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by hands too low at the finish of the drive portion of the rowing stroke, “washing out”;
- FIG. 14 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by hands too high at the finish of the drive portion of the rowing stroke, “digging at the finish”;
- FIG. 15 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by hands too low at the catch, “skying”;
- FIG. 16 is a perspective sketch of an alternative embodiment of the position reference device according to principles of the invention where the position reference device is attached to a rowing machine;
- FIG. 17 is a perspective sketch of another alternative embodiment of the position reference device of FIG. 16 where the position reference device is attached to a rowing machine;
- FIG. 18 is a perspective sketch of a further alternative embodiment of the position reference device of FIG. 17 where the position reference device is attached to a seat in a boat;
- FIG. 19A is a top view of a first alternative embodiment of the cross bar of FIG. 18 for sculling
- FIG. 19B is a top view of a second alternative embodiment of the cross bar of FIG. 18 for a starboard sweep oar;
- FIG. 19C is a top view of a third alternative embodiment of the cross bar of FIG. 18 for a port sweep oar;
- FIG. 20 is a perspective sketch of an alternative embodiment of the position reference device according to principles of the invention where the rower's position is indicated through electronics;
- FIG. 21 is a diagram of the hand position sensors of the position reference device of FIG. 20 where the sensors are located inside the oar handle;
- FIG. 22 is a diagram of the hand position sensors of the position reference device of FIG. 20 where the sensors are arranged in a configuration that is attached to the outside of the oar handle;
- FIG. 23 is a block diagram of the sensor configuration of the electronic position locator of FIG. 21 ;
- FIG. 24 is a block diagram of the sensor configuration in a multiple rower boat
- FIG. 25 is a sketch of an embodiment of the position reference device of the invention where a camera is used to determine the rower's body position;
- FIG. 26 is a sketch of an embodiment of the position reference device of the invention to be mounted in a boat where two cameras are used to follow the rower's movements;
- FIG. 27 is a block diagram of a computer used to process data received from the cameras of FIGS. 25 and 26 ;
- FIG. 28 is a rowing machine chain position detection device according to principles of the present invention.
- the position reference device of the present invention includes a hand locator and a seat locator positioned relative to each other according to the rower's biometric data to indicate torso and hand positions of the rower over the course of the rowing stroke.
- the immediate feedback to the rower enables the rower to improve rowing technique while rowing.
- Embodiments for the rowing machine enable the rower to learn proper rowing technique when “rowing” off the water.
- FIG. 1 is a side view sketch of a conventional rowing machine 100 .
- the rowing machine 100 is the Indoor Rower from Concept 2, Inc. of Vermont. This rowing machine is merely one example of a rowing machine that may be used in conjunction with the present invention. Other rowing machines are contemplated within the scope of the present invention.
- the rowing machine 100 has a sliding seat 105 mounted on a rail 110 .
- the sliding seat 105 uses rollers 115 to slide along the rail 110 .
- the rowing machine 100 includes a resistance device 120 .
- a handle 125 attached to a cable 130 (or chain) is connected to the resistance device 120 .
- a rower on the rowing machine 100 sits on the sliding seat 105 with his or her feet in the foot stretchers 140 and holds the handle 125 .
- the rower “rows” on the rowing machine 100 while sliding on the sliding seat 105 and pulling on the handle 125 .
- FIG. 2 is a side view sketch of the rowing machine 100 including a position reference device according principles of the invention.
- the position reference device includes a seat locator attached to the rowing machine 100 where the seat locator indicates the leg extension of a rower operating the rowing machine.
- the position reference device also includes a hand locator attached to the rowing machine 100 where the hand locator indicates hand position of the rower operating the rowing machine 100 .
- the seat locator is a guide bar 205 attached at the seat 105 and extending forward toward the front of the rowing machine 100 .
- the hand locator is a cross bar 210 attached substantially perpendicularly to the guide bar 205 at the forward end of the guide bar 205 .
- the guide bar 205 and the cross bar 210 are illustrated in perspective view in FIG. 3 .
- the guide bar 205 in FIG. 2 is attached at the seat 225 through a mounting frame 215 saddling the rail 110 .
- the seat 225 rolls along the rail 110 on a carriage 220 having rollers (not shown) similar to the rollers 115 shown in FIG. 1 .
- the mounting frame 215 is mounted on the carriage 220 .
- the mounting frame 215 also holds a seat top 105 . Accordingly the mounting frame 215 and seat top 105 together form the rower's seat 225 .
- the mounting frame 215 is mounted under the seat top 105 above the seat carriage using existing seat carriage mounting features. Alternatively, as shown in FIG.
- the combination mounting frame 215 and adjustment bracket 520 is mounted to the side of the seat carriage, below seat top 105 , via the fixed axle bolts attaching the rollers 115 to the seat carriage. Any attachment that provides a fixed reference with regard to the seat top 105 is contemplated within the scope of the invention.
- the guide bar 205 is adjustable so that the guide bar 205 and the cross bar 210 are positioned relative to the seat 225 according to the rower's biometric data such that the position reference device indicates the rower's body position during at least one selected stroke point.
- Biometric data includes such measurements as the arm length, inseam and height of the rower. Examples of positioning for at least one selected stroke point are provided below in FIGS. 5-15 .
- the guide bar 205 is adjustable in length in the present embodiment at a clamp 230 on the adjustment bracket 245 , which attached to the mounting frame 215 by adjustment screws 235 , that enables the guide bar 205 to be adjusted forward or backward according to the rower's biometric data.
- Other ways of adjusting the guide bar 205 are possible.
- One example of an alternative length adjustment scheme is a telescoping joint.
- the invention is not limited to the clamp 230 shown here.
- the present embodiment provides height adjustment of the cross bar 210 with respect to the seat 225 by a tilt adjustment of the guide bar 205 , which connects to the cross bar 210 at one end, according to the rower's biometric data. This tilt adjustment is accommodated by the tilt slot 240 in the adjustment bracket 245 .
- the guide bar 205 which is attached to the adjustment bracket 245 with clamp 230 , is tilted by rotation of the adjustment bracket 245 about hole 250 with screw 235 through hole 250 acting as rotational pin guided by the arced slot 240 and the corresponding screw 235 acting as a slot guide pin.
- An alteration in the tilt of the guide bar 205 raises or lowers the cross bar 210 as needed to indicate hand position of the rower according to the rower's biometric data.
- the screws 235 are tightened to maintain the height adjustment.
- the height adjustment scheme shown in the present embodiment is merely exemplary. Other height adjustment schemes are possible within the scope of the invention.
- an additional adjustment joint could be added to the guide bar itself to provide variation in height of the cross bar 210 .
- the guide bar 205 may also include a breakaway joint for safety purposes.
- the guide bar 205 may be made of a flexible material maintain appropriate stiffness to shape and affix clamps.
- the guide bar 205 is shaped and configured to prevent rotation of the guide bar 205 with respect to the adjustment bracket 245 .
- the guide bar 205 could be oval-shaped in cross-section.
- the guide bar 205 could be rectangular in cross-section.
- a further alternative embodiment to prevent the rotation of the guide bar with respect to the adjustment bracket 245 is a pin inserted through the guide bar 205 and adjustment bracket 245 .
- the mounting frame 215 shown in FIG. 2 extends over the rail 100 at both sides
- the mounting frame 215 could, in an alternative embodiment be a half-frame holding the seat top 105 and extending over only one side of the rail 100 .
- This embodiment is not as balanced as the mounting frame 215 shown in FIGS. 2 and 3 and this configuration may unevenly wear the seat rollers 115 and the rail 100 .
- the length of the cross bar 210 is extended so that the cross bar 210 extends over a second rowing machine positioned next to and aligned parallel to the first rowing machine 100 .
- This embodiment enables a second rower operating the second rowing machine to row in synchronization with the first rower operating the first rowing machine.
- This embodiment further includes a breakaway joint in the cross bar 210 for safety purposes.
- the extension extends to within close proximity of a similar extension from the second rowing machine having its own position reference device so that each rower can see whether or not rowing is being performed in synchronicity.
- FIG. 4 is a perspective view of an alternative embodiment of the position reference device of the present invention. That is, FIG. 4 shows a perspective view of the rowing machine 100 including an alternative embodiment of the position reference device of the present invention.
- the embodiment shown in FIG. 4 includes the guide bar 205 and cross bar 210 of the embodiment shown in FIG. 2 .
- the guide bar 105 is attached to the adjustment bracket 245 , which is attached to mounting frame 215 , as described with regard to FIG. 2 .
- the present embodiment of the invention further includes a second guide bar 300 attached at a first end to the second adjustment bracket 405 , which is attached to the mounting frame 215 in similar fashion to the first adjustment bracket 245 .
- the second guide bar 300 is attached at its second end to the cross bar 210 .
- the second guide bar 300 provides a further balancing factor to the position reference device.
- FIG. 5 is a side view of the embodiment of the position reference device of FIG. 2 including a rower 400 operating the rowing machine 100 where the rower 400 is positioned at the beginning of the drive portion of the rowing stroke at the “catch.”
- the rower 400 sitting on the seat 225 is compressed forward with the arms extended straight away.
- the guide bar 205 and cross bar 210 have been positioned so that the rower's hands are located under the cross bar 210 at this point of the stroke.
- FIG. 6 is a side view of the position reference device of FIG. 2 where the rower 400 is positioned properly at the start of the back swing of the drive portion of the rowing stroke in the “body over” position.
- the guide bar 205 and cross bar 210 are positioned as in FIG. 4 .
- the rower 400 has begun the drive portion of the stroke by extending his legs but has not yet pulled back from the forward-leaning position.
- the rower 400 has maintained proper position by keeping his hands under the cross bar 210 .
- FIG. 7 is a side view of the position reference device of FIG. 2 where the rower 400 is properly positioned at the back swing end of the drive portion of the rowing stroke at the “hands-away” position.
- the guide bar 205 and cross bar 210 are positioned as in FIG. 4 .
- the rower 400 has reached full leg extension in the drive and has completed his back pull. This caused the rower's hands (pulling on the handle 125 of the rowing machine 100 ) to come back from the cross bar 210 .
- the cross bar 210 continues to indicate whether the rower's hands are in proper position because the chain 130 (alternatively, a cable) of the rowing machine 100 remains at even height under the cross bar 210 .
- FIG. 8 is a side view of the position reference device of FIG. 2 where the rower is positioned properly at the end of the drive portion of the rowing stroke at the “finish.”
- the guide bar 205 and cross bar 210 are positioned as in FIG. 5 .
- the rower 400 has completed the leg extension and back swing of the drive and has additionally pulled his arms and hands (grasping the rowing machine handle 125 ) in towards his body.
- the cross bar 210 continues to indicate whether the rower's hands are in proper position because the chain 130 of the rowing machine 100 remains at even height under the cross bar 210 .
- FIG. 9 is a side view of the position reference device of FIG. 2 where the rower 400 is improperly positioned by over-reaching at the catch portion of the rowing stroke.
- the guide bar 205 and cross bar 210 are positioned as in FIG. 5 .
- the rower 400 is overly compressed with the shoulders dropped at the beginning of the drive portion of the stroke and this is indicated by the rower's hands (holding the rowing machine handle 125 ) are beyond the cross bar 210 .
- FIG. 10 is a side view of the position reference device of FIG. 2 where the rower 400 is improperly positioned by using the back before the legs during the drive portion of the rowing stroke.
- the guide bar 205 and cross bar 210 are positioned as in FIG. 5 .
- the rower 400 has started the back swing before the leg extension which is indicated by the rower's hands (holding the rowing machine handle 125 ) coming back from the cross bar 210 before the legs are extended.
- FIG. 11 is a side view of the position reference device of FIG. 2 where the rower 400 is improperly positioned by driving the legs without moving the rowing machine handle 125 during the drive portion of the rowing stroke “shooting the slide.”
- the guide bar 205 and cross bar 210 are positioned as in FIG. 5 .
- the improper position of the rower 400 is indicated by the cross bar 205 coming forward over the rower's arms during the leg extension portion of the stroke.
- FIG. 12 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by grabbing with the arms during the drive portion of the rowing stroke, “grabbing” at the catch.
- the guide bar 205 and cross bar 210 are positioned as in FIG. 5 .
- the rower 400 has initiated the drive portion of the stroke with the arms.
- the improper position of the rower 400 is indicated by the rower's hands (holding the rowing machine handle 125 ) pulled away from the cross bar 210 .
- FIG. 13 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by hands too low at the finish of the drive portion of the rowing stroke, “washing out.”
- the guide bar 205 and cross bar 210 are positioned as in FIG. 5 .
- the rower 400 has completed the leg extension and back swing of the drive but the rower's hands are pulled too low toward the rower's body. This is indicated by the relative position of the chain 130 of the rowing machine 100 with respect to the cross bar 210 .
- the chain 130 when the rower 400 maintains proper hand height during the drive should remain at a constant height with respect to the cross bar 210 .
- FIG. 14 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by hands too high at the finish of the drive portion of the rowing stroke “digging” at the finish.
- the guide bar 205 and cross bar 210 are positioned as in FIG. 5 .
- the rower 400 has completed the leg extension and back swing of the drive but the rower's hands are pulled too high on the rower's body. This is indicated by the relative position of the chain 130 of the rowing machine 100 with respect to the cross bar 210 .
- the chain 130 when the rower 400 maintains proper hand height during the drive should remain at a constant height with respect to the cross bar 210 .
- FIG. 15 is a side view of the position reference device of FIG. 2 where the rower is improperly positioned by hands too low at the catch, “skying.”
- the guide bar 205 and cross bar 210 are positioned as in FIG. 5 .
- the rower 400 is compressed forward with arms straight forward.
- the rower's hand (holding the handle 125 of the rowing machine 100 ) are positioned under the cross bar 210 but are positioned too low under the cross bar.
- the indicators provided by the position reference device are merely examples.
- the position reference device can be used to indicate other proper or improper rowing technique.
- the cross bar 210 could be positioned below the rower's hands and effectively indicate proper or improper rowing technique.
- additional indicators extending from the guide bar 205 indicate other joint and body centers such as head and shoulders.
- FIG. 16 is a perspective sketch of an alternative embodiment of the position reference device according to principles of the invention where the position reference device is attached to the rowing machine 100 .
- the guide bar 205 is extended and turned back on itself at the seat end of the guide bar 205 .
- the seat end of the guide bar 205 is then attached to the combination mounting frame and adjustment bracket 520 .
- the combination mounting frame and adjustment bracket 520 is mounted to the side of the seat carriage, below seat top 105 , via the fixed axle bolts attaching the rollers 115 to the seat carriage 220 .
- the guide bar 205 is attached to the combination mounting bracket and adjustment bracket by clamps 505 .
- the cross bar 210 is attached substantially perpendicular to the guide bar 205 as in FIG. 2 .
- the guide bar 205 and the cross bar 210 in this embodiment may be extended forward and back by sliding the guide bar 205 forward and back in the clamps 505 . Height adjustment is accomplished similarly to FIG. 2 , discussed above, by a third clamping screw 505 guiding an arced slot in the combination mounting frame and adjustment bracket 520 .
- FIG. 17 is a perspective sketch of another alternative embodiment of the position reference device of FIG. 16 where the position reference device is attached to the rowing machine 100 .
- the position reference device includes the guide bar 205 and the cross bar 210 .
- a first end of the guide bar 205 is attached to the seat 225 at the middle front with a first clamp 510 .
- the guide bar 205 is typically made of a lightweight material but material having sufficient stiffness to hold clamps.
- the cross bar 210 is attached substantially perpendicular to the guide bar 205 at a second end of the guide bar 205 .
- the cross bar 210 in this embodiment is attached to the guide bar 205 with a second clamp 515 .
- the first clamp 510 enables the guide bar 205 to be extended forward or backward.
- the second clamp 515 enables the cross bar 210 to be raised or lowered on the guide bar 205 .
- the guide bar 205 and cross bar 210 can be adjusted in both length and height according to the rower's biometric data.
- the guide bar 205 and cross bar 210 are adjusted such that the rower's hands move over the cross bar 210 and the guide bar 205 rather than under the guide bar.
- the cross bar 210 clamp 515 mounting feature is extended well below the cross bar 210 to allow for telescoping adjustment of the cross bar 210 height along a shortened guide bar 205 when the cross bar 210 is positioned below the hands to prevent interference with the rowing machine handle 125 .
- the cross bar is shaped, for example, in a “question mark”-shape to prevent interference with the rower's hands on the rowing machine handle 125 while maintaining the over-the-hands cross bar reference and the cross bar is adjustably attached to a shortened guide bar 205 by clamp 515 below the lowest possible rowing machine chain 120 height.
- FIG. 18 is a perspective sketch of a further alternative embodiment of the position reference device of FIG. 17 where the position reference device is attached to a seat 605 in a boat 600 . Only the section of the boat 600 where the seat 605 is attached is shown in this illustration.
- the position reference device includes the guide bar 205 and alternative embodiment of a cross bar 615 .
- the guide bar 205 is attached at a first end to the seat in similar fashion to the embodiment shown in FIG. 17 .
- the alternative cross bar 615 is attached substantially perpendicular to the guide bar 205 .
- the guide bar 205 and alternative cross bar 615 are adjustable according to the rower's biometric data.
- the guide bar 205 can be moved forward and backward at the seat and the alternative cross bar 615 can be adjusted up or down on the guide bar 205 .
- the alternative cross bar 615 is a transparent plate 620 with markings as shown in FIGS. 19A, 19B and 19 C.
- the rower is able to view his or her hands through the transparent plate 620 and the markings enable the rower to determine whether he or she is rowing with proper technique.
- the transparent plate 620 is a translucent plate with markings or a screen with markings.
- the screen in particular, has the advantages that it is non-glare and can be light in weight.
- FIG. 19A is a top view of a first embodiment of the transparent plate 620 of FIG. 18 .
- the transparent plate 620 has markings 650 and 655 configured and arranged to provide indications for sculling (that is, where the rower is using two oars).
- the markings 655 positioned towards the stern of the boat, indicate proper position for each hand on its oar at a selected point of the oar stroke, such as the catch.
- the marking 650 is positioned toward the bow of the boat indicates the second selected point of the oar sequence, such as the hands-away body forward position.
- FIG. 19B is a top view of the cross bar of the transparent plate 620 of FIG. 18 for a starboard sweep oar.
- the transparent plate 620 has markings 650 and 660 .
- the markings 660 positioned towards the stern of the boat, indicate proper position for the starboard sweep oar at a selected point of the oar stroke, such as the catch.
- the marking 650 is positioned toward the bow of the boat indicates the second selected point of the sweep oar sequence, such as the hands- away body forward.
- FIG. 19C is a top view of the cross bar of the transparent plate 620 of FIG. 18 for a port sweep oar.
- the transparent plate 620 has markings 650 and 665 .
- the markings 665 positioned towards the stem of the boat, indicate proper position for the port sweep oar at a selected point of the oar stroke, such as the catch.
- the marking 650 is positioned toward the bow of the boat indicates the second selected point of the sweep oar sequence, such as the hands- away body forward position.
- FIG. 20 is a perspective sketch of an alternative embodiment of the position reference device according to principles of the invention where the rower's position is indicated through electronics.
- the seat position is determined by monitoring the rotation of the wheel 702 with sensor 700 attached to the seat 725 .
- the seat position is determined with optical sensor 705 attached to the seat 725 viewing position indicator strip 707 .
- the described electronic measurement means of the seat position are exemplary and other means for measurement are possible.
- a rigger 720 attached to the boat 600 holds an oar 730 .
- a third sensor and a fourth sensor (shown in FIG. 20 ) are mounted inside the oar handle 710 .
- Foot stretchers 715 are attached to the boat 600 forward of the rigger 720 .
- the third sensor, a gyroscope, and the fourth sensor, an accelerometer determine the position of the hands by determining the position of the oar handle in space.
- the fifth sensor, an electronic oar lock angle measurement, and the sixth sensor, an electronic oar pitch measurement with respect to the rigger 720 determine the position of the hands by determining the position of the oar with respect to the rigger 720 .
- the sensors in the seat 725 and in the either the oar handle 710 or by the oar lock 735 locate the seat and the rower's hands with respect to the foot stretchers 715 .
- the sensors provide continuous location data of the rower's position over the course of each oar stroke.
- the sensors are typically associated with wireless transmitters that transmit the position data to a receiver.
- the received data is used to determine the position of the rower's body, which compared against correct positions for the rower. Generally, deviations from proper rowing technique are displayed on a display device to provide feedback to the rower. Full rower data is stored for later detailed analysis of the rower's body position through many complete rowing strokes.
- gyroscope and accelerometer combination is replaced by a global position reference device sensor sensing the location of the oar handle.
- FIG. 21 is a diagram of the hand position sensors of the position reference device of FIG. 20 where the sensors are located inside the oar handle.
- a gyroscope 750 , an accelerometer 755 , a battery 760 , a wireless transmitter 765 and a microprocessor 770 are embedded in the oar handle 710 .
- the gyroscope 750 and accelerometer 755 sense the location of the oar handle 710 and therefore the rower's hand(s) with respect to the foot stretchers 715 (shown in FIG. 20 ).
- the data from the sensors 750 and 755 is processed by the microprocessor 770 to determine the oar position in space.
- This processed data is transmitted by the wireless transmitter 765 to a receiving device within the display unit (not shown) or to another receiver.
- the gyroscope 750 , accelerometer 755 , wireless transmitter 765 and microprocessor 770 are powered by the battery 760 .
- the battery 760 could be a typical chemical battery, solar cell, a novel power scavenging device or any combination of power sources.
- the gyroscope 750 , accelerometer 755 , battery 760 and wireless transmitter 765 may also be used in the handle of the rowing machine.
- the wireless transmitter 765 can be a wired transmitter.
- FIG. 22 is a diagram of the hand position sensors of the position reference device of FIG. 21 where the sensors are located in a configuration that is attached to the outside of the oar handle.
- the gyroscope 750 , the accelerometer 755 , the battery 760 , the wireless transmitter 765 and the microprocessor 770 of FIG. 20 are embedded in a torus-shaped form 775 that can be slipped onto the oar handle 710 and fastened there.
- FIG. 23 is a block diagram of the hand locator and seat locator sensor configuration.
- the electronic seat locator 900 includes a seat position sensor 905 and a first data communication device 910 .
- An electronic hand locator 915 includes an oar position sensor 920 and a second communication device 925 .
- the first communication device 910 and the second communication device 925 communicate with a central data device 930 .
- the central data device 930 includes a third data communications device 935 , a biometric storage device 940 , a position calculation device 945 , a data storage device 950 , a display data device formatting device 955 and an information display device 960 .
- the third data communications device 935 receives data from the first and second communications devices 910 , 925 .
- the position calculation device 945 calculates position data using the received data and rower biometric data stored in the biometric data device 940 .
- the central data device 930 stores the position data in the data storage device 950 .
- the display data formatting device 955 formats the position data for display on the information display device 960 .
- the data is stored in data storage device 950 so that the data may be later downloaded and reviewed.
- FIG. 24 is a block diagram of the sensor configuration of FIG. 23 including a plurality of seat and hand locator devices.
- FIG. 25 is a sketch of an embodiment of the positioning device of the invention where a camera is used to determine the rower's body position.
- hand and seat location are determined by taking an image of the rower in motion and measuring the positions of the hands and seat relative to a fixed reference on the rowing machine 100 or boat 600 , such as the foot stretchers 140 and 715 respectively.
- a camera 580 as shown in FIG. 25 is placed a distance away from the rowing machine or on a fixed reference from a rower seated in a boat such that the camera field of view 585 encompasses the entire length of the seated rower's stroke.
- the camera takes a number of sequential images of the rower as the rowing stroke is executed.
- the camera transfers the image to a sufficiently high-speed computer 590 , such as a desktop, laptop, or handheld computer to process the image.
- a sufficiently high-speed computer 590 such as a desktop, laptop, or handheld computer to process the image.
- Appropriate signal processing will detect the rower's body position, such as the hands, arms, legs, and torso, in relation to features of the rowing device, such as the seat and foot stretcher. The signal processing will determine the hands and seat locations relative to the fixed reference on the rowing device for each image.
- Biometric data stored for the seated rower determines the proper hand and body positions as discussed above with regard to FIGS. 5-17 .
- the desired rowing positions may be calibrated at positions throughout the rowing stroke for the seated rower.
- the measured position of the hands and seat relative to the fixed reference on the rowing device, such the foot stretcher, compared to the rower's biometric data determines whether there is deviation from proper rowing technique, These parameters also determine the degree of deviation.
- Various configurations of displayed results are possible.
- the displayed results may include actual rowing strokes with a stick figure indicating the proper rower position, pictorial highlights indicating the deviation from ideal position and accentuated highlights to indicate the degree of deviation, or signals to indicate the deviations and degree thereof.
- the display may instead be of the acquired image data directly without technical critique.
- the display is any form of information display device formatted appropriately to display continuously updated results, for example, a desk top, laptop or handheld computer display. The display is oriented so that the rower could receive feedback while rowing and data saved for review after the workout is complete.
- FIG. 26 is a further embodiment of the camera system of FIG. 25 for on the water usage.
- the hand and body positions of a rower seated on seat 725 in boat 600 are obtained by acquiring a number of sequential images of the rower with a camera 560 mounted on oar lock 745 throughout the rowing stroke.
- the camera 560 is mounted on a moving reference, the oar lock 745 , synchronized to the sweep angle of the rowing oar 730 .
- the camera 560 is positioned in such a way to capture the rower's body position centered within the field of view of the camera 560 while the rower is holding the oar handle 710 .
- the camera 560 mounting fixture on the moving reference 745 is attached without interference to any of the rowing mechanisms, such as rigger 720 , oar 730 , and oar lock 745 , throughout the rowing stroke. As the oar moves, the camera 560 will capture images of the hands, body and boat positions as referenced to the oar 730 .
- a second camera 570 may additionally be attached to the moving reference, oar lock 745 , without creating interference with the rowing mechanisms. The second camera 570 is mounted in such a way to capture the end of the oar, blade, and water centered within the field of view of the camera 570 . This second camera 570 views the action of the oar 730 throughout the rowing stroke.
- FIG. 26 is exemplary of port sweep oar and rowing in the starboard configuration follows as above with the rowing mechanisms and camera(s) on the opposite side and rowing in the sculling configuration follows as above with the rowing mechanisms and camera(s) on both sides.
- FIG. 27 is a block diagram of the computer 590 used to process data received from the cameras of FIGS. 25 and 26 .
- the computer 590 includes a processor 1100 , a storage device 1115 storing rower biometric data 1135 , and a memory 1120 .
- the processor 1100 includes a hand position subprocessor 1105 and a seat position subprocessor 1110 .
- the computer 590 further includes an input/output interface 1125 through which the computer 590 communicates to the cameras 560 , 570 and a display 1130 .
- the processor 1100 receives data from at least the camera 560 capturing images of the rower.
- the hand position subprocessor 1105 calculates the hand position relative to the rowing device from the captured image.
- the seat position subprocessor 1110 calculates the seat position relative to the rowing device from the captured image.
- the hand and seat positions reported by subprocessors 1105 and 1110 respectively are correlated to the biometric data by the processor 1100 to produce data about the rower's deviation from proper rower technique. This deviation data can be stored in the storage device 1115 for later examination.
- the images from the camera and any data stored on or produced by the computer 590 may be displayed on the display 1130 .
- Other locations of the rower's body in space are also possible within the scope of the invention.
- the present invention is not limited to hand and seat locations but could determine any point such as the rower's head or shoulders.
- FIG. 28 is a rowing machine chain position detection device according to principles of the present invention.
- the position of the hands holding the rowing machine handle 125 as in FIG. 2 are sensed electronically by measuring the length of the rowing machine chain 130 and the angle the rowing machine chain 130 makes with respected to axle of the rowing machine 100 resistance wheel throughout the entire rowing sequence.
- a fixed measurement plane for example the chain aperture 260 as shown in FIGS. 3, 4 and 28 , between the rowing machine handle 125 and the axle of the rowing machine 100 resistance wheel is selected.
- the length of the rowing machine chain 130 is measured by counting the number of links passing through the fixed measurement plane 260 and multiplying by the link length, which is a known characteristic length.
- the angle of the rowing machine chain 130 is determined geometrically by measuring the vertical displacement of the rowing machine chain 130 within the fixed measurement plane 260 correlated to the distance from the fixed measurement plane 260 to the center of rotation of the rowing machine 100 resistance wheel.
- an illumination device 800 shown in FIG. 28 which is driven by a source driver 805 , illuminates the fixed measurement plane 260 shining light through the link openings in rowing chain 130 .
- the single illumination device 800 is exemplary and multiple illumination devices are possible.
- the light passing through the rowing chain 130 illuminates the first light sensor 810 and the second light sensor 815 , which is directly behind the first light sensor 810 .
- the first light sensor 810 senses intensity changes as the links in rowing machine chain 130 pass through the fixed measurement plane 260 .
- the second light sensor 815 also senses intensity changes as the rowing machine chain 130 but by being displaced behind the first sensor 810 , the second sensor 815 detects the direction the rowing machine chain 130 is traveling.
- the electronic signals from light sensors 810 and 815 are passed are appropriately detected and filtered so that the transitions between the open and closed sections of the rowing machine chain are counted.
- the two count signals derived from the first and second light sensors, 810 and 815 are passed to the microprocessor for signal processing.
- the relative phase between the count signals determines the direction of the change movement.
- the microprocessor calculates the direction and length of rowing machine chain 130 displaced during the rowing cycle.
- illumination devices 820 shown in FIG. 28 which are driven by source driver 825 , illuminates the fixed measurement plan 260 horizontally.
- the number of illumination devices 820 as illustrated in FIG. 27 are exemplary and any number of illumination devices are possible.
- the light from illumination devices 820 impinges the rowing machine chain 130 , which blocks a portion of the intensity profile from the illumination devices 820 .
- the light sensors 830 shown in FIG. 27 receive the intensity profile from the illumination devices 820 partially blocked by the rowing machine chain 130 . Over multiple light sensors 830 , the detected intensity profile is sampled indicating the position of the intensity dip due to the occlusion of the illumination profile by the rowing machine chain 130 .
- the relative intensities received by each sensor determine the position of the rowing machine chain 130 within the fixed measurement plane.
- the electronic signals from light sensors 830 are passed, appropriately detected and filtered so that the analog signals can be quantized and processed by the microprocessor.
- the microprocessor determines the vertical displacement of the intensity dip in the illumination profile and then calculates the angle of the rowing machine chain 130 by geometric relationship to the center of rotation of the rowing machine 100 resistance wheel.
- the hand locator sensors and seat locator sensors described above may be similarly applied to the rowing machine 100 .
- one alternative embodiment for a rowing machine includes a display device mounted to the cross bar so that the rower may view the data while rowing on the rowing machine without turning his or her head to the side.
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Pulmonology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Neurology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Rehabilitation Tools (AREA)
- Aerodynamic Tests, Hydrodynamic Tests, Wind Tunnels, And Water Tanks (AREA)
Abstract
A position reference device for rowing indicates the relative hip and hand positions of the rower over the course of each rowing stroke. The position reference device provides a reference for kinesthetic learning through constant feedback about torso and hand position. Embodiments of the feedback device can be used on either a boat or on a rowing machine. The embodiments for boats in particular provide the immediate on-water feedback that enables a rower to improve technique in a way that conventional feedback devices generally do not. The rowing machine embodiments enable rowers to improve skill while off the water thus enabling the rower to learn better technique even when it is not possible to row on water.
Description
- This application claims priority of U.S. provisional application Ser. No. 60/511,876 filed Oct. 15, 2003 and titled “The Rower's Shadow”.
- Rowing is a sport where one or more people (“rowers”) propel a narrow boat through water using oars. The narrow boat, also referred to as a “shell” may be a “single” carrying a single rower or may be a boat that typically carries two, four, eight, or another number of rowers. Each rower typically sits on a sliding seat mounted inside the shell.
- Two basic oar configurations are employed in rowing. In one asymmetric configuration referred to as “sweeping”, each rower uses a single oar dedicated to one side, port or starboard side of the boat. In another configuration, referred to as “sculling”, each rower mans two oars which are symmetrically paired and extend from each side of the boat. The rower moves the boat by stroking the oars while sliding forward and back in the seat.
- There are four main parts to the stroke: the catch, the drive, the release and the recovery. The catch is point of the rowing cycle at which the blade enters the water after the rower has prepared for the stroke by sliding forward on the seat (described later in the definition of recovery). The catch is accomplished by an upward motion of the arms and hands. The drive is that part of the rowing cycle when the rower applies power to the oar. This is typically a blended sequence of the rower applying power primarily with a leg extension, then with the rower's back and finally the rower's arms. The release is a sharp downward and away motion of the hands from the body which serves to remove the oar blade from the water at the end of the drive. At this point, the rower has slid the seat back to his or her biometrically physical limit and finished applying power. The recovery is the series of activities preparing for the catch and drive including sliding the seat forward combined with gradual rolling of the oar blade from a position parallel to the water to a position substantially perpendicular to the surface of the water (called “squaring the oar”). Squaring the oar blade is done in preparation for the catch.
- “Rowing” may also be done on land on a rowing machine. A rowing machine is typically used to improve rowing and general fitness off the water or when it is not possible to row on water. In general, a rowing machine includes a sliding seat attached to a standing frame and an oar-simulation portion such as short oars or a pulley attached to a resistance device. The pulley-type rowing machine is also referred to as an “erg” because it often includes an ergometer to measure the power of the rower's stroke. One example of a rowing machine is the Indoor Rower from Concept 2, Inc. of Vermont. Generally, the rower does not receive feedback on their rowing technique from the machine. Feedback for rowing technique may be provided, for example, by external cues from either a coach or trained individual prompting the rower with proper rowing etiquette.
- In order to row efficiently on water (and in some cases, to avoid injury), precise and subtle technique is required of the rower. The positions of the rower's body including the torso and the hands at each point during the stroke are important to effectively move the boat. Even minor deviations from proper body or hand position can negatively impact the rower's ability to move the boat. For example, it is important for the rower's arms and upper body to be properly positioned for the drive early in the recovery portion of the stroke in order to make a smoother transition into the drive and to avoid the arms hitting the legs or any excess motion of the arms and body before the drive begins. A rower should avoid over reaching which is a further compression of the upper body at the end of the recovery in order to add length to the oar stroke. Over reaching places the rower's back in a weak position which may lead to injury. Over reaching also tends to weaken the drive because the drive sequence from the overly compressed position is generally initiated by the rower's back rather then the rower's leg. Another example of poor rowing technique is called “skying” where the rower's hands are too low just before the start of the drive. As a result, the rower must excessively lift the oar handles in order to make a proper catch. In the case of “skying,” the rower will typically start the leg extension without the oar firmly anchored in the water while raising the hands to make the catch causing the rower to miss water at the catch. Similarly, the rower's hands may be too high at the finish of the drive which causes the oar blade(s) to go deep in the water making it difficult to pull the oar out of the water at the release. Hands may also be too low at the finish of the drive, shortening the power phase of the stroke, placing the oar partially in the water allowing the rower to tear away at the surface of the water (“washing out”), and causing imbalance on the side of the boat opposite the oar washed out. Using the back before the legs on the drive also decreases the power of the stroke. “Grabbing” is another example of poor rowing technique. In grabbing, the rower initiates the drive sequence with his or her arms rather than legs (or legs and back). A rower may also “shoot the slide” in which the rower initiates the drive with the legs but leans forward failing to bring the oars back in concert with the legs. There are many other examples of poor rowing technique.
- Because rowing technique is so precise and subtle, it is difficult for the rower himself or herself to know what deviations from proper rowing technique are causing problems in the boat. The reaction of the oars and the boat in the water provides some feedback to the rower, but that feedback is not complete. When rowing on a typical rowing machine, the ergometer provides feedback in the form of power exerted, however, all of the feedback provided by the action of the oars, the boat on water, and traditional coaching and/or coxswain observation are absent. Typical ways of receiving more feedback in order to improve rowing technique include the use of coaching, videotaping and mirrors. Coaching a rower on each stroke is not practical or generally desirable for a rower. Video tapes are typically shown after a practice session and are generally not as helpful as if the feedback were more immediate, such as if the feedback were provided immediately during the act of taking an oar stroke in a boat on the water. Additionally, though the rower can view his or her own stroke on the videotape, the rower may not have a clear idea of what the oar stroke should be in action on the water. Mirrors provide more immediacy than video tape but the rower cannot get a profile view without turning his or her head thus altering body position and, therefore, also the stroke. Finally, with any of the solutions described above, it is difficult to determine the spatial relationship of the rower's hips (or the seat) to the rower's hands which are important indicators of whether the rowing is using proper technique.
- Information relevant to attempts to address the problem of training rowers in proper rowing technique can be found in U.S. Pat. No. 4,984,986. This reference, however, suffers from the disadvantage that the outputs of the device indicate the results of poor rowing technique rather than the actual deviations from proper rowing technique.
- For the foregoing reasons, it remains desirable to have a device that provides immediate feedback to rowers in order to learn and to improve body mechanics for rowing.
- The present invention is directed to a position reference device that provides immediate and constant feedback to a rower. The position reference device indicates the body positions of the rower over the course of each rowing stroke. The position reference device thus provides a reference for kinesthetic learning through constant feedback about hip, torso and hand position. Embodiments of the feedback device can be used on either a boat or on a rowing machine. The embodiments for boats in particular provide the immediate on-the-water feedback that enables a rower to improve technique in a way that conventional feedback devices generally do not. The rowing machine embodiments enable rowers a means to improve skill while off the water thus enabling the rower to learn better technique even when it is not possible to row on water.
- A first embodiment of the position reference device include a seat locator attached to the rowing apparatus where the seat locator indicates the hip location of a rower positioned on a seat of the rowing apparatus and a hand locator attached to the rowing apparatus where the hand locator indicates hand position of the rower. The seat locator and hand locator are positioned relative to each other according to biometric data of the rower such that the position reference device indicates the rower's body position during at least one selected stroke point. The rowing apparatus may be either in a boat on the water or on a rowing machine.
- In an alternative embodiment of the position reference device, the seat locator is an adjustable guide bar having a first end and a second end, the adjustable guide bar attached to the seat at the first end and the hand locator is a cross bar attached substantially perpendicular to the second end of the guide bar. In a further alternative embodiment of the invention, the guide bar is shaped and configured to prevent axial rotation of the guide bar. A first example of such a shape and configuration is a guide bar that is oval in cross-section. A second example of such a shape and configuration is a guide bar that is rectangular in cross-section. The seat locator further includes an adjustment assembly attached to the seat. The adjustment assembly holds the guide bar and enables a tilt adjustment and an extension adjustment so that the position reference device may be fitted to the rower according to the rower's biometric data. The guide bar includes additional embodiments such as a further adjustment device to enable a height adjustment so that the cross bar may be raised or lowered according to the rower's biometric data.
- A first embodiment of the adjustment assembly includes an adjustment frame that saddles a rowing machine rail. The adjustment frame attaches to the side of the seat carriage for example via the axle bolts. In alternative embodiments of the invention, the adjustment frame attaches under the seat top, above the seat carriage. In one embodiment, the guide bar is attached at one side of the adjustment frame. The guide bar in one embodiment is attached to the adjustment frame with clamps. The adjustment frame further includes a slot and a hole configured to receive the clamps to allow for a tilt adjustment of the guide bar. In an alternative embodiment, the position reference device has two guide bars, one attached symmetrically on either side of the adjustment frame and the cross bar is attached between the two guide bars. The adjustment frame that symmetrically saddles the rowing machine rail provides balance to the position reference device. The second guide bar provides further balance and stability to the position reference device.
- In a further alternative embodiment of the adjustment frame, the adjustment assembly is a half saddle attached to the seat where the guide bar is attached to the half saddle in similar fashion as in the full saddle. This embodiment is less bulky and lighter than the full saddle embodiment.
- In a rowing machine embodiment of the position reference device, the cross bar is extended in length so that this extension spans across a second rowing machine located next to the rowing machine with the attached position reference device. The extended cross bar enables a second rower on the second rowing machine to operate the second rowing machine in synchronization with the rower on the rowing machine with the attached position reference device. Alternatively, a first and a second rowing machine are fitted with position reference devices where each position reference device includes an extension. The extensions are configured so that they are in proximity when the rowers row synchronously.
- In another rowing machine embodiment of the position reference device, the rowing machine includes a cable attached at a first end to a resistance wheel and a handle attached at a second end of the cable, the handle to be held by the rower. The seat includes rollers and the rowing machine further includes a rail along which the seat rolls. The seat locator has a first sensor to detect location of the seat relative to the rowing machine the hand locator has a second sensor to sense the handle position relative to the rowing machine. The sensors are coupled to a transmitter to transmit the data to a receiver. The transmitters may, for example, be for wired transmission or broadcast transceivers for wireless transmission. This embodiment also typically includes a display device coupled to the receiver to collect the data generated by all of the sensors. Batteries are included to power the sensors in a first embodiment. In an alternative embodiment, a power scavenging device, such as a solar collector, is included in the configuration to provide further energy. The power scavenging device can either augment battery power or replace it all together. The sensor embodiment allows the rower's position to be determined electronically and generates data that can be studied later as well as immediate feedback to the rower. Sensors and transmitters are similarly applied to a boat where the hand sensors are mounted such to sense the movement of the oar handle(s).
- In the embodiments of the position reference device in which sensors are used, the position reference device includes a computation device storing the biometric data of the rower, hand and seat locations for selected stroke points for specific rowers. This biometric data, such as height, inseam, and arm length for example, coupled with typical data covering the physical variation range of rowers adequately describes the body position of the rower. The computation device correlates sensor data with biometric data to determine the body position relative to the rowing device and the oar handle relative to the rowing device, processes this correlated data to classify the deviation and degree from proper rowing technique, such as over-reaching at the catch, grabbing, skying, shooting the slide as described above, and sending this classified and degreed data to the display device to display output of this correlated data in order to provide specific position feedback data to the rower.
- Various types of sensors may be used to determine provide hand and seat location. A first embodiment includes a gyroscope and an accelerometer combination. Typically a first gyroscope and first accelerometer is located in the seat and a second gyroscope and a second accelerometer is located in the rowing machine handle or in the oar attached to a boat. The gyroscope and accelerometer combination could instead be replaced by a global positioning sensor (GPS) in communication with global positioning satellites. On a rowing machine, the handle location may be detected by a chain length sensor, such as chain tooth counter or sprocket rotation counter, combined with chain angle sensor on the rowing machine chain. The position of the seat on either a rowing machine or a boat may be detected by a linear position encoder or by a rotation encoder using the rotation of the seat wheels.
- Another alternative embodiment of the position reference device includes a seat locator where the seat locator is a guide bar attached at a first end to the seat at the center front of the seat and where the hand locator is a transparent plate (alternatively, a screen) attached at the second end of the guide bar where the transparent plate has markings to indicate hand position. The transparent plate is centered with respect to the seat. The transparent plate includes indicator marking so that the rower can determine his or her proper hand position. One embodiment the transparent plate has markings for sculling while other embodiments have markings for sweep rowing. The guide bar is extendible forward and backward from the seat and the transparent plate may be raised or lowered on the guide bar thus providing adjustability according to the biometric characteristics of the rower.
- A further alternative boat embodiment of the position reference device includes a camera attached to the oarlock and facing the rower, the camera adjusted to encompass the rower in its field of view. The camera communicates with a display mounted within the confines of the boat. The display in one example embodiment is mounted at the rower's feet. Alternatively, the display is suitably mounted, permitting the rower clear view, to another rower in front of the rower being viewed by the camera. The camera further transmits data to a processing device that together with the rower's biometric data produces information about the rower's deviation from proper rowing technique. This information is in some embodiments displayed to the rower while rowing. Alternatively, the data is stored for later examination. A second camera also mounted on the oar lock and facing out provides a view of the oar position.
- The present invention together with the above and other advantages may best be understood from the following detailed description of the embodiments of the invention illustrated in the drawings, wherein:
-
FIG. 1 is a side view sketch of a conventional rowing machine; -
FIG. 2 is a side view sketch of a rowing machine including a position reference device according principles of the invention; -
FIG. 3 is a perspective view of the rowing machine ofFIG. 2 ; -
FIG. 4 is a perspective view of an alternative embodiment of the position reference device of the present invention; -
FIG. 5 is a side view of the embodiment of the position reference device ofFIG. 2 including a rower operating the rowing machine where the rower is positioned at the beginning of the drive portion of the rowing stroke, the “catch”; -
FIG. 6 is a side view of the position reference device ofFIG. 2 where the rower is positioned properly at the start of the back swing of the drive portion of the rowing stroke, “body-over”; -
FIG. 7 is a side view of the position reference device ofFIG. 2 where the rower is properly positioned at the back swing end of the drive portion of the rowing stroke, “hands- away”; -
FIG. 8 is a side view of the position reference device ofFIG. 2 where the rower is positioned properly at the end of the drive portion of the rowing stroke, the “finish”; -
FIG. 9 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by “over-reaching” at the catch portion of the rowing stroke; -
FIG. 10 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by using the back before the legs during the drive portion of the rowing stroke; -
FIG. 11 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by driving the legs without moving the rowing machine handle during the drive portion of the rowing stroke, “shooting the slide”; -
FIG. 12 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by pulling in with the arms during the drive portion of the rowing stroke while the legs are bent, “grabbing”; -
FIG. 13 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by hands too low at the finish of the drive portion of the rowing stroke, “washing out”; -
FIG. 14 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by hands too high at the finish of the drive portion of the rowing stroke, “digging at the finish”; -
FIG. 15 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by hands too low at the catch, “skying”; -
FIG. 16 is a perspective sketch of an alternative embodiment of the position reference device according to principles of the invention where the position reference device is attached to a rowing machine; -
FIG. 17 is a perspective sketch of another alternative embodiment of the position reference device ofFIG. 16 where the position reference device is attached to a rowing machine; -
FIG. 18 is a perspective sketch of a further alternative embodiment of the position reference device ofFIG. 17 where the position reference device is attached to a seat in a boat; -
FIG. 19A is a top view of a first alternative embodiment of the cross bar ofFIG. 18 for sculling; -
FIG. 19B is a top view of a second alternative embodiment of the cross bar ofFIG. 18 for a starboard sweep oar; -
FIG. 19C is a top view of a third alternative embodiment of the cross bar ofFIG. 18 for a port sweep oar; -
FIG. 20 is a perspective sketch of an alternative embodiment of the position reference device according to principles of the invention where the rower's position is indicated through electronics; -
FIG. 21 is a diagram of the hand position sensors of the position reference device ofFIG. 20 where the sensors are located inside the oar handle; -
FIG. 22 is a diagram of the hand position sensors of the position reference device ofFIG. 20 where the sensors are arranged in a configuration that is attached to the outside of the oar handle; -
FIG. 23 is a block diagram of the sensor configuration of the electronic position locator ofFIG. 21 ; -
FIG. 24 is a block diagram of the sensor configuration in a multiple rower boat; -
FIG. 25 is a sketch of an embodiment of the position reference device of the invention where a camera is used to determine the rower's body position; -
FIG. 26 is a sketch of an embodiment of the position reference device of the invention to be mounted in a boat where two cameras are used to follow the rower's movements; -
FIG. 27 is a block diagram of a computer used to process data received from the cameras ofFIGS. 25 and 26 ; and -
FIG. 28 is a rowing machine chain position detection device according to principles of the present invention. - The position reference device of the present invention includes a hand locator and a seat locator positioned relative to each other according to the rower's biometric data to indicate torso and hand positions of the rower over the course of the rowing stroke. The immediate feedback to the rower enables the rower to improve rowing technique while rowing. Embodiments for the rowing machine enable the rower to learn proper rowing technique when “rowing” off the water.
-
FIG. 1 is a side view sketch of aconventional rowing machine 100. Therowing machine 100 is the Indoor Rower fromConcept 2, Inc. of Vermont. This rowing machine is merely one example of a rowing machine that may be used in conjunction with the present invention. Other rowing machines are contemplated within the scope of the present invention. Therowing machine 100 has a slidingseat 105 mounted on arail 110. The slidingseat 105 usesrollers 115 to slide along therail 110. Therowing machine 100 includes aresistance device 120. Ahandle 125 attached to a cable 130 (or chain) is connected to theresistance device 120. - In operation, a rower on the
rowing machine 100 sits on the slidingseat 105 with his or her feet in thefoot stretchers 140 and holds thehandle 125. The rower “rows” on therowing machine 100 while sliding on the slidingseat 105 and pulling on thehandle 125. -
FIG. 2 is a side view sketch of therowing machine 100 including a position reference device according principles of the invention. The position reference device includes a seat locator attached to therowing machine 100 where the seat locator indicates the leg extension of a rower operating the rowing machine. The position reference device also includes a hand locator attached to therowing machine 100 where the hand locator indicates hand position of the rower operating therowing machine 100. In the embodiment of the position reference device shown inFIG. 2 , the seat locator is aguide bar 205 attached at theseat 105 and extending forward toward the front of therowing machine 100. The hand locator is across bar 210 attached substantially perpendicularly to theguide bar 205 at the forward end of theguide bar 205. Theguide bar 205 and thecross bar 210 are illustrated in perspective view inFIG. 3 . - The
guide bar 205 inFIG. 2 is attached at theseat 225 through a mountingframe 215 saddling therail 110. Theseat 225 rolls along therail 110 on acarriage 220 having rollers (not shown) similar to therollers 115 shown inFIG. 1 . The mountingframe 215 is mounted on thecarriage 220. The mountingframe 215 also holds aseat top 105. Accordingly the mountingframe 215 andseat top 105 together form the rower'sseat 225. The mountingframe 215 is mounted under theseat top 105 above the seat carriage using existing seat carriage mounting features. Alternatively, as shown inFIG. 16 , thecombination mounting frame 215 andadjustment bracket 520 is mounted to the side of the seat carriage, belowseat top 105, via the fixed axle bolts attaching therollers 115 to the seat carriage. Any attachment that provides a fixed reference with regard to theseat top 105 is contemplated within the scope of the invention. Theguide bar 205 is adjustable so that theguide bar 205 and thecross bar 210 are positioned relative to theseat 225 according to the rower's biometric data such that the position reference device indicates the rower's body position during at least one selected stroke point. Biometric data includes such measurements as the arm length, inseam and height of the rower. Examples of positioning for at least one selected stroke point are provided below inFIGS. 5-15 . - The
guide bar 205 is adjustable in length in the present embodiment at aclamp 230 on theadjustment bracket 245, which attached to the mountingframe 215 byadjustment screws 235, that enables theguide bar 205 to be adjusted forward or backward according to the rower's biometric data. Other ways of adjusting theguide bar 205 are possible. One example of an alternative length adjustment scheme is a telescoping joint. The invention is not limited to theclamp 230 shown here. The present embodiment provides height adjustment of thecross bar 210 with respect to theseat 225 by a tilt adjustment of theguide bar 205, which connects to thecross bar 210 at one end, according to the rower's biometric data. This tilt adjustment is accommodated by thetilt slot 240 in theadjustment bracket 245. Theguide bar 205, which is attached to theadjustment bracket 245 withclamp 230, is tilted by rotation of theadjustment bracket 245 abouthole 250 withscrew 235 throughhole 250 acting as rotational pin guided by the arcedslot 240 and thecorresponding screw 235 acting as a slot guide pin. An alteration in the tilt of theguide bar 205 raises or lowers thecross bar 210 as needed to indicate hand position of the rower according to the rower's biometric data. Once the desired height is achieved in this described tilting motion, thescrews 235 are tightened to maintain the height adjustment. The height adjustment scheme shown in the present embodiment is merely exemplary. Other height adjustment schemes are possible within the scope of the invention. For example, an additional adjustment joint could be added to the guide bar itself to provide variation in height of thecross bar 210. Theguide bar 205 may also include a breakaway joint for safety purposes. Alternatively, theguide bar 205 may be made of a flexible material maintain appropriate stiffness to shape and affix clamps. - In alternative embodiments of the invention, the
guide bar 205 is shaped and configured to prevent rotation of theguide bar 205 with respect to theadjustment bracket 245. For example, theguide bar 205 could be oval-shaped in cross-section. Alternatively, theguide bar 205 could be rectangular in cross-section. These alternative embodiments are merely exemplary. Alternative guide bar cross-sectional shapes are contemplated within the scope of the invention. A further alternative embodiment to prevent the rotation of the guide bar with respect to theadjustment bracket 245 is a pin inserted through theguide bar 205 andadjustment bracket 245. - While the mounting
frame 215 shown inFIG. 2 (alsoFIG. 3 in perspective view) extends over therail 100 at both sides, the mountingframe 215 could, in an alternative embodiment be a half-frame holding theseat top 105 and extending over only one side of therail 100. This embodiment, however, is not as balanced as the mountingframe 215 shown inFIGS. 2 and 3 and this configuration may unevenly wear theseat rollers 115 and therail 100. - In a further alternative embodiment of the invention, the length of the
cross bar 210 is extended so that thecross bar 210 extends over a second rowing machine positioned next to and aligned parallel to thefirst rowing machine 100. This embodiment enables a second rower operating the second rowing machine to row in synchronization with the first rower operating the first rowing machine. This embodiment further includes a breakaway joint in thecross bar 210 for safety purposes. In a still further embodiment of the invention, the extension extends to within close proximity of a similar extension from the second rowing machine having its own position reference device so that each rower can see whether or not rowing is being performed in synchronicity. -
FIG. 4 is a perspective view of an alternative embodiment of the position reference device of the present invention. That is,FIG. 4 shows a perspective view of therowing machine 100 including an alternative embodiment of the position reference device of the present invention. The embodiment shown inFIG. 4 includes theguide bar 205 andcross bar 210 of the embodiment shown inFIG. 2 . Theguide bar 105 is attached to theadjustment bracket 245, which is attached to mountingframe 215, as described with regard toFIG. 2 . The present embodiment of the invention further includes asecond guide bar 300 attached at a first end to the second adjustment bracket 405, which is attached to the mountingframe 215 in similar fashion to thefirst adjustment bracket 245. Thesecond guide bar 300 is attached at its second end to thecross bar 210. Thesecond guide bar 300 provides a further balancing factor to the position reference device. -
FIG. 5 is a side view of the embodiment of the position reference device ofFIG. 2 including arower 400 operating therowing machine 100 where therower 400 is positioned at the beginning of the drive portion of the rowing stroke at the “catch.” Therower 400 sitting on theseat 225 is compressed forward with the arms extended straight away. Theguide bar 205 andcross bar 210 have been positioned so that the rower's hands are located under thecross bar 210 at this point of the stroke. -
FIG. 6 is a side view of the position reference device ofFIG. 2 where therower 400 is positioned properly at the start of the back swing of the drive portion of the rowing stroke in the “body over” position. Theguide bar 205 andcross bar 210 are positioned as inFIG. 4 . Therower 400 has begun the drive portion of the stroke by extending his legs but has not yet pulled back from the forward-leaning position. Therower 400 has maintained proper position by keeping his hands under thecross bar 210. -
FIG. 7 is a side view of the position reference device ofFIG. 2 where therower 400 is properly positioned at the back swing end of the drive portion of the rowing stroke at the “hands-away” position. Theguide bar 205 andcross bar 210 are positioned as inFIG. 4 . Therower 400 has reached full leg extension in the drive and has completed his back pull. This caused the rower's hands (pulling on thehandle 125 of the rowing machine 100) to come back from thecross bar 210. Thecross bar 210 continues to indicate whether the rower's hands are in proper position because the chain 130 (alternatively, a cable) of therowing machine 100 remains at even height under thecross bar 210. -
FIG. 8 is a side view of the position reference device ofFIG. 2 where the rower is positioned properly at the end of the drive portion of the rowing stroke at the “finish.” Theguide bar 205 andcross bar 210 are positioned as inFIG. 5 . Therower 400 has completed the leg extension and back swing of the drive and has additionally pulled his arms and hands (grasping the rowing machine handle 125) in towards his body. Thecross bar 210 continues to indicate whether the rower's hands are in proper position because thechain 130 of therowing machine 100 remains at even height under thecross bar 210. -
FIG. 9 is a side view of the position reference device ofFIG. 2 where therower 400 is improperly positioned by over-reaching at the catch portion of the rowing stroke. Theguide bar 205 andcross bar 210 are positioned as inFIG. 5 . Therower 400 is overly compressed with the shoulders dropped at the beginning of the drive portion of the stroke and this is indicated by the rower's hands (holding the rowing machine handle 125) are beyond thecross bar 210. -
FIG. 10 is a side view of the position reference device ofFIG. 2 where therower 400 is improperly positioned by using the back before the legs during the drive portion of the rowing stroke. Theguide bar 205 andcross bar 210 are positioned as inFIG. 5 . Therower 400 has started the back swing before the leg extension which is indicated by the rower's hands (holding the rowing machine handle 125) coming back from thecross bar 210 before the legs are extended. -
FIG. 11 is a side view of the position reference device ofFIG. 2 where therower 400 is improperly positioned by driving the legs without moving the rowing machine handle 125 during the drive portion of the rowing stroke “shooting the slide.” Theguide bar 205 andcross bar 210 are positioned as inFIG. 5 . The improper position of therower 400 is indicated by thecross bar 205 coming forward over the rower's arms during the leg extension portion of the stroke. -
FIG. 12 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by grabbing with the arms during the drive portion of the rowing stroke, “grabbing” at the catch. Theguide bar 205 andcross bar 210 are positioned as inFIG. 5 . Therower 400 has initiated the drive portion of the stroke with the arms. The improper position of therower 400 is indicated by the rower's hands (holding the rowing machine handle 125) pulled away from thecross bar 210. -
FIG. 13 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by hands too low at the finish of the drive portion of the rowing stroke, “washing out.” Theguide bar 205 andcross bar 210 are positioned as inFIG. 5 . Therower 400 has completed the leg extension and back swing of the drive but the rower's hands are pulled too low toward the rower's body. This is indicated by the relative position of thechain 130 of therowing machine 100 with respect to thecross bar 210. Thechain 130 when therower 400 maintains proper hand height during the drive should remain at a constant height with respect to thecross bar 210. -
FIG. 14 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by hands too high at the finish of the drive portion of the rowing stroke “digging” at the finish. Theguide bar 205 andcross bar 210 are positioned as inFIG. 5 . Therower 400 has completed the leg extension and back swing of the drive but the rower's hands are pulled too high on the rower's body. This is indicated by the relative position of thechain 130 of therowing machine 100 with respect to thecross bar 210. Thechain 130 when therower 400 maintains proper hand height during the drive should remain at a constant height with respect to thecross bar 210. -
FIG. 15 is a side view of the position reference device ofFIG. 2 where the rower is improperly positioned by hands too low at the catch, “skying.” Theguide bar 205 andcross bar 210 are positioned as inFIG. 5 . Therower 400 is compressed forward with arms straight forward. The rower's hand (holding thehandle 125 of the rowing machine 100) are positioned under thecross bar 210 but are positioned too low under the cross bar. - The indicators provided by the position reference device are merely examples. The position reference device can be used to indicate other proper or improper rowing technique. Additionally, the
cross bar 210 could be positioned below the rower's hands and effectively indicate proper or improper rowing technique. In a further alternative embodiment of the invention, there are two cross bars, one above the rower's hands and one below the rower's hands. In a still further embodiment of the invention, additional indicators extending from theguide bar 205 indicate other joint and body centers such as head and shoulders. -
FIG. 16 is a perspective sketch of an alternative embodiment of the position reference device according to principles of the invention where the position reference device is attached to therowing machine 100. In this embodiment, theguide bar 205 is extended and turned back on itself at the seat end of theguide bar 205. The seat end of theguide bar 205 is then attached to the combination mounting frame andadjustment bracket 520. In this embodiment, the combination mounting frame andadjustment bracket 520 is mounted to the side of the seat carriage, belowseat top 105, via the fixed axle bolts attaching therollers 115 to theseat carriage 220. Theguide bar 205 is attached to the combination mounting bracket and adjustment bracket byclamps 505. Thecross bar 210 is attached substantially perpendicular to theguide bar 205 as inFIG. 2 . Theguide bar 205 and thecross bar 210 in this embodiment may be extended forward and back by sliding theguide bar 205 forward and back in theclamps 505. Height adjustment is accomplished similarly toFIG. 2 , discussed above, by athird clamping screw 505 guiding an arced slot in the combination mounting frame andadjustment bracket 520. -
FIG. 17 is a perspective sketch of another alternative embodiment of the position reference device ofFIG. 16 where the position reference device is attached to therowing machine 100. In this embodiment, the position reference device includes theguide bar 205 and thecross bar 210. A first end of theguide bar 205 is attached to theseat 225 at the middle front with afirst clamp 510. Theguide bar 205 is typically made of a lightweight material but material having sufficient stiffness to hold clamps. Thecross bar 210 is attached substantially perpendicular to theguide bar 205 at a second end of theguide bar 205. Thecross bar 210 in this embodiment is attached to theguide bar 205 with asecond clamp 515. Thefirst clamp 510 enables theguide bar 205 to be extended forward or backward. Thesecond clamp 515 enables thecross bar 210 to be raised or lowered on theguide bar 205. Using theclamps guide bar 205 andcross bar 210 can be adjusted in both length and height according to the rower's biometric data. In this embodiment, theguide bar 205 andcross bar 210 are adjusted such that the rower's hands move over thecross bar 210 and theguide bar 205 rather than under the guide bar. In an alternative embodiment of the invention, as it pertains to usage on a rowing machine, thecross bar 210clamp 515 mounting feature is extended well below thecross bar 210 to allow for telescoping adjustment of thecross bar 210 height along a shortenedguide bar 205 when thecross bar 210 is positioned below the hands to prevent interference with therowing machine handle 125. In an alternative embodiment of the invention, as it pertains to usage on a rowing machine, the cross bar is shaped, for example, in a “question mark”-shape to prevent interference with the rower's hands on the rowing machine handle 125 while maintaining the over-the-hands cross bar reference and the cross bar is adjustably attached to a shortenedguide bar 205 byclamp 515 below the lowest possiblerowing machine chain 120 height. -
FIG. 18 is a perspective sketch of a further alternative embodiment of the position reference device ofFIG. 17 where the position reference device is attached to aseat 605 in aboat 600. Only the section of theboat 600 where theseat 605 is attached is shown in this illustration. In this embodiment, the position reference device includes theguide bar 205 and alternative embodiment of across bar 615. Theguide bar 205 is attached at a first end to the seat in similar fashion to the embodiment shown inFIG. 17 . Thealternative cross bar 615 is attached substantially perpendicular to theguide bar 205. Theguide bar 205 andalternative cross bar 615 are adjustable according to the rower's biometric data. Theguide bar 205 can be moved forward and backward at the seat and thealternative cross bar 615 can be adjusted up or down on theguide bar 205. Thealternative cross bar 615 is a transparent plate 620 with markings as shown inFIGS. 19A, 19B and 19C. The rower is able to view his or her hands through the transparent plate 620 and the markings enable the rower to determine whether he or she is rowing with proper technique. In alternative embodiments of the invention, the transparent plate 620 is a translucent plate with markings or a screen with markings. The screen, in particular, has the advantages that it is non-glare and can be light in weight. -
FIG. 19A is a top view of a first embodiment of the transparent plate 620 ofFIG. 18 . The transparent plate 620 hasmarkings markings 655, positioned towards the stern of the boat, indicate proper position for each hand on its oar at a selected point of the oar stroke, such as the catch. The marking 650 is positioned toward the bow of the boat indicates the second selected point of the oar sequence, such as the hands-away body forward position. -
FIG. 19B is a top view of the cross bar of the transparent plate 620 ofFIG. 18 for a starboard sweep oar. The transparent plate 620 hasmarkings markings 660, positioned towards the stern of the boat, indicate proper position for the starboard sweep oar at a selected point of the oar stroke, such as the catch. The marking 650 is positioned toward the bow of the boat indicates the second selected point of the sweep oar sequence, such as the hands- away body forward. -
FIG. 19C is a top view of the cross bar of the transparent plate 620 ofFIG. 18 for a port sweep oar. The transparent plate 620 hasmarkings markings 665, positioned towards the stem of the boat, indicate proper position for the port sweep oar at a selected point of the oar stroke, such as the catch. The marking 650 is positioned toward the bow of the boat indicates the second selected point of the sweep oar sequence, such as the hands- away body forward position. -
FIG. 20 is a perspective sketch of an alternative embodiment of the position reference device according to principles of the invention where the rower's position is indicated through electronics. A portion of theboat 600 is shown. In one embodiment, the seat position is determined by monitoring the rotation of thewheel 702 withsensor 700 attached to theseat 725. In another embodiment, the seat position is determined withoptical sensor 705 attached to theseat 725 viewingposition indicator strip 707. The described electronic measurement means of the seat position are exemplary and other means for measurement are possible. Arigger 720 attached to theboat 600 holds anoar 730. A third sensor and a fourth sensor (shown inFIG. 20 ) are mounted inside theoar handle 710. Alternatively, afifth sensor 735 and asixth sensor 740 located onrigger 720near oar lock 745.Foot stretchers 715 are attached to theboat 600 forward of therigger 720. In one embodiment the third sensor, a gyroscope, and the fourth sensor, an accelerometer, determine the position of the hands by determining the position of the oar handle in space. In second embodiment the fifth sensor, an electronic oar lock angle measurement, and the sixth sensor, an electronic oar pitch measurement with respect to therigger 720, determine the position of the hands by determining the position of the oar with respect to therigger 720. The sensors in theseat 725 and in the either the oar handle 710 or by theoar lock 735 locate the seat and the rower's hands with respect to thefoot stretchers 715. The sensors provide continuous location data of the rower's position over the course of each oar stroke. The sensors are typically associated with wireless transmitters that transmit the position data to a receiver. The received data is used to determine the position of the rower's body, which compared against correct positions for the rower. Generally, deviations from proper rowing technique are displayed on a display device to provide feedback to the rower. Full rower data is stored for later detailed analysis of the rower's body position through many complete rowing strokes. - In an alternative embodiment of the gyroscope and accelerometer combination is replaced by a global position reference device sensor sensing the location of the oar handle.
-
FIG. 21 is a diagram of the hand position sensors of the position reference device ofFIG. 20 where the sensors are located inside the oar handle. Agyroscope 750, anaccelerometer 755, abattery 760, awireless transmitter 765 and amicroprocessor 770 are embedded in theoar handle 710. Thegyroscope 750 andaccelerometer 755 sense the location of the oar handle 710 and therefore the rower's hand(s) with respect to the foot stretchers 715 (shown inFIG. 20 ). The data from thesensors microprocessor 770 to determine the oar position in space. This processed data is transmitted by thewireless transmitter 765 to a receiving device within the display unit (not shown) or to another receiver. Thegyroscope 750,accelerometer 755,wireless transmitter 765 andmicroprocessor 770 are powered by thebattery 760. Thebattery 760 could be a typical chemical battery, solar cell, a novel power scavenging device or any combination of power sources. Thegyroscope 750,accelerometer 755,battery 760 andwireless transmitter 765 may also be used in the handle of the rowing machine. Alternatively, thewireless transmitter 765 can be a wired transmitter. -
FIG. 22 is a diagram of the hand position sensors of the position reference device ofFIG. 21 where the sensors are located in a configuration that is attached to the outside of the oar handle. Thegyroscope 750, theaccelerometer 755, thebattery 760, thewireless transmitter 765 and themicroprocessor 770 ofFIG. 20 are embedded in a torus-shapedform 775 that can be slipped onto the oar handle 710 and fastened there. -
FIG. 23 is a block diagram of the hand locator and seat locator sensor configuration. Theelectronic seat locator 900 includes aseat position sensor 905 and a firstdata communication device 910. Anelectronic hand locator 915 includes anoar position sensor 920 and asecond communication device 925. Thefirst communication device 910 and thesecond communication device 925 communicate with acentral data device 930. Thecentral data device 930 includes a thirddata communications device 935, abiometric storage device 940, aposition calculation device 945, adata storage device 950, a display datadevice formatting device 955 and aninformation display device 960. In operation, the thirddata communications device 935 receives data from the first andsecond communications devices position calculation device 945 calculates position data using the received data and rower biometric data stored in thebiometric data device 940. Thecentral data device 930 stores the position data in thedata storage device 950. The displaydata formatting device 955 formats the position data for display on theinformation display device 960. The data is stored indata storage device 950 so that the data may be later downloaded and reviewed. -
FIG. 24 is a block diagram of the sensor configuration ofFIG. 23 including a plurality of seat and hand locator devices. -
FIG. 25 is a sketch of an embodiment of the positioning device of the invention where a camera is used to determine the rower's body position. In this embodiment, hand and seat location are determined by taking an image of the rower in motion and measuring the positions of the hands and seat relative to a fixed reference on therowing machine 100 orboat 600, such as thefoot stretchers camera 580 as shown inFIG. 25 is placed a distance away from the rowing machine or on a fixed reference from a rower seated in a boat such that the camera field ofview 585 encompasses the entire length of the seated rower's stroke. The camera takes a number of sequential images of the rower as the rowing stroke is executed. After each image is acquired, the camera transfers the image to a sufficiently high-speed computer 590, such as a desktop, laptop, or handheld computer to process the image. Appropriate signal processing will detect the rower's body position, such as the hands, arms, legs, and torso, in relation to features of the rowing device, such as the seat and foot stretcher. The signal processing will determine the hands and seat locations relative to the fixed reference on the rowing device for each image. Biometric data stored for the seated rower determines the proper hand and body positions as discussed above with regard toFIGS. 5-17 . For coaching considerations, the desired rowing positions may be calibrated at positions throughout the rowing stroke for the seated rower. The measured position of the hands and seat relative to the fixed reference on the rowing device, such the foot stretcher, compared to the rower's biometric data determines whether there is deviation from proper rowing technique, These parameters also determine the degree of deviation. Various configurations of displayed results are possible. The displayed results may include actual rowing strokes with a stick figure indicating the proper rower position, pictorial highlights indicating the deviation from ideal position and accentuated highlights to indicate the degree of deviation, or signals to indicate the deviations and degree thereof. The display may instead be of the acquired image data directly without technical critique. The display is any form of information display device formatted appropriately to display continuously updated results, for example, a desk top, laptop or handheld computer display. The display is oriented so that the rower could receive feedback while rowing and data saved for review after the workout is complete. -
FIG. 26 is a further embodiment of the camera system ofFIG. 25 for on the water usage. As shown inFIG. 26 , the hand and body positions of a rower seated onseat 725 inboat 600 are obtained by acquiring a number of sequential images of the rower with acamera 560 mounted onoar lock 745 throughout the rowing stroke. Thecamera 560 is mounted on a moving reference, theoar lock 745, synchronized to the sweep angle of therowing oar 730. Thecamera 560 is positioned in such a way to capture the rower's body position centered within the field of view of thecamera 560 while the rower is holding theoar handle 710. Thecamera 560 mounting fixture on the movingreference 745 is attached without interference to any of the rowing mechanisms, such asrigger 720,oar 730, andoar lock 745, throughout the rowing stroke. As the oar moves, thecamera 560 will capture images of the hands, body and boat positions as referenced to theoar 730. Asecond camera 570 may additionally be attached to the moving reference,oar lock 745, without creating interference with the rowing mechanisms. Thesecond camera 570 is mounted in such a way to capture the end of the oar, blade, and water centered within the field of view of thecamera 570. Thissecond camera 570 views the action of theoar 730 throughout the rowing stroke. The data fromcameras FIG. 25 . The data fromcamera boat 600 above thefoot stretchers 715 for view by the seated rower.FIG. 26 is exemplary of port sweep oar and rowing in the starboard configuration follows as above with the rowing mechanisms and camera(s) on the opposite side and rowing in the sculling configuration follows as above with the rowing mechanisms and camera(s) on both sides. -
FIG. 27 is a block diagram of thecomputer 590 used to process data received from the cameras ofFIGS. 25 and 26 . Thecomputer 590 includes aprocessor 1100, astorage device 1115 storing rower biometric data 1135, and amemory 1120. Theprocessor 1100 includes ahand position subprocessor 1105 and aseat position subprocessor 1110. Thecomputer 590 further includes an input/output interface 1125 through which thecomputer 590 communicates to thecameras display 1130. In operation, theprocessor 1100 receives data from at least thecamera 560 capturing images of the rower. Thehand position subprocessor 1105 calculates the hand position relative to the rowing device from the captured image. Theseat position subprocessor 1110 calculates the seat position relative to the rowing device from the captured image. The hand and seat positions reported bysubprocessors processor 1100 to produce data about the rower's deviation from proper rower technique. This deviation data can be stored in thestorage device 1115 for later examination. The images from the camera and any data stored on or produced by thecomputer 590 may be displayed on thedisplay 1130. Other locations of the rower's body in space are also possible within the scope of the invention. The present invention is not limited to hand and seat locations but could determine any point such as the rower's head or shoulders. -
FIG. 28 is a rowing machine chain position detection device according to principles of the present invention. In an alternative embodiment, pertaining to the rowing machine, the position of the hands holding the rowing machine handle 125 as inFIG. 2 are sensed electronically by measuring the length of therowing machine chain 130 and the angle therowing machine chain 130 makes with respected to axle of therowing machine 100 resistance wheel throughout the entire rowing sequence. To determine the angle and length of the rowing machine chain, a fixed measurement plane, for example thechain aperture 260 as shown inFIGS. 3, 4 and 28, between therowing machine handle 125 and the axle of therowing machine 100 resistance wheel is selected. The length of therowing machine chain 130 is measured by counting the number of links passing through the fixedmeasurement plane 260 and multiplying by the link length, which is a known characteristic length. The angle of therowing machine chain 130 is determined geometrically by measuring the vertical displacement of therowing machine chain 130 within the fixedmeasurement plane 260 correlated to the distance from the fixedmeasurement plane 260 to the center of rotation of therowing machine 100 resistance wheel. - To measure the length of the
rowing machine chain 130, anillumination device 800 shown inFIG. 28 , which is driven by asource driver 805, illuminates the fixedmeasurement plane 260 shining light through the link openings inrowing chain 130. Thesingle illumination device 800 is exemplary and multiple illumination devices are possible. The light passing through therowing chain 130 illuminates thefirst light sensor 810 and the secondlight sensor 815, which is directly behind thefirst light sensor 810. Thefirst light sensor 810 senses intensity changes as the links inrowing machine chain 130 pass through the fixedmeasurement plane 260. The secondlight sensor 815 also senses intensity changes as therowing machine chain 130 but by being displaced behind thefirst sensor 810, thesecond sensor 815 detects the direction therowing machine chain 130 is traveling. The electronic signals fromlight sensors rowing machine chain 130 displaced during the rowing cycle. - To measure the angle of the
rowing machine chain 130,illumination devices 820 shown inFIG. 28 , which are driven bysource driver 825, illuminates the fixedmeasurement plan 260 horizontally. The number ofillumination devices 820 as illustrated inFIG. 27 are exemplary and any number of illumination devices are possible. The light fromillumination devices 820 impinges therowing machine chain 130, which blocks a portion of the intensity profile from theillumination devices 820. Thelight sensors 830 shown inFIG. 27 receive the intensity profile from theillumination devices 820 partially blocked by therowing machine chain 130. Over multiplelight sensors 830, the detected intensity profile is sampled indicating the position of the intensity dip due to the occlusion of the illumination profile by therowing machine chain 130. The relative intensities received by each sensor determine the position of therowing machine chain 130 within the fixed measurement plane. The electronic signals fromlight sensors 830 are passed, appropriately detected and filtered so that the analog signals can be quantized and processed by the microprocessor. The microprocessor determines the vertical displacement of the intensity dip in the illumination profile and then calculates the angle of therowing machine chain 130 by geometric relationship to the center of rotation of therowing machine 100 resistance wheel. - The hand locator sensors and seat locator sensors described above may be similarly applied to the
rowing machine 100. - It is to be understood that the above-identified embodiments are simply illustrative of the principles of the invention. Various and other modifications and changes may be made by those skilled in the art which will embody the principles of the invention and fall within the spirit and scope thereof. For example, one alternative embodiment for a rowing machine includes a display device mounted to the cross bar so that the rower may view the data while rowing on the rowing machine without turning his or her head to the side.
Claims (50)
1. A position reference device for a rowing apparatus, comprising:
a seat locator attached to the rowing apparatus, the seat locator to indicate hip location of a rower positioned on a seat on the rowing apparatus; and
a hand locator attached to the rowing apparatus to indicate hand position of the rower, the seat locator and hand locator positioned relative to each other according to biometric data of the rower such that the position reference device indicates the rower's body position during at least one selected stroke point.
2. The position reference device of claim 1 wherein the seat locator further comprises an adjustable guide bar having a first end and a second end, the adjustable guide bar attached to the seat at the first end; and
wherein the hand locator further comprises a cross bar attached substantially perpendicular to the second end of the guide bar.
3. The position reference device of claim 2 wherein the adjustable guide bar is shaped and configured to prevent axial rotation of the guide bar.
4. The position reference device of claim 2 wherein the rowing apparatus is a rowing machine.
5. The position reference device of claim 4 wherein the seat locator further comprises an adjustment assembly attached to the rowing apparatus at the seat, the adjustment assembly to hold the guide bar at the first end, the adjustment assembly configured to enable an extension adjustment of the guide bar.
6. The position reference device of claim 5 wherein the adjustment assembly is further configured to enable a tilt adjustment of the guide bar.
7. The position reference device of claim 6 wherein the guide bar is extendible to enable height adjustment of the hand locator.
8. The position reference device of claim 7 wherein the guide bar has a telescoping portion that enables the height adjustment of the hand locator.
9. The position reference device of claim 5 wherein the adjustment assembly further comprises an adjustment frame holding a seat top while saddling a rail positioned underneath the seat on which the seat slides, the adjustment frame having two sides positioned on either side of the rail, one of the sides of the adjustment frame configured to adjustably hold the guide bar.
10. The position reference device of claim 5 wherein the guide bar is a first guide bar attached to one side of the seat;
wherein the position reference device further comprises a second guide bar substantially similar to the first guide bar similarly attached to an opposing side of the seat from the first guide bar; and
wherein the cross bar is attached between the first guide bar and the second guide bar.
11. The position reference device of claim 5 wherein the seat rolls on the rail on wheels having bearings and wherein the adjustment assembly further comprises a single-side adjustment frame that is a half saddle attached to the seat at the seat bearings, the half saddle hanging over one side of the rail and wherein the guide bar is attached to the half saddle.
12. The position reference device of claim 9 wherein the side holding the adjustment assembly includes two clamps configured to receive and retain the guide bar and a slot and a hole to receive the clamps, the clamps configured to be tightened in position in the slot and the hole, the slot, the hole, and clamps providing tilt and extension adjustment of the guide bar.
13. The position reference device of claim 9 wherein the cross bar is extended such that a second rower on the second rowing machine can operate the second rowing machine in synchronicity with the rowing machine holding the position reference device.
14. The position reference device of claim 4 wherein the rowing machine includes a cable attached at a first end to a resistance wheel and including a handle attached at a second end of the cable, the handles to be held by the rower, and the seat further includes rollers and the rowing machine further comprises a rail along which the seat rolls,
wherein the seat locator comprises a first sensor to detect location of the seat relative to the rowing machine; and
wherein the hand locator comprises a second sensor to sense the handle position relative to the rowing machine.
15. The position reference device of claim 14 further comprising a display device coupled to a receiver and wherein the first sensor is coupled to a first transmitter that transmits first sensor data to the receiver and wherein the second sensor is coupled to a second transmitter that transmits second sensor data to the receiver, the display device to display the first sensor data and the second sensor data.
16. The position reference device of claim 15 wherein the first transmitter and the second transmitter and the receiver are wireless.
17. The position reference device of claim 15 wherein the display device is coupled to a computation device storing the biometric data of the rower and hand and seat locations for selected stroke points for specific rowers, the computation device to correlate sensor data with biometric data and the display device to display output of the correlated sensor and biometric data.
18. The position reference device of claim 14 wherein the second sensor is a chain position sensor
wherein at least one light source illuminates the link openings of a chain and at least one detector senses the light passing through the chain and the transitions in the detector signal are counted; and
wherein at least one light source illuminates the solid side of a chain and a plurality of detectors sense the light pattern detected by the plurality of detectors and the minimum in the detected light pattern indicates the position of the chain relative to the plurality of detectors.
19. The position reference device of claim 14 wherein the first sensor is a linear position encoder.
20. The position reference device of claim 14 wherein the first sensor is a rotation encoder.
21. The position reference device of claim 14 wherein the first sensor is a gyroscope and an accelerometer.
22. The position reference device of claim 14 wherein the second sensor is a gyroscope and an accelerometer.
23. The position reference device of claim 14 wherein the first sensor is a first GPS device.
24. The position reference device of claim 2 where the rowing apparatus is a boat.
25. The position reference device of claim 24 wherein the seat locator further comprises
a guide bar having a first end and a second end, the guide bar attached at the first end to the seat at the center front of the seat; and
the hand locator further comprises a transparent plate attached at the second end of the guide bar, the transparent plate having markings to indicate hand position.
26. The position reference device of claim 25 wherein the transparent plate is centered with respect to the seat.
27. The position reference device of claim 25 wherein the transparent plate is positioned off- center with respect to the seat.
28. The position reference device of claim 25 wherein the transparent plate is a screen.
29. The position reference device of claim 25 wherein the guide bar is flexible.
30. The position reference device of claim 29 wherein the guide bar further comprises at least one flexible joint.
31. The position reference device of claim 25 wherein the boat further includes at least one seat that slides along rails attached to the boat and wherein the rower rows with at least one oar having a handle,
wherein the seat locator comprises a first sensor to indicate the position of the seat relative to the boat; and
wherein the hand locator comprises a second sensor to indicate the position of the oar relative to the boat.
32. The position reference device of claim 31 wherein the hand locator further comprises a battery and a wireless transmitter to transmit data to a rower feed back device.
33. The position reference device of claim 32 wherein the hand locator further comprises a solar collector to power the hand locator.
34. The position reference device of claim 32 wherein the hand locator is configured inside the oar handle.
35. The position reference device of claim 32 wherein the hand locator is configured inside a torus-shaped form that is configured to fit over the oar handle.
36. The position reference device of claim 31 wherein the rower rows with two oars wherein each of the oars includes a hand locator.
37. The position reference device of claim 31 wherein the first sensor is a linear position encoder.
38. The position reference device of claim 31 wherein the first sensor is a rotation encoder.
39. The position reference device of claim 31 wherein the first sensor is a gyroscope and an accelerometer.
40. The position reference device of claim 31 wherein the second sensor is a gyroscope and an accelerometer.
41. The position reference device of claim 31 wherein the second sensor is a GPS device.
42. The position reference device of claim 31 wherein the second sensor comprises an angle sensor to measure the sweep angle of the oar and angle sensor to measure the tilt of the oar.
43. A position reference device for a rowing boat, comprising:
a fixed reference on the rowing apparatus;
a camera located at the fixed reference, the camera to take a plurality of sequential images of a rower operating the rowing boat; and
a display device located in the rowing boat to receive the images from the camera, the display device viewable by the rower.
44. The position reference device of claim 43 further comprising:
a computer to receive and process the sequential images from the camera and to detect hand position and seat position of the rower with regard to the fixed reference point.
45. The fixed reference of claim 43 is the oar lock.
46. The fixed reference of claim 43 is the rigger.
47. The position reference device of claim 43 further comprising:
a second camera located at the fixed reference, the second camera to take a plurality of sequential images of an oar used by the rower.
48. The position reference device of claim 31 further comprising a display device coupled to a receiver and wherein the first sensor is coupled to a first transmitter that transmits first sensor data to the receiver and wherein the second sensor is coupled to a second transmitter that transmits second sensor data to the receiver, the display device to display the first sensor data and the second sensor data.
49. The position reference device of claim 48 wherein the first transmitter and the second transmitter and the receiver are wireless.
50. The position reference device of claim 48 wherein the display device is coupled to a computation device storing the biometric data of the rower and hand and seat locations for selected stroke points for specific rowers, the computation device to correlate sensor data with biometric data and the display device to display output of the correlated sensor and biometric data.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/966,253 US20050085348A1 (en) | 2003-10-17 | 2004-10-15 | Apparatus for the improvement of rowing technique |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US51187603P | 2003-10-17 | 2003-10-17 | |
| US10/966,253 US20050085348A1 (en) | 2003-10-17 | 2004-10-15 | Apparatus for the improvement of rowing technique |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| US20050085348A1 true US20050085348A1 (en) | 2005-04-21 |
Family
ID=34465287
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US10/966,253 Abandoned US20050085348A1 (en) | 2003-10-17 | 2004-10-15 | Apparatus for the improvement of rowing technique |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20050085348A1 (en) |
| WO (1) | WO2005037379A2 (en) |
Cited By (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050170711A1 (en) * | 2004-01-29 | 2005-08-04 | Spencer Robert M. | Method and apparatus of information systems for rowers |
| US20050215870A1 (en) * | 2004-03-19 | 2005-09-29 | Rademaker William B | System for monitoring physical parameters of individuals performing physical activities and apparatus for indicating oar positions |
| US20060166798A1 (en) * | 2004-01-05 | 2006-07-27 | Nelson Robert W | Abdominal exercise machine |
| US20070032143A1 (en) * | 2005-08-03 | 2007-02-08 | Short Andrew L B | Visual sports training apparatus and method |
| US20070149370A1 (en) * | 2005-01-05 | 2007-06-28 | Wallace Brown | Abdominal exerciser device |
| US7485079B2 (en) | 2005-01-05 | 2009-02-03 | Ab Coaster Holdings, Inc. | Abdominal exercise machine |
| US20090156362A1 (en) * | 2005-04-05 | 2009-06-18 | Yoyo Technology Ab Regeringsgatan | Method and Tool for Exercising Muscles |
| US7611445B2 (en) | 2004-01-05 | 2009-11-03 | Ab Coaster Holdings, Inc. | Abdominal exercise machine |
| WO2010037176A1 (en) * | 2008-10-02 | 2010-04-08 | Yepp Australia Pty Ltd | Imaging system |
| US20100190615A1 (en) * | 2009-01-23 | 2010-07-29 | Accelerate Inc. | Energy absorbing suspension equipment for rowing and general exercise machines |
| USD660383S1 (en) | 2010-12-03 | 2012-05-22 | Icon Ip, Inc. | Dual curved support for an exercise device |
| US8192242B2 (en) | 2008-12-29 | 2012-06-05 | Luecker Michael C | Force sensing oar |
| US20120183940A1 (en) * | 2010-11-05 | 2012-07-19 | Nike, Inc. | Method and system for automated personal training |
| US20120183939A1 (en) * | 2010-11-05 | 2012-07-19 | Nike, Inc. | Method and system for automated personal training |
| US20120268592A1 (en) * | 2010-12-13 | 2012-10-25 | Nike, Inc. | Processing Data of a User Performing an Athletic Activity to Estimate Energy Expenditure |
| US20120277891A1 (en) * | 2010-11-05 | 2012-11-01 | Nike, Inc. | Method and System for Automated Personal Training that Includes Training Programs |
| US20130095711A1 (en) * | 2011-10-18 | 2013-04-18 | Angelo Rubbo | Device for capturing, transmitting, and displaying individual rower data |
| WO2013084230A1 (en) * | 2011-12-05 | 2013-06-13 | Postelnik Eyal | Paddle link - real time paddling performance |
| US20140243163A1 (en) * | 2013-02-26 | 2014-08-28 | Robert Edmondson | Gravity return rowing exercise device |
| US8870726B2 (en) | 2010-11-10 | 2014-10-28 | Icon Ip, Inc. | System and method for exercising |
| US9223936B2 (en) | 2010-11-24 | 2015-12-29 | Nike, Inc. | Fatigue indices and uses thereof |
| WO2017008775A1 (en) | 2015-07-13 | 2017-01-19 | Augletics Gmbh | Method for processing training data in a rowing ergometer and rowing ergometer for carrying out the method |
| AU2015203745B2 (en) * | 2008-10-02 | 2017-03-30 | Yepp Australia Pty Ltd | Imaging system |
| US20170157445A1 (en) * | 2015-12-07 | 2017-06-08 | Calgym Group Holdings Pty. Ltd. | Fluid displacement stationary exercise equipment with continuously variable transmission |
| US9811639B2 (en) | 2011-11-07 | 2017-11-07 | Nike, Inc. | User interface and fitness meters for remote joint workout session |
| US9968822B2 (en) * | 2015-08-12 | 2018-05-15 | Kari A Hoover | Rush simulating rowing device |
| US9977874B2 (en) | 2011-11-07 | 2018-05-22 | Nike, Inc. | User interface for remote joint workout session |
| TWI626071B (en) * | 2017-02-03 | 2018-06-11 | 明躍國際健康科技股份有限公司 | Training device for rowing |
| US20180339195A1 (en) * | 2017-05-25 | 2018-11-29 | Erik A. Bernotas | Exercise Information System |
| US10188890B2 (en) | 2013-12-26 | 2019-01-29 | Icon Health & Fitness, Inc. | Magnetic resistance mechanism in a cable machine |
| US10188930B2 (en) | 2012-06-04 | 2019-01-29 | Nike, Inc. | Combinatory score having a fitness sub-score and an athleticism sub-score |
| US10212994B2 (en) | 2015-11-02 | 2019-02-26 | Icon Health & Fitness, Inc. | Smart watch band |
| US10252109B2 (en) | 2016-05-13 | 2019-04-09 | Icon Health & Fitness, Inc. | Weight platform treadmill |
| US10279212B2 (en) | 2013-03-14 | 2019-05-07 | Icon Health & Fitness, Inc. | Strength training apparatus with flywheel and related methods |
| US10293211B2 (en) | 2016-03-18 | 2019-05-21 | Icon Health & Fitness, Inc. | Coordinated weight selection |
| US20190151714A1 (en) * | 2005-02-02 | 2019-05-23 | Mad Dogg Athletics, Inc. | Programmed Exercise Bicycle with Computer Aided Guidance |
| US20190192899A1 (en) * | 2017-12-21 | 2019-06-27 | David P. Dubin | Proper rowing technique |
| US10420982B2 (en) | 2010-12-13 | 2019-09-24 | Nike, Inc. | Fitness training system with energy expenditure calculation that uses a form factor |
| US10426989B2 (en) | 2014-06-09 | 2019-10-01 | Icon Health & Fitness, Inc. | Cable system incorporated into a treadmill |
| US10441840B2 (en) | 2016-03-18 | 2019-10-15 | Icon Health & Fitness, Inc. | Collapsible strength exercise machine |
| US10449416B2 (en) | 2015-08-26 | 2019-10-22 | Icon Health & Fitness, Inc. | Strength exercise mechanisms |
| US10661114B2 (en) | 2016-11-01 | 2020-05-26 | Icon Health & Fitness, Inc. | Body weight lift mechanism on treadmill |
| US10940360B2 (en) | 2015-08-26 | 2021-03-09 | Icon Health & Fitness, Inc. | Strength exercise mechanisms |
| USD914812S1 (en) * | 2020-10-06 | 2021-03-30 | Total Gym Global Corp. | Adjustable rowing exercise device |
| USD923119S1 (en) * | 2019-10-04 | 2021-06-22 | Paradigm Health and Wellness | Rowing exercise machine |
| WO2021181055A1 (en) * | 2020-03-11 | 2021-09-16 | Weller Keith Stanley | Method and apparatus for measuring rowing skill |
| USD936160S1 (en) * | 2019-04-02 | 2021-11-16 | Life Fitness, Llc | Stationary rowing machine |
| CN113975717A (en) * | 2021-10-14 | 2022-01-28 | 杭州蓝堡电子商务集团有限公司 | Extended structure of rowing machine and rowing training system |
| CN114642867A (en) * | 2022-04-15 | 2022-06-21 | 胜兰科技(杭州)有限公司 | AI coach machine system with automatic error correction function of rowing motion gesture |
| USD974500S1 (en) | 2018-07-16 | 2023-01-03 | Hydrow, Inc. | Rowing machine |
| WO2023034052A1 (en) * | 2021-08-31 | 2023-03-09 | Oxefit, Inc. | Motorized paddling simulator |
| US11638856B1 (en) | 2022-05-26 | 2023-05-02 | Tonal Systems, Inc. | Exercise machine resistance identifier |
| US20230191190A1 (en) * | 2015-03-17 | 2023-06-22 | Lagree Technologies, Inc. | Exercise Machine Monitoring and Instruction System |
| WO2023201351A1 (en) * | 2022-04-14 | 2023-10-19 | Peloton Interactive, Inc. | User experience systems for a rowing machine |
| WO2023229601A1 (en) * | 2022-05-26 | 2023-11-30 | Tonal Systems, Inc. | Exercise machine resistance identifier |
| US20240082629A1 (en) * | 2018-05-16 | 2024-03-14 | Hydrow, Inc. | Rowing |
| USD1022078S1 (en) * | 2021-07-05 | 2024-04-09 | Mo Technologies Co., Ltd. | Rowing machine |
| US12036443B2 (en) | 2020-11-11 | 2024-07-16 | Total Gym Global Corp. | Exercise device system and method of using same |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2417084A (en) * | 2004-08-14 | 2006-02-15 | Prec Sport Ltd | Device for determining the position of a sliding seat |
| SI23792A (en) | 2011-07-04 | 2013-01-31 | Univerza V Ljubljani | System for training rowing technique |
| ES2396852B1 (en) * | 2011-09-08 | 2014-01-07 | Jesús GARCÍA PALLARES | TRAINING AND ASSESSMENT MACHINE OF THE SPECIFIC FORCE OF THE KAYAKIST WITH DYNAMIC MEASUREMENT SYSTEM. |
| CN109107137A (en) * | 2018-09-12 | 2019-01-01 | 广东小天才科技有限公司 | Sit-up counting method, sit-up counting device and sit-up counting equipment based on intelligent wearable equipment |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4832332A (en) * | 1987-02-24 | 1989-05-23 | Fichtel & Sachs Ag | Digital indicating instrument for a physical training device |
| US4984986A (en) * | 1989-11-07 | 1991-01-15 | Vohnout Vincent J | Apparatus and method for training oarsmen |
| US5645513A (en) * | 1992-11-02 | 1997-07-08 | Computer Athlete, Inc. | Exercising apparatus which interacts with a video game apparatus during exercise |
| US6682351B1 (en) * | 1998-10-12 | 2004-01-27 | Siemens Aktiengesellschaft | Method and system for monitoring the posture of a user at a training apparatus |
-
2004
- 2004-10-15 WO PCT/US2004/034054 patent/WO2005037379A2/en active Application Filing
- 2004-10-15 US US10/966,253 patent/US20050085348A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4832332A (en) * | 1987-02-24 | 1989-05-23 | Fichtel & Sachs Ag | Digital indicating instrument for a physical training device |
| US4984986A (en) * | 1989-11-07 | 1991-01-15 | Vohnout Vincent J | Apparatus and method for training oarsmen |
| US5645513A (en) * | 1992-11-02 | 1997-07-08 | Computer Athlete, Inc. | Exercising apparatus which interacts with a video game apparatus during exercise |
| US6682351B1 (en) * | 1998-10-12 | 2004-01-27 | Siemens Aktiengesellschaft | Method and system for monitoring the posture of a user at a training apparatus |
Cited By (95)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060166798A1 (en) * | 2004-01-05 | 2006-07-27 | Nelson Robert W | Abdominal exercise machine |
| US7232404B2 (en) * | 2004-01-05 | 2007-06-19 | Tristar Products, Inc. | Abdominal exercise machine |
| US7611445B2 (en) | 2004-01-05 | 2009-11-03 | Ab Coaster Holdings, Inc. | Abdominal exercise machine |
| US7207853B2 (en) * | 2004-01-29 | 2007-04-24 | Foresight Vision, Llc | Method and apparatus of information systems for rowers |
| WO2005072464A3 (en) * | 2004-01-29 | 2006-09-21 | Foresight Vision Llc | Method and apparatus of information systems for rowers |
| US20050170711A1 (en) * | 2004-01-29 | 2005-08-04 | Spencer Robert M. | Method and apparatus of information systems for rowers |
| WO2005072464A2 (en) * | 2004-01-29 | 2005-08-11 | Foresight Vision, Llc | Method and apparatus of information systems for rowers |
| US20050215870A1 (en) * | 2004-03-19 | 2005-09-29 | Rademaker William B | System for monitoring physical parameters of individuals performing physical activities and apparatus for indicating oar positions |
| US20070149370A1 (en) * | 2005-01-05 | 2007-06-28 | Wallace Brown | Abdominal exerciser device |
| US7455633B2 (en) | 2005-01-05 | 2008-11-25 | Ab Coaster Holdings, Llc | Abdominal exerciser device |
| US7485079B2 (en) | 2005-01-05 | 2009-02-03 | Ab Coaster Holdings, Inc. | Abdominal exercise machine |
| US11908564B2 (en) * | 2005-02-02 | 2024-02-20 | Mad Dogg Athletics, Inc. | Programmed exercise bicycle with computer aided guidance |
| US20190151714A1 (en) * | 2005-02-02 | 2019-05-23 | Mad Dogg Athletics, Inc. | Programmed Exercise Bicycle with Computer Aided Guidance |
| US20090156362A1 (en) * | 2005-04-05 | 2009-06-18 | Yoyo Technology Ab Regeringsgatan | Method and Tool for Exercising Muscles |
| US8162802B2 (en) * | 2005-04-05 | 2012-04-24 | Yoyo Technology Ab | Method and tool for exercising muscles |
| US7217164B2 (en) * | 2005-08-03 | 2007-05-15 | Andrew Liam Brendan Short | Visual sports training apparatus and method |
| US20070032143A1 (en) * | 2005-08-03 | 2007-02-08 | Short Andrew L B | Visual sports training apparatus and method |
| WO2010037176A1 (en) * | 2008-10-02 | 2010-04-08 | Yepp Australia Pty Ltd | Imaging system |
| CN102227668A (en) * | 2008-10-02 | 2011-10-26 | Yepp澳大利亚有限公司 | Imaging system |
| US9348119B2 (en) | 2008-10-02 | 2016-05-24 | Yepp Australia Pty Ltd. | Imaging systems |
| AU2015203745B2 (en) * | 2008-10-02 | 2017-03-30 | Yepp Australia Pty Ltd | Imaging system |
| US8192242B2 (en) | 2008-12-29 | 2012-06-05 | Luecker Michael C | Force sensing oar |
| US20100190615A1 (en) * | 2009-01-23 | 2010-07-29 | Accelerate Inc. | Energy absorbing suspension equipment for rowing and general exercise machines |
| US8192332B2 (en) * | 2009-01-23 | 2012-06-05 | Blackstone Automation, LLC | Energy absorbing suspension equipment (EASE) for rowing machines |
| US11710549B2 (en) | 2010-11-05 | 2023-07-25 | Nike, Inc. | User interface for remote joint workout session |
| US9358426B2 (en) * | 2010-11-05 | 2016-06-07 | Nike, Inc. | Method and system for automated personal training |
| US11094410B2 (en) | 2010-11-05 | 2021-08-17 | Nike, Inc. | Method and system for automated personal training |
| US10583328B2 (en) | 2010-11-05 | 2020-03-10 | Nike, Inc. | Method and system for automated personal training |
| US20120277891A1 (en) * | 2010-11-05 | 2012-11-01 | Nike, Inc. | Method and System for Automated Personal Training that Includes Training Programs |
| US20120183939A1 (en) * | 2010-11-05 | 2012-07-19 | Nike, Inc. | Method and system for automated personal training |
| US9919186B2 (en) | 2010-11-05 | 2018-03-20 | Nike, Inc. | Method and system for automated personal training |
| US20120183940A1 (en) * | 2010-11-05 | 2012-07-19 | Nike, Inc. | Method and system for automated personal training |
| US11915814B2 (en) | 2010-11-05 | 2024-02-27 | Nike, Inc. | Method and system for automated personal training |
| US9283429B2 (en) * | 2010-11-05 | 2016-03-15 | Nike, Inc. | Method and system for automated personal training |
| US9457256B2 (en) * | 2010-11-05 | 2016-10-04 | Nike, Inc. | Method and system for automated personal training that includes training programs |
| US8870726B2 (en) | 2010-11-10 | 2014-10-28 | Icon Ip, Inc. | System and method for exercising |
| US9223936B2 (en) | 2010-11-24 | 2015-12-29 | Nike, Inc. | Fatigue indices and uses thereof |
| USD660383S1 (en) | 2010-12-03 | 2012-05-22 | Icon Ip, Inc. | Dual curved support for an exercise device |
| US9852271B2 (en) * | 2010-12-13 | 2017-12-26 | Nike, Inc. | Processing data of a user performing an athletic activity to estimate energy expenditure |
| US10420982B2 (en) | 2010-12-13 | 2019-09-24 | Nike, Inc. | Fitness training system with energy expenditure calculation that uses a form factor |
| US20120268592A1 (en) * | 2010-12-13 | 2012-10-25 | Nike, Inc. | Processing Data of a User Performing an Athletic Activity to Estimate Energy Expenditure |
| US8968041B2 (en) * | 2011-10-18 | 2015-03-03 | Angelo Rubbo | Device for capturing, transmitting, and displaying individual rower data |
| US20130095711A1 (en) * | 2011-10-18 | 2013-04-18 | Angelo Rubbo | Device for capturing, transmitting, and displaying individual rower data |
| US10825561B2 (en) | 2011-11-07 | 2020-11-03 | Nike, Inc. | User interface for remote joint workout session |
| US9811639B2 (en) | 2011-11-07 | 2017-11-07 | Nike, Inc. | User interface and fitness meters for remote joint workout session |
| US9977874B2 (en) | 2011-11-07 | 2018-05-22 | Nike, Inc. | User interface for remote joint workout session |
| US10252134B2 (en) * | 2011-12-05 | 2019-04-09 | Eyal Postelnik | Paddle link—real time paddling performance |
| EP2788093A4 (en) * | 2011-12-05 | 2015-08-19 | Eyal Postelnik | Paddle link - real time paddling performance |
| US20150032410A1 (en) * | 2011-12-05 | 2015-01-29 | Eyal Postelnik | Paddle link - real time paddling performance |
| WO2013084230A1 (en) * | 2011-12-05 | 2013-06-13 | Postelnik Eyal | Paddle link - real time paddling performance |
| US10188930B2 (en) | 2012-06-04 | 2019-01-29 | Nike, Inc. | Combinatory score having a fitness sub-score and an athleticism sub-score |
| US9878200B2 (en) * | 2013-02-26 | 2018-01-30 | Robert Edmondson | Gravity return rowing exercise device |
| US20140243163A1 (en) * | 2013-02-26 | 2014-08-28 | Robert Edmondson | Gravity return rowing exercise device |
| US10279212B2 (en) | 2013-03-14 | 2019-05-07 | Icon Health & Fitness, Inc. | Strength training apparatus with flywheel and related methods |
| US10188890B2 (en) | 2013-12-26 | 2019-01-29 | Icon Health & Fitness, Inc. | Magnetic resistance mechanism in a cable machine |
| US10426989B2 (en) | 2014-06-09 | 2019-10-01 | Icon Health & Fitness, Inc. | Cable system incorporated into a treadmill |
| US20230191190A1 (en) * | 2015-03-17 | 2023-06-22 | Lagree Technologies, Inc. | Exercise Machine Monitoring and Instruction System |
| US11794068B2 (en) * | 2015-03-17 | 2023-10-24 | Lagree Technologies, Inc. | Exercise machine monitoring and instruction system |
| WO2017008775A1 (en) | 2015-07-13 | 2017-01-19 | Augletics Gmbh | Method for processing training data in a rowing ergometer and rowing ergometer for carrying out the method |
| US9968822B2 (en) * | 2015-08-12 | 2018-05-15 | Kari A Hoover | Rush simulating rowing device |
| US10449416B2 (en) | 2015-08-26 | 2019-10-22 | Icon Health & Fitness, Inc. | Strength exercise mechanisms |
| US10940360B2 (en) | 2015-08-26 | 2021-03-09 | Icon Health & Fitness, Inc. | Strength exercise mechanisms |
| US10212994B2 (en) | 2015-11-02 | 2019-02-26 | Icon Health & Fitness, Inc. | Smart watch band |
| US9878194B2 (en) * | 2015-12-07 | 2018-01-30 | Calgym Group Holdings Pty. Ltd. | Fluid displacement stationary exercise equipment with continuously variable transmission |
| US20170157445A1 (en) * | 2015-12-07 | 2017-06-08 | Calgym Group Holdings Pty. Ltd. | Fluid displacement stationary exercise equipment with continuously variable transmission |
| US10293211B2 (en) | 2016-03-18 | 2019-05-21 | Icon Health & Fitness, Inc. | Coordinated weight selection |
| US10441840B2 (en) | 2016-03-18 | 2019-10-15 | Icon Health & Fitness, Inc. | Collapsible strength exercise machine |
| US10252109B2 (en) | 2016-05-13 | 2019-04-09 | Icon Health & Fitness, Inc. | Weight platform treadmill |
| US10661114B2 (en) | 2016-11-01 | 2020-05-26 | Icon Health & Fitness, Inc. | Body weight lift mechanism on treadmill |
| TWI626071B (en) * | 2017-02-03 | 2018-06-11 | 明躍國際健康科技股份有限公司 | Training device for rowing |
| US20180339195A1 (en) * | 2017-05-25 | 2018-11-29 | Erik A. Bernotas | Exercise Information System |
| US20190192899A1 (en) * | 2017-12-21 | 2019-06-27 | David P. Dubin | Proper rowing technique |
| US10682546B2 (en) * | 2017-12-21 | 2020-06-16 | David P. Dubin | Proper rowing technique |
| US20240082629A1 (en) * | 2018-05-16 | 2024-03-14 | Hydrow, Inc. | Rowing |
| USD974500S1 (en) | 2018-07-16 | 2023-01-03 | Hydrow, Inc. | Rowing machine |
| USD974499S1 (en) | 2018-07-16 | 2023-01-03 | Hydrow, Inc. | Rowing machine |
| USD975214S1 (en) | 2018-07-16 | 2023-01-10 | Hydrow, Inc. | Rowing machine |
| USD979670S1 (en) * | 2018-07-16 | 2023-02-28 | Hydrow, Inc. | Rowing machine |
| USD981511S1 (en) * | 2018-07-16 | 2023-03-21 | Hydrow, Inc. | Rowing machine |
| USD984562S1 (en) | 2018-07-16 | 2023-04-25 | Hydrow, Inc. | Rowing machine |
| USD936160S1 (en) * | 2019-04-02 | 2021-11-16 | Life Fitness, Llc | Stationary rowing machine |
| USD923119S1 (en) * | 2019-10-04 | 2021-06-22 | Paradigm Health and Wellness | Rowing exercise machine |
| WO2021181055A1 (en) * | 2020-03-11 | 2021-09-16 | Weller Keith Stanley | Method and apparatus for measuring rowing skill |
| AU2021235230B2 (en) * | 2020-03-11 | 2024-03-14 | Keith Stanley WELLER | Method and apparatus for measuring rowing skill |
| USD914812S1 (en) * | 2020-10-06 | 2021-03-30 | Total Gym Global Corp. | Adjustable rowing exercise device |
| EP4243944A4 (en) * | 2020-11-11 | 2024-10-02 | Total Gym Global Corp | Exercise device system and method of using same |
| US12036443B2 (en) | 2020-11-11 | 2024-07-16 | Total Gym Global Corp. | Exercise device system and method of using same |
| USD1022078S1 (en) * | 2021-07-05 | 2024-04-09 | Mo Technologies Co., Ltd. | Rowing machine |
| WO2023034052A1 (en) * | 2021-08-31 | 2023-03-09 | Oxefit, Inc. | Motorized paddling simulator |
| CN113975717A (en) * | 2021-10-14 | 2022-01-28 | 杭州蓝堡电子商务集团有限公司 | Extended structure of rowing machine and rowing training system |
| WO2023201351A1 (en) * | 2022-04-14 | 2023-10-19 | Peloton Interactive, Inc. | User experience systems for a rowing machine |
| CN114642867A (en) * | 2022-04-15 | 2022-06-21 | 胜兰科技(杭州)有限公司 | AI coach machine system with automatic error correction function of rowing motion gesture |
| WO2023229601A1 (en) * | 2022-05-26 | 2023-11-30 | Tonal Systems, Inc. | Exercise machine resistance identifier |
| US11638856B1 (en) | 2022-05-26 | 2023-05-02 | Tonal Systems, Inc. | Exercise machine resistance identifier |
| US12102876B2 (en) | 2022-05-26 | 2024-10-01 | Tonal Systems, Inc. | Exercise machine resistance identifier |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2005037379A2 (en) | 2005-04-28 |
| WO2005037379A3 (en) | 2005-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20050085348A1 (en) | Apparatus for the improvement of rowing technique | |
| US7207853B2 (en) | Method and apparatus of information systems for rowers | |
| AU2004201603B2 (en) | Golf swing diagnosis system | |
| EP2383021B1 (en) | Apparatus for the assisted performance of a fitness exercise | |
| US8968041B2 (en) | Device for capturing, transmitting, and displaying individual rower data | |
| US20090211395A1 (en) | Adjustable pedal system for exercise bike | |
| US7976433B2 (en) | Biomechanical diagnostic machine for bicycle fitting, rehabilitation and training | |
| US20090181832A1 (en) | Rowing trainer | |
| EP1410984A1 (en) | Device and method for determining the customized dimensions of a bicycle frame | |
| CN109011361A (en) | A kind of reinforcement plate of adaptive stepless adjustable pedal angle | |
| JP5624488B2 (en) | Motor function measurement system | |
| CN108760274A (en) | A kind of intelligence wearing slide fastener durability detection device | |
| US5820528A (en) | Paddling adapter attachment apparatus for rowing machines | |
| US4928398A (en) | Anthropometer | |
| CN110141830B (en) | Outdoor fitness equipment with intelligent action recognition function | |
| CN211245382U (en) | Multifunctional ligament stretcher | |
| CN108888899B (en) | A kind of body-building recreation rowing machine | |
| EP2023816B1 (en) | Balance monitor | |
| CN109247930B (en) | System comprising step tester and use method | |
| CN212308839U (en) | Golf trunk rotation angle measuring device | |
| CN214231345U (en) | Be applied to VR rehabilitation training's device | |
| CN217660689U (en) | Chest compression detection system | |
| CN110393906B (en) | Auxiliary instrument for training and correcting Chinese shooting skill actions | |
| CN108962374B (en) | Method for testing and training using integrated physical examination system | |
| US20210008414A1 (en) | A method and system for measuring a rowing profile |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STCB | Information on status: application discontinuation |
Free format text: ABANDONED -- FAILURE TO RESPOND TO AN OFFICE ACTION |