KR20210035387A - Pelvic posture tracking device - Google Patents
Pelvic posture tracking device Download PDFInfo
- Publication number
- KR20210035387A KR20210035387A KR1020190117030A KR20190117030A KR20210035387A KR 20210035387 A KR20210035387 A KR 20210035387A KR 1020190117030 A KR1020190117030 A KR 1020190117030A KR 20190117030 A KR20190117030 A KR 20190117030A KR 20210035387 A KR20210035387 A KR 20210035387A
- Authority
- KR
- South Korea
- Prior art keywords
- unit
- housing
- sensor
- posture tracking
- tracking device
- Prior art date
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor
- A61F2/4657—Measuring instruments used for implanting artificial joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1071—Measuring physical dimensions, e.g. size of the entire body or parts thereof measuring angles, e.g. using goniometers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1116—Determining posture transitions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6867—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive specially adapted to be attached or implanted in a specific body part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor
- A61F2/4603—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4607—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor for insertion or extraction of endoprosthetic joints or of accessories thereof of hip femoral endoprostheses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor
- A61F2/4603—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/4609—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor for insertion or extraction of endoprosthetic joints or of accessories thereof of acetabular cups
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/0096—Material properties self cleaning, e.g. having lotus effect
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools or methods for implanting or extracting artificial joints, accessories, bone grafts or substitutes, or particular adaptations therefor
- A61F2/4657—Measuring instruments used for implanting artificial joints
- A61F2002/4668—Measuring instruments used for implanting artificial joints for measuring angles
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Surgery (AREA)
- Transplantation (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Physical Education & Sports Medicine (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Dentistry (AREA)
- Physiology (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
Abstract
Description
본 발명은 골반 자세 추적 장치에 관한 것으로, 보다 상세하게는 고관절의 수술시 골반의 기울기 등을 측정하여 비구컵의 거치를 용이하게 할 수 있는 골반 자세 추적 장치에 관한 것이다. The present invention relates to a pelvic posture tracking device, and more particularly, to a pelvic posture tracking device capable of facilitating mounting of an acetabular cup by measuring the inclination of the pelvis during surgery of the hip joint.
인공 고관절 전치환술시에 골반의 3차원적 위치를 중요한 요소이다. 수술 과정에서 수술자는 다양한 지표를 기준으로 삽입물(인공관절 또는 뼈 고정용 핀 등)의 삽입 각도를 가늠한다. 그러나 골반주위에 두꺼운 근육과 지방 등 연부조직이 둘러싸여 있고 변연부가 부드럽고 골 구조물이 복잡하게 생겨 큰 각도변화에도 그 위치 변화를 인지하기 어렵다. 또한 실제 수술시는 감염예방을 위해 소독된 부위만 노출되고 여러겹의 방포로 환자를 가리고 있어 환자의 골반 위치를 알기 어렵다. 게다가 수술시 하지의 조작을 통해 골반의 움직임이 발생하여 수술자가 원하는 각도로 인공고관절 치환물을 삽입하는데 여러 어려움이 있다. 따라서 이를 개선할 필요성이 요청된다.The three-dimensional position of the pelvis is an important factor in total hip arthroplasty. During the surgery, the operator measures the angle of insertion of the implant (artificial joint or bone fixing pin, etc.) based on various indicators. However, soft tissues such as thick muscles and fat are surrounded around the pelvis, and the edges are soft and the bone structure is complicated, making it difficult to recognize the change in position even with a large angle change. In addition, during the actual operation, only the disinfected area is exposed to prevent infection and the patient is covered with multiple layers of airbags. In addition, there are several difficulties in inserting an artificial hip joint replacement at an angle desired by the operator because the pelvis moves through manipulation of the lower limbs during surgery. Therefore, there is a need to improve this.
본 발명의 배경기술은 대한민국 등록특허공보 제10-0563249호(2006.03.15 등록, 발명의 명칭: 인공고관절 수술용 비구컵 방향 안내장치)에 개시되어 있다. The background technology of the present invention is disclosed in Korean Patent Publication No. 10-0563249 (registered on March 15, 2006, title of the invention: acetabular cup direction guide device for artificial hip surgery).
본 발명은 상기와 같은 문제점을 해결하기 위해 창출된 것으로, 본 발명의 목적은 고관절 수술시 골반의 기울기 등을 측정하여 비구컵의 거치를 용이하게 할 수 있는 골반 자세 추적 장치를 제공하는 것이다. The present invention was created to solve the above problems, and an object of the present invention is to provide a pelvic posture tracking device capable of facilitating mounting of an acetabular cup by measuring the tilt of the pelvis during hip surgery.
본 발명의 일 실시예에 따른 골반 자세 추적 장치는: 하우징; 상기 하우징의 내부에 장착되는 모터부; 상기 하우징 내부에 이동 가능하게 장착되고, 골반의 기울기를 측정하는 센서부; 및 상기 하우징 내부에 수용되고, 상기 모터부에 의해 작동되며, 상기 센서부를 상기 하우징 내부에서 이동시키는 이동부를 포함하고, 상기 이동부는, 상기 하우징의 일측에 배치되고, 상기 모터부와 연결되어 상기 모터부의 작동에 따라 작동되는 구동부; 상기 하우징의 타측에 상기 구동부와 이격되게 배치되고, 상기 구동부에 의해 작동되는 종동부; 및 상기 구동부의 동력을 상기 종동부로 전달하고, 상기 센서부가 안착되며, 상기 센서부를 이동시키는 전달부를 포함한다.A pelvic posture tracking device according to an embodiment of the present invention includes: a housing; A motor unit mounted inside the housing; A sensor unit movably mounted inside the housing and measuring a tilt of the pelvis; And a moving part accommodated in the housing, operated by the motor part, and moving the sensor part inside the housing, and the moving part is disposed on one side of the housing and connected to the motor part A driving unit that is operated according to the operation of the unit; A driven part disposed on the other side of the housing to be spaced apart from the driving part and operated by the driving part; And a transmission unit that transmits the power of the driving unit to the driven unit, the sensor unit is seated, and moves the sensor unit.
본 발명에서 상기 이동부는, 상기 하우징의 일측에 배치되고, 상기 모터부와 연결되어 상기 모터부의 작동에 따라 작동되는 구동부; 상기 하우징의 타측에 상기 구동부와 이격되게 배치되고, 상기 구동부에 의해 작동되는 종동부; 및 상기 구동부의 동력을 상기 종동부로 전달하고, 상기 센서부가 안착되어 상기 센서부를 이동시키는 전달부를 포함한다.In the present invention, the moving part may include a driving part disposed on one side of the housing, connected to the motor part, and operated according to the operation of the motor part; A driven part disposed on the other side of the housing to be spaced apart from the driving part and operated by the driving part; And a transmission unit that transmits the power of the driving unit to the driven unit, and moves the sensor unit while the sensor unit is seated.
본 발명에서 상기 구동부는, 상기 하우징에 고정되는 제1기둥부; 상기 모터부에 의해 회전되는 제1기어부; 상기 제1기둥부에 회전 가능하게 장착되고, 상기 제1기어부에 치합되어 회전되는 제2기어부; 및 상기 제1기둥부에 회전 가능하게 장착되고, 상기 제2기어부에 고정되며, 외측면에 상기 전달부가 감기는 제1롤러부를 포함한다.In the present invention, the driving unit includes: a first pillar portion fixed to the housing; A first gear unit rotated by the motor unit; A second gear portion rotatably mounted on the first pillar portion and engaged with the first gear portion to rotate; And a first roller part rotatably mounted on the first column part, fixed to the second gear part, and wound on an outer surface of the transmission part.
본 발명에서 상기 종동부는, 상기 제1기둥부와 이격 배치되고, 상기 하우징에 고정되는 제2기둥부; 및 상기 제2기둥부에 회전 가능하게 장착되고, 외측면에 상기 전달부가 감기며, 상기 전달부를 통해 전달되는 상기 제1롤러부의 회전에 따라 회전되는 제2롤러부를 포함한다.In the present invention, the driven portion may include a second pillar portion disposed to be spaced apart from the first pillar portion and fixed to the housing; And a second roller part rotatably mounted on the second pillar, the transfer part wound around an outer surface, and rotated according to the rotation of the first roller part transmitted through the transfer part.
본 발명에서 상기 센서부는, 상기 전달부에 안착되는 센서하우징; 상기 센서하우징에 장착되고, 상기 골반의 기울기를 측정하는 측정부; 및 상기 센서하우징에 장착되고, 상기 측정부에서 측정되는 정보를 송신하는 송신부를 포함한다.In the present invention, the sensor unit includes: a sensor housing mounted on the transmission unit; A measuring unit mounted on the sensor housing and measuring an inclination of the pelvis; And a transmission unit mounted on the sensor housing and transmitting information measured by the measurement unit.
본 발명에서 상기 전달부는 상기 구동부와 상기 종동부를 감싸는 타원형의 밴드 형상으로 이루어지고, 상기 센서하우징은 상기 전달부의 일측에 안착되는 제1수용홈부와 상기 전달부의 타측에 안착되는 제2수용홈부를 구비하고, 상기 제1수용홈부는 상기 전달부의 일측에 고정되고, 상기 제2수용홈부는 상기 전달부의 타측에 이동 가능하게 안착된다.In the present invention, the transmission part is formed in an elliptical band shape surrounding the driving part and the driven part, and the sensor housing includes a first receiving groove seated on one side of the delivery part and a second receiving groove seated on the other side of the delivery part. And, the first receiving groove is fixed to one side of the delivery unit, and the second receiving groove is movably seated on the other side of the delivery unit.
본 발명에서 상기 하우징는 원통형으로 형성되고, 상기 하우징의 모서리부는 곡형으로 형성된다.In the present invention, the housing is formed in a cylindrical shape, and the corner portion of the housing is formed in a curved shape.
본 발명에서 상기 하우징은 방수, 방오 처리되어 이루어진다.In the present invention, the housing is made of waterproof and antifouling treatment.
본 발명의 다른 실시예에 따른 골반 자세 추적 장치는: 하우징; 상기 하우징의 양측에 각각 장착되고, 직장에 착탈 가능한 제1고정부와 제2고정부; 상기 제1고정부에 장착되고, 상기 제2고정부에 연결되며 상기 제2고정부를 상기 하우징의 길이방향을 따라 이동시키는 이동부; 및 상기 이동부에 장착되고, 골반의 기울기를 측정하는 센서부를 포함한다.A pelvic posture tracking device according to another embodiment of the present invention includes: a housing; A first fixing part and a second fixing part respectively mounted on both sides of the housing and detachable from the workplace; A moving part mounted on the first fixing part, connected to the second fixing part, and moving the second fixing part along the longitudinal direction of the housing; And a sensor unit mounted on the moving unit and measuring a tilt of the pelvis.
본 발명에서 상기 제1고정부는, 상기 하우징의 일측에 장착되는 제1고정하우징; 상기 제1고정하우징에 복수개가 장착되고, 유체의 공급 여부에 따라 상기 직장 측으로 팽창되는 제1팽창부; 및 상기 제1팽창부에 유체를 공급하는 제1유체공급부를 포함한다.In the present invention, the first fixing part may include a first fixing housing mounted on one side of the housing; A first expansion unit that is mounted on the first fixed housing and expands toward the workplace according to whether a fluid is supplied or not; And a first fluid supply unit supplying a fluid to the first expansion unit.
본 발명에서 상기 제2고정부는, 상기 하우징의 타측에 장착되는 제2고정하우징; 상기 제2고정하우징에 복수개가 장착되고, 유체의 공급 여부에 따라 상기 직장 측으로 팽창되는 제2팽창부; 및 상기 제2팽창부에 유체를 공급하는 제2유체공급부를 포함한다.In the present invention, the second fixing part may include a second fixing housing mounted on the other side of the housing; A second expansion unit that is mounted on the second fixed housing and expands toward the workplace according to whether or not a fluid is supplied; And a second fluid supply unit supplying a fluid to the second expansion unit.
본 발명에서 상기 이동부는, 상기 제1고정하우징의 내부에 장착되는 모터부; 및 일측이 상기 모터부에 연결되고, 타측이 상기 제2고정하우징에 연결되고, 외측면에 상기 센서부가 장착되며, 상기 모터부의 구동에 따라 권취 또는 권출되면서 상기 제2고정하우징을 이동시키는 와이어를 포함한다.In the present invention, the moving part may include a motor part mounted inside the first fixed housing; And one side is connected to the motor unit, the other side is connected to the second fixed housing, the sensor unit is mounted on the outer surface, and a wire for moving the second fixed housing while being wound or unwound according to the driving of the motor unit. Includes.
본 발명에서 상기 센서부는, 상기 와이어에 장착되는 센서하우징; 상기 센서하우징에 장착되고, 상기 골반의 기울기를 측정하는 측정부; 및 상기 센서하우징에 장착되고, 상기 측정부에서 측정되는 정보를 송신하는 송신부를 포함한다.In the present invention, the sensor unit may include a sensor housing mounted on the wire; A measuring unit mounted on the sensor housing and measuring an inclination of the pelvis; And a transmission unit mounted on the sensor housing and transmitting information measured by the measurement unit.
본 발명에서 상기 하우징은 상기 하우징의 길이방향을 따라 신축 가능한 주룸관 형상으로 형성된다.In the present invention, the housing is formed in the shape of a main room tube that can be expanded and contracted along the longitudinal direction of the housing.
본 발명에서 상기 하우징, 상기 제1고정부, 상기 제2고정부는 방수, 방오 처리되어 이루어진다.In the present invention, the housing, the first fixing part, and the second fixing part are made by waterproof and antifouling treatment.
본 발명에 따른 골반 자세 추적 장치에 의하면, 골반의 기울기 등을 센서부에 의해 실시간으로 측정하고, 수술자에서 그 정보가 전달되어 비구컵의 거치가 용이하게 이루어질 수 있다. According to the pelvic posture tracking apparatus according to the present invention, the tilt of the pelvis is measured in real time by a sensor unit, and the information is transmitted from the operator, so that the acetabular cup can be easily mounted.
또한 본 발명에 따르면 센서부를 이동시켜 골반의 기울기 등을 측정할 수 있으므로, 제품의 단가를 낮추어 수술비 등을 절감할 수 있다. In addition, according to the present invention, since the sensor unit can be moved to measure the inclination of the pelvis, it is possible to reduce the cost of the product and reduce the operating cost.
도 1은 본 발명에 따른 골반 자세 추적 장치가 골반에 장착된 것을 개략적으로 나타내는 사시도이다.
도 2는 본 발명에 따른 골반 자세 추적 장치가 골반에 장착된 것을 개략적으로 나타내는 평년도이다.
도 3은 본 발명의 일 실시예에 따른 골반 자세 추적 장치를 개략적으로 나타내는 사시도이다.
도 4는 본 발명의 일 실시예에 따른 골반 자세 추적 장치를 개략적으로 나타내는 단면도이다.
도 5는 본 발명의 일 실시예에 따른 골반 자세 추적 장치에서 센서하우징과 전달부의 결합관계를 개략적으로 나타내는 단면도이다.
도 6은 본 발명의 일 실시예에 따른 골반 자세 추적 장치의 작동의 개략적으로 나타내는 사시도이다.
도 7은 본 발명의 다른 실시예에 따른 골반 자세 추적 장치를 개략적으로 나타내는 사시도이다.
도 8은 본 발명의 다른 실시예에 따른 골반 자세 추적 장치를 개략적으로 나타내는 단면도이다.
도 9는 본 발명의 다른 실시예에 따른 골반 자세 추적 장치에서 제1고정부와 제2고정부의 작동을 개략적으로 나타내는 작동도이다.
도 10은 본 발명의 다른 실시예에 따른 골반 자세 추적 장치에서 제1고정부가 모터부의 작동에 따라 이동되는 것을 개략적으로 나타내는 작동도이다.
도 11은 본 발명의 다른 실시예에 따른 골반 자세 추적 장치에서 제1고정부와 제2고정부의 작동을 개략적으로 나타내는 작동도이다.
도 12는 본 발명의 다른 실시예에 따른 골반 자세 추적 장치에서 제2고정부가 탄성부의 작동에 따라 이동되는 것을 개략적으로 나타내는 작동도이다. 1 is a perspective view schematically showing that the pelvic posture tracking device according to the present invention is mounted on the pelvis.
2 is a general year schematically showing that the pelvic posture tracking device according to the present invention is mounted on the pelvis.
3 is a perspective view schematically showing a pelvic posture tracking apparatus according to an embodiment of the present invention.
4 is a schematic cross-sectional view of a pelvic posture tracking apparatus according to an embodiment of the present invention.
5 is a cross-sectional view schematically showing a coupling relationship between a sensor housing and a delivery unit in the pelvic posture tracking apparatus according to an embodiment of the present invention.
6 is a perspective view schematically showing the operation of the pelvic posture tracking apparatus according to an embodiment of the present invention.
7 is a perspective view schematically showing a pelvic posture tracking apparatus according to another embodiment of the present invention.
8 is a cross-sectional view schematically showing a pelvic posture tracking apparatus according to another embodiment of the present invention.
9 is an operation diagram schematically showing the operation of the first fixing portion and the second fixing portion in the pelvic posture tracking apparatus according to another embodiment of the present invention.
10 is an operation diagram schematically showing that the first fixing part is moved according to the operation of the motor unit in the pelvic posture tracking apparatus according to another embodiment of the present invention.
11 is an operation diagram schematically showing the operation of the first fixing portion and the second fixing portion in the pelvic posture tracking apparatus according to another embodiment of the present invention.
12 is an operation diagram schematically showing that the second fixing part is moved according to the operation of the elastic part in the pelvic posture tracking apparatus according to another embodiment of the present invention.
이하, 첨부된 도면들을 참조하여 본 발명에 따른 골반 자세 추적 장치의 일 실시예를 설명한다. 이러한 과정에서 도면에 도시된 선들의 두께나 구성요소의 크기 등은 설명의 명료성과 편의상 과장되게 도시되어 있을 수 있다. Hereinafter, an embodiment of a pelvic posture tracking apparatus according to the present invention will be described with reference to the accompanying drawings. In this process, the thickness of the lines or the size of components shown in the drawings may be exaggerated for clarity and convenience of description.
또한, 후술되는 용어들은 본 발명에서의 기능을 고려하여 정의된 용어들로써, 이는 사용자, 운용자의 의도 또는 관례에 따라 달라질 수 있다. 그러므로 이러한 용어들에 대한 정의는 본 명세서 전반에 걸친 내용을 토대로 내려져야 할 것이다.In addition, terms to be described later are terms defined in consideration of functions in the present invention, which may vary according to the intention or custom of users or operators. Therefore, definitions of these terms should be made based on the contents throughout the present specification.
본 발명의 일 실시예에 따른 골반 자세 추적 장치(1)를 설명한다. 도 1은 본 발명에 따른 골반 자세 추적 장치가 골반에 장착된 것을 개략적으로 나타내는 사시도이고, 도 2는 본 발명에 따른 골반 자세 추적 장치가 골반에 장착된 것을 개략적으로 나타내는 평년도이고, 도 3은 본 발명의 일 실시예에 따른 골반 자세 추적 장치를 개략적으로 나타내는 사시도이고, 도 4는 본 발명의 일 실시예에 따른 골반 자세 추적 장치를 개략적으로 나타내는 단면도이고, 도 5는 본 발명의 일 실시예에 따른 골반 자세 추적 장치에서 센서하우징과 전달부의 결합관계를 개략적으로 나타내는 단면도이고, 도 6은 본 발명의 일 실시예에 따른 골반 자세 추적 장치의 작동의 개략적으로 나타내는 사시도이다. A pelvic
도 1 내지 도 6을 참조하면, 본 발명의 일 실시예에 따른 골반 자세 추적 장치(1)는 하우징(100), 모터부(200), 이동부(300), 센서부(400)를 포함한다. 본 발명에 따른 골반 자세 추적 장치(1)는 고관절 수술시 골반의 기울기 등을 측정하여 수술자가 골반의 자세를 실시간으로 확인할 수 있도록 수술을 보조하는 장치이다.1 to 6, the pelvic
하우징(100)은 항문을 통해 인체 내부의 직장(rectum)에 삽입된다. 하우징(100)은 원통형으로 형성된다. 하우징(100)의 모서리부(110)는 곡형으로 형성되어, 인체 내부 삽입시 인체 내부 손상 발생을 방지할 수 있다.The
본 발명에서 하우징(100)은 방수(waterproofing), 방오(antifouling) 처리되어 이루어진다. 또한 하우징(100)은 소독 처리가 가능한 소재로 감싸여 진다. 하우징(100)은 방수, 방오 처리되어, 수술시 인체 내부 위생상의 문제가 없도록 한다. In the present invention, the
하우징(100)의 일단부(도 4 기준 하단부)에는 전원공급부(500)가 장착된다. 전원공급부(500)는 하우징(100)을 통해 모터부(200)와 연결되어, 모터부(200)에 전원을 공급한다. 본 발명에서 모터부(200)는 전원공급부(500)를 통해 전원을 공급받거나, 내장 배터리를 통해 전원을 공급받을 수 있다. 또한 전원공급부(500)는 센서부(400)에서 측정된 정보를 외부의 전자기기로 전달하는 용도로 사용될 수 있다. 여기서 전자기기는 센서부(400)에서 측정된 정보를 수술자에서 표시할 수 있는 외부 출력기구인 모니터 등을 구비한 전자기기를 의미한다.A
모터부(200)는 하우징(100)이 일측(도 3 기준 좌측)에 장착되는 것으로, 이동부(300)의 구동부(310)에 동력을 제공한다. 모터부(200)는 전원공급부(500)를 통해 외부로부터 전원을 공급받거나, 내장 배터리에 의해 작동된다. The
이동부(300)는 하우징(100)의 내부에 수용되고, 모터부(200)에 의해 작동되는 것으로, 센서부(400)를 하우징(100)의 내부에서 상기 하우징(100)의 길이방향(도 4 기준 좌우방향)을 따라 이동시킨다. The moving
이동부(300)는 구동부(310), 종동부(320), 전달부(330)를 포함한다. 구동부(310)는 하우징(100)의 일측(도 3 기준 좌측)에 배치되고, 모터부(200)와 연결되어 모터부(200)의 작동에 따라 작동된다. 구동부(310)는 제1기둥부(311), 제1기어부(313), 제2기어부(315), 제1롤러부(317)를 포함한다. The moving
제1기둥부(311)는 하우징(100)의 내부에 고정되는 것으로, 하우징(100)의 길이방향에 대해 직교되게 하우징(100)의 내측면에 고정된다. 제1기둥부(311)에 제2기어부(315)와 제1롤러부(317)가 회전 가능하게 장착된다. The
제1기어부(313)는 모터부(200)에 의해 회전된다. 제2기어부(315)는 제1기둥부(311)에 회전 가능하게 장착되고, 제1기어부(313)에 치합되어 회전된다. 본 발명에서 제1기어부(313)와 제2기어부(315)는 베벨 기어(bevel gear)로 이루어진다. The
제1롤러부(317)는 제1기둥부(311)에 회전 가능하게 장착되고, 제2기어부(315)에 고정되며, 외측면에 전달부(330)가 감긴다. 제1롤러부(317)는 제2기어부(315)의 일면(도 4 기준 하측면)에 본딩 또는 볼팅에 의해 고정되어 제2기어부(315)의 회전에 따라 일체로 회전된다. 제1롤러부(317)의 외측면에는 전달부(330)가 감기고, 이탈되지 않도록 홈부가 형성된다.The
종동부(320)는 하우징(100)의 타측(도 3 기준 우측)에 구동부(310)와 이격되게 배치되고, 구동부(310)에 의해 작동된다. 즉 종동부(320)는 구동부(310)의 동력이 전달부(330)를 통해 전달되어 작동된다. 종동부(320)는 제2기둥부(321)과 제2롤러부(323)를 포함하다. The driven
제2기둥부(321)는 제1기둥부(311)와 이격 배치되고, 하우징(100)에 고정된다. 제2기둥부(321)는 하우징(100)의 길이방향에 대해 직교되게 하우징(100)의 내측면에 고정된다. 제2기둥부(321)에 제2롤러부(323)가 회전 가능하게 장착된다. The
제2롤러부(323)는 제2기둥부(321)에 회전 가능하게 장착되고, 외측면에 전달부(330)가 감기며, 전달부(330)를 통해 전달되는 상기 제1롤러부(317)의 회전에 따라 회전된다. 제2롤러부(323)의 외측면에는 전달부(330)가 감기고, 이탈되지 않도록 홈부가 형성된다.The
전달부(330)는 구동부(310)의 제1롤러부(317)과 종동부(320)의 제2롤러부(323)에 감기는 것으로, 구동부(310)의 동력을 종동부(320)로 전달한다. 전달부(330)는 센서부(400)가 안착되어 센서부(400)를 하우징(100)의 길이방향을 따라 이동시킨다. 본 발명에서 전달부(330)는 타원형의 밴드 형상으로 형성된다. The
센서부(400)는 하우징(100)의 내부에 이동 가능하게 장착되고, 이동부(300)에 의해 하우징(100) 내부에서 이동되면서 골반(10)의 기울기를 측정한다. 센서부(400)는 하우징(100) 내부에서 이동 가능하게 이동부(300)의 전달부(300)에 장착된다. 센서부(400)는 측정된 골반(10)의 기울기 등에 관한 정보를 무선 또는 유선에 의해 외부의 전자기기로 송신한다. The
센서부(400)는 센서하우징(410), 측정부(420), 송신부(430), 전원부(440)를 포함한다. 센서하우징(410)은 전달부(330)에 안착되는 것으로, 판 형상으로 형성된다. 센서하우징(410)은 전달부(330)의 이동에 따라 하우징(100)의 길이방향을 따라 이동된다.The
센서하우징(410)은 전달부(330)의 일측(도 3 기준 우측)에 안착되는 제1수용홈부(411)와, 전달부(330)의 타측(도 3 기준 좌측)에 안착되는 제2수용홈부(413)를 구비한다. The
제1수용홈부(411)는 전달부(330)의 일측의 외측면에 본딩 등에 고정된다. 제2수용홈부(413)는 전달부(300)의 타측에 전달부(300)의 표면을 따라 이동 가능하게 안착된다(도 5 참조). The
측정부(420)는 센서하우징(410)에 장착되고, 골반(10)의 기울기를 측정한다. 측정부(420)는 가속도 센서, 가속도 센서 배열(array), 지자기 센서 등을 포함하여 이루어지는 것으로, 골반(10)의 상태, 위치, 기울기 등을 측정한다. 측정부(420)는 센서하우징(410)의 이동에 따라 이동된다. 측정부(420)는 골반(10)에 임의로 부착된 복수의 제1측정부(11), 제2측정부(13), 제3측정부(15)와의 통신을 통해 골반(10)의 각도를 삼각측량 등을 이용하여 측정할 수 있다. The measuring
송신부(430)는 센서하우징(410)에 장착되고, 측정부(420)에서 측정되는 정보를 송신한다. 송신부(430)는 측정부(420)에서 측정된 정보와, 복수의 제1측정부(11), 제2측정부(13), 제3측정부(15)와의 통신을 통해 골반(10)의 각도를 삼각측량 등을 이용하여 측정 정보를 외부의 전자기기로 송신한다. 수술자는 외부의 전자기기에서 계산된 정보를 통해 골반(10)의 기울기 등의 정보를 인식한다.The
전원부(440)는 센서하우징(410)에 장착되고, 전원공급부(500)와 연결되어, 측정부(420)와 송신부(430)에 전원을 공급한다.The
본 발명에서 센서부(400)는 모터부(200)와 이동부(300)의 작동에 의해 하우징(100)의 길이방향을 따라 이동되면서 복수의 제1측정부(11), 제2측정부(13), 제3측정부(15)와의 기준 위치를 기준으로 하여, 골반(10)의 기울기를 측정할 수 있다. In the present invention, the
도 6을 참조하여, 본 발명의 일 실시예에 따른 골반 자세 추적 장치(1)의 작동을 설명한다.Referring to Figure 6, the operation of the pelvic
골반 자세 추적 장치(1)는 항문을 통해 인체 내부에 삽입된다. 인체 내부에 삽입된 상태에서, 전원공급부(500) 등을 통해 모터부(200)로 전원이 공급되어 모터부(200)가 작동된다. 모터부(200)는 이동부(300)의 구동부(310)를 작동시킨다. The pelvic
구동부(310)에서 제1기어부(313), 제2기어부(315), 제1롤러부(317)가 작동되면서, 제1롤러부(317)에 감긴 전달부(330)가 회전된다. 제1롤러부(317)가 일방향(도 6 기준 반시계방향)으로 회전되면, 전달부(300)의 일측(도 6 기준 하측)은 우측방향으로 이동되고, 전달부(300)의 타측(도 6 기준 상측)은 좌측방향으로 이동된다. As the
이때 전달부(330)에 장착된 센서하우징(410)은 전달부(330)의 타측이 고정된 제1수용홈부(411)에 의해 좌측방향으로 이동된다. 센서하우징(410)의 이동에 의해 이동되면서, 측정부(420)는 골반(10)을 측정하고, 송신부(430)를 통해 외부의 전자기기로 측정부(420)의 측정정보와 복수의 제1측정부(11), 제2측정부(13), 제3측정부(15)와의 정보를 통해 골반(10)의 기울기를 확인할 수 있다. At this time, the
수술자는 측정된 골반(10)의 기울기를 통해, 고관절 인공관절물인 비구컵을 환자의 골반(10)에 장착할 수 있다. The operator may mount the acetabular cup, which is a hip joint artifact, to the patient's
다음으로 본 발명의 다른 실시예에 따른 골반 자세 추적 장치(1a)를 설명한다. 도 7은 본 발명의 다른 실시예에 따른 골반 자세 추적 장치를 개략적으로 나타내는 사시도이고, 도 8은 본 발명의 다른 실시예에 따른 골반 자세 추적 장치를 개략적으로 나타내는 단면도이고, 도 9는 본 발명의 다른 실시예에 따른 골반 자세 추적 장치에서 제1고정부와 제2고정부의 작동을 개략적으로 나타내는 작동도이고, 도 10은 본 발명의 다른 실시예에 따른 골반 자세 추적 장치에서 제1고정부가 모터부의 작동에 따라 이동되는 것을 개략적으로 나타내는 작동도이고, 도 11은 본 발명의 다른 실시예에 따른 골반 자세 추적 장치에서 제1고정부와 제2고정부의 작동을 개략적으로 나타내는 작동도이고, 도 12는 본 발명의 다른 실시예에 따른 골반 자세 추적 장치에서 제2고정부가 탄성부의 작동에 따라 이동되는 것을 개략적으로 나타내는 작동도이다. Next, a pelvic
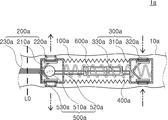
도 7 내지 도 12를 참조하면, 본 발명의 다른 실시예에 따른 골반 자세 추적 장치(1a)는 하우징(100a), 제1고정부(200a), 제2고정부(300a), 탄성부(400a), 이동부(500a), 센서부(600a)를 포함한다.7 to 12, the pelvic
하우징(100a)은 항문을 통해 인체 내부의 직장(10a)에 삽입된다. 하우징(100a)은 원통형으로 형성된다. 하우징(100a)은 하우징(100a)의 길이방향을 따라 신축 가능한 주름관 형상으로 형성된다. 하우징(100a)은 주름관 형상으로 형성되어, 하우징(100a)의 길이방향을 따라 접철되면서 신축될 수 있다. 하우징(100a)의 양측에 제1고정부(200a)와 제2고정부(300a)가 각각 장착된다.The
제1고정부(200a)는 하우징(100a)의 일측(도 8 기준 좌측)에 장착되고, 직장(10a)에 착탈 가능하다. 제1고정부(200a)는 제1고정하우징(210a), 제1팽창부(220a), 제1유체공급부(230a)를 포함한다.The
제1고정하우징(210a)은 하우징(100a)의 일측(도 8 기준 좌측)에 장착되는 것으로, 내부 공간에 이동부(500a)의 모터부(510a)를 수용한다. 제1팽창부(220a)는 제1고정하우징(210a)에 복수개가 장착되는 것으로, 제1유체공급부(230a)로부터 유체의 공급에 의해 직장(10a) 측으로 팽창되고, 제1유체공급부(230a)로부터 유체 공급의 제한에 의해 직장(10a) 측에서 제1고정하우징(210a) 측으로 축소된다. 제1팽창부(220a)가 직장(10a) 측으로 팽창되어, 직장(10a)의 내벽에 접하면서 제1고정하우징(210a)의 위치를 고정한다. 제1팽창부(220a)는 제1유체공급부(230a)로부터 유체의 공급 여부에 팽창 또는 축소될 수 있는 재질을 포함하여 이루어진다.The first fixed
도 7에서 제1팽창부(220a)는 제1고정하우징(210a)의 상측과 하측에 각각 장착되는 한 쌍으로 이루어지는 것이 도시되어 있으나, 이에 한정되지 않고 제1고정하우징(210a)에 복수개가 균등 간격으로 장착될 수 있다. In FIG. 7, the
제1유체공급부(230a)는 신체 외부에서 제1팽창부(220a)에 유체를 공급한다. 제1유체공급부(230a)는 제1팽창부(220a)에 기체 또는 액체의 유체를 공급한다. 본 발명에서 제1유체공급부(230a)는 공기를 제1팽창부(230a)에 공급할 수 있다. The first
제2고정부(300a)는 하우징(100a)의 타측(도 8 기준 우측)에 장착되고, 직장(10a)에 착탈 가능하다. 제2고정부(300a)는 제2고정하우징(310a), 제2팽창부(320a), 제2유체공급부(330a)를 포함한다.The
제2고정하우징(310a)은 하우징(100a)의 일측(도 8 기준 우측)에 장착되는 것으로, 내부 공간에 탄성부(400a)의 일부를 수용한다. 제2팽창부(320a)는 제2고정하우징(310a)에 복수개가 장착되는 것으로, 제2유체공급부(330a)로부터 유체의 공급에 의해 직장(10a) 측으로 팽창되고, 제2유체공급부(330a)로부터 유체 공급의 제한에 의해 직장(10a) 측에서 제2고정하우징(310a) 측으로 축소된다. 제2팽창부(320a)가 직장(10a) 측으로 팽창되어, 직장(10a)의 내벽에 접하면서 제2고정하우징(310a)의 위치를 고정한다. 제2팽창부(320a)는 제2유체공급부(330a)로부터 유체의 공급 여부에 팽창 또는 축소될 수 있는 재질을 포함하여 이루어진다.The second fixed
도 7에서 제2팽창부(320a)는 제2고정하우징(210a)의 상측과 하측에 각각 장착되는 한 쌍으로 이루어지는 것이 도시되어 있으나, 이에 한정되지 않고 제2고정하우징(310a)에 복수개가 균등 간격으로 장착될 수 있다. In FIG. 7, it is shown that the
제2유체공급부(330a)는 신체 외부에서 제2팽창부(320a)에 유체를 공급한다. 제2유체공급부(330a)는 제2팽창부(320a)에 기체 또는 액체의 유체를 공급한다. 본 발명에서 제2유체공급부(330a)는 공기를 제2팽창부(330a)에 공급할 수 있다.The second
본 발명에서 하우징(100a), 제1고정부(200a), 제2고정부(300a)는 방수, 방오 처리되어 이루어진다. 또한 하우징(100a), 제1고정부(200a), 제2고정부(300a)는 소독 처리가 가능한 소재로 감싸여 진다. 하우징(100a), 제1고정부(200a), 제2고정부(300a)는 방수, 방오 처리되어, 수술시 인체 내부 위생상의 문제가 없도록 한다. In the present invention, the
탄성부(400a)는 하우징(100a) 내부에 장착되고, 제1고정부(200a)와 제2고정부(300a)에 탄성력을 제공한다. 탄성부(400a)의 일측(도 8 기준 좌측)은 제1고정부(200a)의 제1고정하우징(210a)에 고정되고, 탄성부(400a)의 타측(도 8 기준 우측)은 제2고정부(300a)의 제2고정하우징(310a)에 고정된다. 본 발명에서 탄성부(400a)는 코일 스프링(coiled spring)으로 이루어진다. The
이동부(500a)는 제1고정부(200a)의 제1고정하우징(210a)에 장착되고, 제2고정부(300a)의 제2고정하우징(310a)에 연결되며 제2고정부(300a)를 하우징(100a)의 길이방향을 따라 이동시킨다. 이동부(500a)의 와이어(510a)에 센서부(600a)가 장착되고, 이동부(500a)의 작동에 따라 센서부(600a)가 하우징(100a)의 길이방향을 따라 이동된다. The moving
이동부(500a)는 모터부(510a), 와이어(520a), 전원공급부(530a)를 포함한다. 모터부(510a)는 전원공급부(530a)을 통해 전원을 외부로부터 공급받아 와이어(520a)를 권취 또는 권출하거나, 내장 배터리를 통해 전원을 공급받아 와이어(520a)를 권취 또는 권출할 수 있다. The moving
와이어(520a)는 일측(도 8 기준 좌측)이 모터부(510a)에 연결되고, 타측(도 8 기준 우측)이 제2고정하우징(310a)에 연결되고, 외측면에 센서부(600a)의 센서하우징(610a)가 장착된다. 와이어(520a)는 모터부(510a)의 구동에 따라 권취 또는 권출되면서 제2고정하우징(310a)을 이동시킨다. 모터부(510a)가 권취하면 와이어(520a)는 일방향(도 8 기준 좌측방향)으로 이동되고, 제2고정부(300a)와 센서부(600a)도 일방향(도 8 기준 좌측방향)으로 이동된다. The
모터부(510a)가 권출하면 와이어(520a)는 모터부(510a)에 대해서 자유단이 되고, 제2고정하우징(310a)이 탄성부(400a)의 탄성력에 의해 타방향(도 8 기준 우측)으로 이동된다. When the
전원공급부(530a)는 제1고정하우징(210a)를 통해 모터부(510a)와 연결되어, 모터부(510a)에 전원을 공급한다. 또한 전원공급부(530a)는 센서부(600a)에서 측정된 정보를 외부의 전자기기로 전달하는 용도로 사용될 수 있다. 여기서 전자기기는 센서부(400a)에서 측정된 정보를 수술자에서 표시할 수 있는 외부 출력기구인 모니터 등을 구비한 전자기기를 의미한다.The
센서부(600a)는 이동부(500a)와, 하우징(100a), 제1고정부(200a), 제2고정부(300a)에 의해 하우징(100a) 내부에서 이동되고, 골반(10)의 기울기를 측정한다. 센서부(600a)의 하우징(100) 내부에서 이동 가능하게 이동부(500a)의 와이어(520a)에 장착된다. 센서부(600a)는 측정된 골반(10)의 기울기 등에 관한 정보를 무선 또는 유선에 의해 외부의 전자기기로 송신한다. The
센서부(600a)는 센서하우징(610a), 측정부(620a), 송신부(630a), 전원부(640a)를 포함한다. 센서하우징(610a)은 와이어(520a)에 장착되는 것으로, 판 형상으로 형성된다. 센서하우징(610a)은 와이어(520a)의 이동에 따라 하우징(100a)의 길이방향을 따라 이동된다.The
측정부(620a)는 센서하우징(610a)에 장착되고, 골반(10)의 기울기를 측정한다. 측정부(620a)는 가속도 센서, 가속도 센서 배열(array), 지자기 센서 등을 포함하여 이루어지는 것으로, 골반(10)의 상태, 위치, 기울기 등을 측정한다. 측정부(620a)는 센서하우징(610a)의 이동에 따라 이동된다. 측정부(620a)는 골반(10)에 임의로 부착된 복수의 제1측정부(11), 제2측정부(13), 제3측정부(15)와의 통신을 통해 골반(10)의 각도를 삼각측량 등을 이용하여 측정할 수 있다. The measuring
송신부(630a)는 센서하우징(610a)에 장착되고, 측정부(620a)에서 측정되는 정보를 송신한다. 송신부(630a)는 측정부(620a)에서 측정된 정보와, 복수의 제1측정부(11), 제2측정부(13), 제3측정부(15)와의 통신을 통해 골반(10)의 각도를 삼각측량 등을 이용하여 측정 정보를 외부의 전자기기로 송신한다. 수술자는 외부의 전자기기에서 계산된 정보를 통해 골반(10)의 기울기 등의 정보를 인식한다.The
전원부(640a)는 센서하우징(610a)에 장착되고, 전원공급부(530a)와 연결되어, 측정부(620a)와 송신부(630a)에 전원을 공급한다.The
본 발명에서 센서부(600a)는 이동부(500a)와, 하우징(100a), 제1고정부(200a), 제2고정부(300a)에 의해 하우징(100a) 내부에서 이동되면서 복수의 제1측정부(11), 제2측정부(13), 제3측정부(15)와의 기준 위치를 기준으로 하여, 골반(10)의 기울기를 측정할 수 있다. In the present invention, the
도 9 내지 도 12를 참조하여 본 발명의 다른 실시예에 따른 골반 자세 추적 장치(1a)의 작동을 설명한다. 도 9 내지 도 12에서 L0는 이동의 기준선을 표시한 것이다.The operation of the pelvic
도 9를 참조하면, 본 발명의 다른 실시예에 따른 골반 자세 추적 장치(1a)가 항문을 통해 직장(10a)에 삽입된다. 제2유체공급부(330a)를 통해 제2팽창부(320a)로 유체가 공급된다. 제2팽창부(320a)는 공급된 유체의 팽창되어 직장(10a)의 내벽과 접한다. 이때 제1팽창부(220a)에는 유체가 공급되지 않아 제1고정하우징(210a)에서 축소된 상태로 있어 직장(10a)의 내벽과 이격된다. 9, the pelvic
도 10을 참조하면, 제2팽창부(320a)가 직장(10a)의 내벽에 접한 상태에서, 모터부(510a)의 작동에 의해 와이어(520a)가 권취된다. 제2팽창부(320a)는 직장(10a)의 내벽에 접하고, 와이어(520a)가 권취되어 제1고정부(200a)가 도 10 기준 우측방향으로 이동된다. 즉 제1고정부(200a)가 L0 기준 우측으로 이동된다. 따라서 하우징(100a)의 주름 형상이 수축되고, 와이어(520a)에 장착된 센서부(600a)도 우측방향으로 이동된다. 이때 탄성부(400a)는 제1고정부(200a)의 이동에 의해 압축된다.Referring to FIG. 10, in a state in which the second
도 11을 참조하면, 제1유체공급부(230a)를 통해 제1팽창부(220a)로 유체가 공급된다. 제1팽창부(220a)는 공급된 유체의 팽창되어 직장(10a)의 내벽과 접한다. 이때 제2팽창부(320a)에는 유체가 공급되지 않아 제2고정하우징(310a)에서 축소된 상태로 있어 직장(10a)의 내벽과 이격된다. Referring to FIG. 11, fluid is supplied to the
도 12를 참조하면, 제1팽창부(220a)가 직장(10a)의 내벽에 접한 상태에서, 모터부(510a)의 작동에 의해 와이어(520a)가 권출된다. 제1팽창부(220a)는 직장(10a)의 내벽에 접하고, 와이어(520a)가 권출되어 제2고정부(300a)가 와이어(520a)에서 고정이 해제되고, 제2고정부(300a)는 탄성부(400a)의 탄성력에 의해 도 12 기준 우측방향으로 이동된다. 즉 제2고정부(300a)가 도 11에서 보다 더 우측으로 이동된다. 따라서 하우징(100a)의 주름 형상이 팽창된다.Referring to FIG. 12, in a state in which the
본 발명에 따른 골반 자세 추적 장치에 의하면, 골반의 기울기 등을 센서부에 의해 실시간으로 측정하고, 수술자에서 그 정보가 전달되어 비구컵의 거치가 용이하게 이루어질 수 있다. According to the pelvic posture tracking apparatus according to the present invention, the tilt of the pelvis is measured in real time by a sensor unit, and the information is transmitted from the operator, so that the acetabular cup can be easily mounted.
또한 본 발명에 따르면 모터부와 이동부의 구조에 의해 센서부를 이동시켜 골반의 기울기 등을 측정할 수 있으므로, 제품의 단가를 낮추어 수술비 등을 절감할 수 있다. In addition, according to the present invention, since the sensor unit can be moved by the structure of the motor unit and the moving unit to measure the inclination of the pelvis, it is possible to reduce the unit cost of the product and reduce the operation cost.
본 발명은 도면에 도시되는 일 실시예를 참고로 하여 설명되었으나, 이는 예시적인 것에 불과하며, 당해 기술이 속하는 분야에서 통상의 지식을 가진 자라면 이로부터 다양한 변형 및 균등한 타 실시예가 가능하다는 점을 이해할 것이다. 따라서 본 발명의 진정한 기술적 보호범위는 아래의 청구범위에 의해서 정하여져야 할 것이다.The present invention has been described with reference to an embodiment shown in the drawings, but this is only exemplary, and various modifications and other equivalent embodiments are possible from those of ordinary skill in the field to which the technology belongs. Will understand. Therefore, the true technical protection scope of the present invention should be determined by the following claims.
1: 골반 자세 추적 장치
10: 골반
11: 제1측정부
13: 제2측정부
15: 제3측정부
100: 하우징
110: 모서리부
200: 모터부
300: 이동부
310: 구동부
311: 제1기둥부
313: 제1기어부
315: 제2기어부
317: 제1롤러부
320: 종동부
321: 제2기둥부
323: 제2롤러부
330: 전달부
400: 센서부
410: 센서하우징
411: 제1수용홈부
413: 제2수용홈부
420: 측정부
430: 송신부
440: 전원부
500: 전원공급부
1a: 골반 자세 추적 장치
10a: 직장
100a: 하우징
200a: 제1고정부
210a: 제1고정하우징
220a: 제1팽창부
230a: 제1유체공급부
300a: 제2고정부
310a: 제고정하우징
320a: 제2팽창부
330a: 제2유체공급부
400a: 탄성부
500a: 이동부
510a: 모터부
520a: 와이어
530a: 전원공급부
600a: 센서부
610a: 센서하우징
620a: 측정부
630a: 송신부
640a: 전원부1: pelvic posture tracking device 10: pelvis
11: first measuring unit 13: second measuring unit
15: third measuring unit 100: housing
110: corner portion 200: motor portion
300: moving part 310: driving part
311: first pillar 313: first gear
315: second gear part 317: first roller part
320: follower 321: second pillar
323: second roller unit 330: transmission unit
400: sensor unit 410: sensor housing
411: first receiving groove 413: second receiving groove
420: measuring unit 430: transmitting unit
440: power unit 500: power supply unit
1a: pelvic
100a:
210a: first fixed
230a: first
310a: fixing
330a: second
500a: moving
520a:
600a:
620a: measuring
640a: power supply
Claims (14)
상기 하우징의 내부에 장착되는 모터부;
상기 하우징 내부에 이동 가능하게 장착되고, 골반의 기울기를 측정하는 센서부; 및
상기 하우징 내부에 수용되고, 상기 모터부에 의해 작동되며, 상기 센서부를 상기 하우징 내부에서 이동시키는 이동부를 포함하고,
상기 이동부는,
상기 하우징의 일측에 배치되고, 상기 모터부와 연결되어 상기 모터부의 작동에 따라 작동되는 구동부;
상기 하우징의 타측에 상기 구동부와 이격되게 배치되고, 상기 구동부에 의해 작동되는 종동부; 및
상기 구동부의 동력을 상기 종동부로 전달하고, 상기 센서부가 안착되며, 상기 센서부를 이동시키는 전달부를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
A housing inserted into the rectum;
A motor unit mounted inside the housing;
A sensor unit movably mounted inside the housing and measuring a tilt of the pelvis; And
A moving part accommodated in the housing, operated by the motor part, and moving the sensor part in the housing,
The moving part,
A driving unit disposed on one side of the housing, connected to the motor unit, and operated according to the operation of the motor unit;
A driven part disposed on the other side of the housing to be spaced apart from the driving part and operated by the driving part; And
A pelvic posture tracking device comprising a transmission unit that transmits the power of the driving unit to the follower, the sensor unit is seated, and moves the sensor unit.
상기 구동부는,
상기 하우징에 고정되는 제1기둥부;
상기 모터부에 의해 회전되는 제1기어부;
상기 제1기둥부에 회전 가능하게 장착되고, 상기 제1기어부에 치합되어 회전되는 제2기어부; 및
상기 제1기둥부에 회전 가능하게 장착되고, 상기 제2기어부에 고정되며, 외측면에 상기 전달부가 감기는 제1롤러부를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 1,
The driving unit,
A first pillar portion fixed to the housing;
A first gear unit rotated by the motor unit;
A second gear portion rotatably mounted on the first pillar portion and engaged with the first gear portion to rotate; And
A pelvic posture tracking device comprising: a first roller unit rotatably mounted on the first pillar, fixed to the second gear, and wound on an outer surface of the transmission unit.
상기 종동부는,
상기 제1기둥부와 이격 배치되고, 상기 하우징에 고정되는 제2기둥부; 및
상기 제2기둥부에 회전 가능하게 장착되고, 외측면에 상기 전달부가 감기며, 상기 전달부를 통해 전달되는 상기 제1롤러부의 회전에 따라 회전되는 제2롤러부를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 2,
The driven part,
A second pillar portion spaced apart from the first pillar portion and fixed to the housing; And
Pelvic posture tracking, characterized in that it includes a second roller part rotatably mounted on the second pillar part, the delivery part wound around the outer surface, and rotated according to the rotation of the first roller part transmitted through the delivery part. Device.
상기 센서부는,
상기 전달부에 안착되는 센서하우징;
상기 센서하우징에 장착되고, 상기 골반의 기울기를 측정하는 측정부; 및
상기 센서하우징에 장착되고, 상기 측정부에서 측정되는 정보를 송신하는 송신부를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 1,
The sensor unit,
A sensor housing mounted on the transfer unit;
A measuring unit mounted on the sensor housing and measuring an inclination of the pelvis; And
A pelvic posture tracking apparatus comprising a transmitter mounted on the sensor housing and transmitting information measured by the measurement unit.
상기 전달부는 상기 구동부와 상기 종동부를 감싸는 타원형의 밴드 형상으로 이루어지고,
상기 센서하우징은 상기 전달부의 일측에 안착되는 제1수용홈부와 상기 전달부의 타측에 안착되는 제2수용홈부를 구비하고,
상기 제1수용홈부는 상기 전달부의 일측에 고정되고,
상기 제2수용홈부는 상기 전달부의 타측에 이동 가능하게 안착되는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 4,
The transmission part is made of an elliptical band shape surrounding the driving part and the driven part,
The sensor housing includes a first receiving groove seated on one side of the delivery unit and a second receiving groove seated on the other side of the delivery unit,
The first receiving groove is fixed to one side of the delivery unit,
Pelvic posture tracking device, characterized in that the second receiving groove is movably seated on the other side of the delivery unit.
상기 하우징는 원통형으로 형성되고,
상기 하우징의 모서리부는 곡형으로 형성되는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 1,
The housing is formed in a cylindrical shape,
Pelvic posture tracking device, characterized in that the corner portion of the housing is formed in a curved shape.
상기 하우징은 방수, 방오 처리되어 이루어지는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 1,
The housing is a pelvic posture tracking device, characterized in that the waterproof and antifouling treatment.
상기 하우징의 양측에 각각 장착되고, 상기 직장에 착탈 가능한 제1고정부와 제2고정부;
상기 하우징 내부에 장착되고, 상기 제1고정부와 상기 제2고정부에 탄성력을 제공하는 탄성부;
상기 제1고정부에 장착되고, 상기 제2고정부에 연결되며 상기 제2고정부를 상기 하우징의 길이방향을 따라 이동시키는 이동부; 및
상기 이동부에 장착되고, 골반의 기울기를 측정하는 센서부를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
A housing inserted into the rectum;
A first fixing part and a second fixing part respectively mounted on both sides of the housing and detachable from the workplace;
An elastic part mounted inside the housing and providing an elastic force to the first fixing part and the second fixing part;
A moving part mounted on the first fixing part, connected to the second fixing part, and moving the second fixing part along the longitudinal direction of the housing; And
A pelvic posture tracking device mounted on the moving unit and including a sensor unit configured to measure an inclination of the pelvis.
상기 제1고정부는,
상기 하우징의 일측에 장착되는 제1고정하우징;
상기 제1고정하우징에 복수개가 장착되고, 유체의 공급 여부에 따라 상기 직장 측으로 팽창되는 제1팽창부; 및
상기 제1팽창부에 유체를 공급하는 제1유체공급부를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 8,
The first fixing unit,
A first fixed housing mounted on one side of the housing;
A first expansion unit that is mounted on the first fixed housing and expands toward the workplace according to whether a fluid is supplied or not; And
A pelvic posture tracking device comprising a first fluid supply unit supplying a fluid to the first expansion unit.
상기 제2고정부는,
상기 하우징의 타측에 장착되는 제2고정하우징;
상기 제2고정하우징에 복수개가 장착되고, 유체의 공급 여부에 따라 상기 직장 측으로 팽창되는 제2팽창부; 및
상기 제2팽창부에 유체를 공급하는 제2유체공급부를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 9,
The second fixing unit,
A second fixed housing mounted on the other side of the housing;
A second expansion unit that is mounted on the second fixed housing and expands toward the workplace according to whether or not a fluid is supplied; And
A pelvic posture tracking device comprising a second fluid supply unit supplying a fluid to the second expansion unit.
상기 이동부는,
상기 제1고정하우징의 내부에 장착되는 모터부; 및
일측이 상기 모터부에 연결되고, 타측이 상기 제2고정하우징에 연결되고, 외측면에 상기 센서부가 장착되며, 상기 모터부의 구동에 따라 권취 또는 권출되면서 상기 제2고정하우징을 이동시키는 와이어를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 10,
The moving part,
A motor unit mounted inside the first fixed housing; And
One side is connected to the motor unit, the other side is connected to the second fixed housing, the sensor unit is mounted on the outer surface, and includes a wire for moving the second fixed housing while being wound or unwound according to the driving of the motor unit. Pelvic posture tracking device, characterized in that to.
상기 센서부는,
상기 와이어에 장착되는 센서하우징;
상기 센서하우징에 장착되고, 상기 골반의 기울기를 측정하는 측정부; 및
상기 센서하우징에 장착되고, 상기 측정부에서 측정되는 정보를 송신하는 송신부를 포함하는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 11,
The sensor unit,
A sensor housing mounted on the wire;
A measuring unit mounted on the sensor housing and measuring an inclination of the pelvis; And
A pelvic posture tracking apparatus comprising a transmitter mounted on the sensor housing and transmitting information measured by the measurement unit.
상기 하우징은 상기 하우징의 길이방향을 따라 신축 가능한 주룸관 형상으로 형성되는 것을 특징으로 하는 골반 자세 추적 장치.
The method of claim 8,
The housing is a pelvic posture tracking device, characterized in that formed in the shape of a main room tube that can be stretched along the longitudinal direction of the housing.
상기 하우징, 상기 제1고정부, 상기 제2고정부는 방수, 방오 처리되어 이루어지는 것을 특징으로 하는 골반 자세 추적 장치.The method of claim 8,
The housing, the first fixing portion, and the second fixing portion is a pelvic posture tracking device, characterized in that the waterproof and antifouling treatment.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190117030A KR102248423B1 (en) | 2019-09-23 | 2019-09-23 | Pelvic posture tracking device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190117030A KR102248423B1 (en) | 2019-09-23 | 2019-09-23 | Pelvic posture tracking device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20210035387A true KR20210035387A (en) | 2021-04-01 |
| KR102248423B1 KR102248423B1 (en) | 2021-05-07 |
Family
ID=75441358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190117030A KR102248423B1 (en) | 2019-09-23 | 2019-09-23 | Pelvic posture tracking device |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102248423B1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030220589A1 (en) * | 1999-11-24 | 2003-11-27 | Gunnar Leivseth | Method and device for training pelvic floor muscles |
| US20060100595A1 (en) * | 2004-11-09 | 2006-05-11 | Von Dyck Peter M | Bowel management system with physiologic sensors |
| KR100617490B1 (en) * | 2004-09-03 | 2006-09-04 | 한국과학기술원 | Acetabular cup orientator attachable on pelvic in THR |
| KR20180098653A (en) * | 2015-12-28 | 2018-09-04 | 노비펠 홀딩 에이피에스 | Pelvic floor training and profiling device for human body cavity insertion and a method for visualizing pelvic floor muscle contraction |
-
2019
- 2019-09-23 KR KR1020190117030A patent/KR102248423B1/en active IP Right Grant
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030220589A1 (en) * | 1999-11-24 | 2003-11-27 | Gunnar Leivseth | Method and device for training pelvic floor muscles |
| KR100617490B1 (en) * | 2004-09-03 | 2006-09-04 | 한국과학기술원 | Acetabular cup orientator attachable on pelvic in THR |
| US20060100595A1 (en) * | 2004-11-09 | 2006-05-11 | Von Dyck Peter M | Bowel management system with physiologic sensors |
| KR20180098653A (en) * | 2015-12-28 | 2018-09-04 | 노비펠 홀딩 에이피에스 | Pelvic floor training and profiling device for human body cavity insertion and a method for visualizing pelvic floor muscle contraction |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102248423B1 (en) | 2021-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3463112B1 (en) | Medical device for cutting bone | |
| CN101524299B (en) | Implantable restriction system and method having an antenna | |
| US20190133473A1 (en) | Systems, devices and methods for assessment of body cavity pressures | |
| CN103533898B (en) | Magnetic grappling robot system | |
| AU2005253654B2 (en) | Tool carrier provided with a ring and mountable on an endoscope | |
| CN112702957A (en) | Medical imaging method using multiple arrays | |
| JPWO2008120753A1 (en) | Medical manipulator device and actuator suitable therefor | |
| JP2013521866A (en) | Ultrasonic imaging probe and method | |
| IL170833A (en) | Propulsion mechanism for endoscopic systems | |
| KR20050102536A (en) | Command-following laparoscopic system | |
| WO2009054860A1 (en) | Endoscopic system for obtaining 3-dimensional human vision simulated imaging with real dynamic convergence | |
| US9125718B2 (en) | Electronically enhanced access port for a fluid filled implant | |
| JP2017124168A (en) | System for robot-assisted control of transrectal probe, for example for use in carrying out prostate echography | |
| WO2017220822A1 (en) | Surgical robotic system and method for handling a surgical robotic system | |
| CN110226966A (en) | For cutting the surgery system of anatomical structure according at least one objective plane | |
| JP2020533042A (en) | Joint device | |
| KR102248423B1 (en) | Pelvic posture tracking device | |
| EP3784142B1 (en) | Laparoscopic instruments | |
| KR102403114B1 (en) | therapeutic aids | |
| JP4414178B2 (en) | Operating table with fluid pressure massager | |
| JPH0654835A (en) | Micromachine system | |
| JP2021534994A (en) | A device designed to be positioned close to a joint and a general system with the above device | |
| US11642118B1 (en) | Knee tensioner-balancer and method | |
| KR102433707B1 (en) | Assisting robot for surgical operation | |
| CN113997270B (en) | Two-degree-of-freedom upper limb posture keeping exoskeleton based on positive pressure blocking and intermittent meshing mechanism |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |