JP5958069B2 - Image projection apparatus and image projection method - Google Patents
Image projection apparatus and image projection method Download PDFInfo
- Publication number
- JP5958069B2 JP5958069B2 JP2012112913A JP2012112913A JP5958069B2 JP 5958069 B2 JP5958069 B2 JP 5958069B2 JP 2012112913 A JP2012112913 A JP 2012112913A JP 2012112913 A JP2012112913 A JP 2012112913A JP 5958069 B2 JP5958069 B2 JP 5958069B2
- Authority
- JP
- Japan
- Prior art keywords
- projection
- image
- image data
- unit
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





























Landscapes
- Projection Apparatus (AREA)
- Transforming Electric Information Into Light Information (AREA)
Description
本発明は、画像を被投射媒体に投射する画像投射装置および画像投射方法に関する。 The present invention relates to an image projection apparatus and an image projection method for projecting an image onto a projection medium.
入力された画像信号に基づき表示素子を駆動して、その画像信号に係る画像をスクリーンや壁面などに投射する投射装置が知られている。このような投射装置では、その投射装置の備える投射手段の投射方向を規定する機構上の制限や、表示素子の解像度の制限などにより、投射可能な情報量に制限が生じていた。 A projection device is known that drives a display element based on an input image signal and projects an image related to the image signal onto a screen, a wall surface, or the like. In such a projection apparatus, the amount of information that can be projected is limited due to a limitation on the mechanism that defines the projection direction of the projection means included in the projection apparatus or a limitation on the resolution of the display element.
そこで、入力された画像信号に係る画像の解像度が、投射装置が備える表示素子の解像度よりも大きい場合に、投射される画像の情報量を減らして画像の投射を行うようにした投射装置が開発された。 Therefore, a projection device has been developed that projects an image by reducing the amount of information of the projected image when the resolution of the image related to the input image signal is larger than the resolution of the display element included in the projection device. It was done.
その第1の例として、入力された画像信号に係る画像の解像度を減らし、投射される画像の大きさ(面積)を表示素子の解像度に基づき投射可能な大きさ(面積)まで縮小してから、その縮小された画像の投射を行う投射装置を挙げることができる。また、第2の例として、入力された画像信号に係る画像から一部の領域を切り出し、その切り出された領域に係る画像のみを投射する投射装置を挙げることができる。後者の例の投射装置には、切り出され投射される領域を連続的に変更していく、所謂スクロールなどによって、入力された画像信号に係る画像全体を投射可能とするものもある。 As a first example, after reducing the resolution of the image related to the input image signal and reducing the size (area) of the projected image to a size (area) that can be projected based on the resolution of the display element. And a projection device that projects the reduced image. Further, as a second example, a projection device that cuts out a partial area from an image related to an input image signal and projects only an image related to the cut out area can be cited. In the latter example of the projection apparatus, there is a projection apparatus that can project an entire image related to an input image signal by so-called scrolling or the like that continuously changes a cut and projected area.
ところが、上述した第1の例の投射装置は、入力された画像信号に係る画像全体を投射することができる一方で、解像度の低減に基づく画像の大きさの縮小処理により、被投射媒体上に表示される画像の品質が低下してしまうという問題がある。別の側面から述べると、画像の大きさの縮小処理により、入力された画像信号が有している高い解像度が無駄になってしまうという問題があるとも言える。 However, while the projection apparatus according to the first example described above can project the entire image related to the input image signal, the image size reduction process based on the resolution reduction reduces the image size onto the projection target medium. There is a problem that the quality of the displayed image is degraded. From another aspect, it can be said that there is a problem that the high resolution of the input image signal is wasted due to the image size reduction processing.
また、上述した、第2の例の投射装置は、被投射媒体上に表示される画像においても、その画像信号の有する解像度を保持することができる。ところが、この第2の例の投射装置は、入力された画像信号に係る画像の全体を一度に投射することができないとう問題を有する。 Moreover, the projection apparatus of the second example described above can maintain the resolution of the image signal even in the image displayed on the projection medium. However, the projection apparatus of the second example has a problem that the entire image related to the input image signal cannot be projected at a time.
これに対して、特許文献1には、本体の姿勢や位置を検出し、その検出結果に基づき原表示画像から実際に表示する実表示画像を抽出し、その実表示画像を投射すると共に、ユーザがそのプロジェクタを上下左右に移動させることで実表示画像として抽出される領域を原表示画像内で上下左右に変更するプロジェクタが開示されている。特許文献1のプロジェクタによれば、ユーザは、被投射媒体に対する本体の姿勢や被投射媒体までの距離を調整することで、投射させたい領域の画像のみを必要に応じて適宜投射させることができる。
On the other hand,
しかしながら、特許文献1では、例えば投射される表示画像を撮像素子としてのCCD(Charge Coupled Device)で撮像して、プロジェクタの姿勢を検出しているため、姿勢検出の精度が表示画像の内容に依存してしまうおそれがあるという問題点があった。例えば、暗くした室内において夜のシーンなど暗い画面を投射させた場合に、姿勢の検出ができなくなるおそれがある。また、姿勢検出を、CCDによる撮像画像を解析して行っているので、姿勢検出の結果の表示画像への反映に遅延が生じてしまうという問題点があった。
However, in
本発明は、上記に鑑みてなされたものであって、表示素子の解像度よりも高解像度の画像をより高品位に投射することを目的とする。 The present invention has been made in view of the above, and an object thereof is to project an image having a higher resolution than that of a display element with higher quality.
上述した課題を解決し、目的を達成するために、本発明は、画像データに基づき光源からの光を光変調素子により変調して所定の画角で投射する投射部と、投射部による投射方向を第1の投射方向から第2の投射方向まで、駆動パルスに応じた所定角度毎に変更する投射方向変更部と、第1の投射方向と、投射方向変更部が変更した投射方向との間の投射角を導出する投射角導出部と、入力された入力画像データを記憶する記憶部と、投射部が投射する画像データとして、画角および投射角に基づいて、記憶部に記憶された入力画像データの画像の一部の領域を切り出した切り出し画像データを所定周期のタイミングで生成する画像切り出し部と、記憶部に記憶された入力画像データの画像を、投射部が第1の投射方向から第2の投射方向に亘って投射する場合に、所定周期内での、切り出し画像データ生成タイミング位置と隣接する位置との駆動パルス間の間隔と、互いに隣接する駆動パルス間の間隔とのうち少なくとも一部の間隔が不均等な間隔になるように駆動パルスを生成する生成部とを有することを特徴とする。 In order to solve the above-described problems and achieve the object, the present invention provides a projection unit that modulates light from a light source by a light modulation element based on image data and projects it at a predetermined angle of view, and a projection direction by the projection unit Between the first projection direction and the second projection direction between the projection direction changing unit that changes every predetermined angle corresponding to the drive pulse, the first projection direction, and the projection direction changed by the projection direction changing unit. A projection angle deriving unit for deriving the projection angle, a storage unit for storing inputted input image data, and an input stored in the storage unit based on the angle of view and the projection angle as image data projected by the projection unit An image cutout unit that generates cutout image data obtained by cutting out a partial area of the image data at a predetermined cycle timing, and an image of the input image data stored in the storage unit from the first projection direction. In the second projection direction When projected, in a predetermined period, and the interval between drive pulses and a position adjacent to the cutout image data generation timing position, at least a portion of the distance of the interval between drive pulses adjacent non I And a generation unit that generates drive pulses so that the intervals are uniform.
また、本発明は、画像データに基づき光源からの光を光変調素子により変調して所定の画角で投射する投射部による投射方向を、第1の投射方向から第2の投射方向まで、駆動パルスに応じた所定角度毎に変更する投射方向変更ステップと、第1の投射方向と、投射方向変更ステップにより変更した投射方向との間の投射角を導出する投射角導出ステップと、入力された入力画像データを記憶する記憶ステップと、画角および投射角に基づいて、記憶ステップで記憶された入力画像データの画像の一部の領域を切り出した切り出し画像データを所定周期のタイミングで生成する画像切り出しステップと、記憶ステップで記憶された入力画像データの画像を、投射部が第1の投射方向から第2の投射方向に亘って投射する場合に、所定周期内での、切り出し画像データ生成タイミング位置と隣接する位置との駆動パルス間の間隔と、互いに隣接する駆動パルス間の間隔とのうち少なくとも一部の間隔が不均等な間隔になるように駆動パルスを生成する生成ステップとを有することを特徴とする。 Further, the present invention drives the projection direction by the projection unit that projects light with a predetermined angle of view by modulating light from the light source based on the image data from the first projection direction to the second projection direction. A projection direction changing step for changing every predetermined angle according to the pulse, a projection angle deriving step for deriving a projection angle between the first projection direction and the projection direction changed by the projection direction changing step, and input A storage step for storing input image data, and an image for generating cutout image data obtained by cutting out a partial area of the image of the input image data stored in the storage step based on the angle of view and the projection angle at a predetermined cycle When the projection unit projects the image of the input image data stored in the clipping step and the storage step from the first projection direction to the second projection direction, within a predetermined period. , The spacing between the drive pulses of the position adjacent to the cutout image data generation timing position, and generates a driving pulse such that at least a portion of the interval is unequal spacing among the spacing between the drive pulses that are adjacent to each other And a generation step.
本発明によれば、表示素子の解像度よりも高解像度の画像をより高品位に投射することが可能となるという効果を奏する。 According to the present invention, it is possible to project an image with a higher resolution than that of the display element with higher quality.
以下に図面を参照しながら、本発明に係る画像投射装置および画像投射方法の好適な実施形態を説明する。かかる実施形態に示す具体的な数値および外観構成などは、本発明の理解を容易とするための例示にすぎず、特に断る場合を除き、本発明を限定するものではない。なお、本発明に直接関係のない要素は詳細な説明および図示を省略している。 Hereinafter, preferred embodiments of an image projection apparatus and an image projection method according to the present invention will be described with reference to the drawings. Specific numerical values and appearance configurations shown in the embodiments are merely examples for facilitating understanding of the present invention, and do not limit the present invention unless otherwise specified. Detailed explanation and illustration of elements not directly related to the present invention are omitted.
<第1の実施形態>
<画像投射装置の外観>
図1は、本発明の第1の実施形態に係る画像投射装置(プロジェクタ装置)1の外観の例を示す図である。図1(a)はプロジェクタ装置1を操作部が設けられる第1面側から見た斜視図、図1(b)はプロジェクタ装置1を操作部と対向する側の第2面側から見た斜視図である。プロジェクタ装置1は、ドラム部10と基台20とを備える。ドラム部10は基台20に対して回転駆動が可能な回転体である。そして、基台20がそのドラム部10を回転可能に支持する支持部や、ドラム部10の回転駆動制御や画像処理制御等の各種制御を行う回路部を有する。
<First Embodiment>
<Appearance of image projector>
FIG. 1 is a diagram showing an example of the appearance of an image projection apparatus (projector apparatus) 1 according to the first embodiment of the present invention. 1A is a perspective view of the
ドラム部10は、基台20の一部である側板部21aおよび21bの内側に設けられた、ベアリングなどからなる、図示しない回転軸によって回転駆動可能に支持される。ドラム部10の内部には、光源と、光源から射出された光を画像データに従い変調する表示素子と、表示素子を駆動する駆動回路と、表示素子で変調された光を外部に投射する光学系を含む光学エンジン部と、光源などを冷却するためのファンなどによる冷却手段とが設けられている。
The
ドラム部10は、窓部11および13が設けられる。窓部11は、上述した光学系の投射レンズ12から投射された光が外部に照射されるように設けられる。窓部13は、例えば赤外線や超音波などを利用して被投射媒体までの距離を導出する距離センサが設けられる。また、ドラム部10には、ファンによる放熱のための吸排気を行う吸排気口22aを備えている。
The
基台20の内部には、回路部の各種基板や電源部、ドラム部10を回転駆動するための駆動部などが設けられている。なお、この駆動部によるドラム部10の回転駆動については、後述する。基台20の上記第1面側には、ユーザがこのプロジェクタ装置1を制御するために各種操作を入力するための操作部14と、ユーザが図示しないリモートコントロールコマンダを使用してこのプロジェクタ装置1を遠隔制御する際の、リモートコントロールコマンダから送信された信号を受信する受信部15とが設けられている。操作部14は、ユーザの操作入力を受け付ける各種操作子や、このプロジェクタ装置1の状態を表示するための表示部などを有している。
Inside the
基台20の上記第1面側および上記第2面側には、それぞれ吸排気口16aおよび16bが設けられ、回転駆動されてドラム部10の吸排気口22aが基台20側を向いた姿勢をとっている場合でも、ドラム部10内の放熱効率を低下させないよう、吸気または排気を行うことが可能となっている。また、筐体の側面に設けられる吸排気口17は、回路部の放熱のための吸排気を行う。
Intake and
<ドラム部の回転駆動>
図2は、基台20に設けられた駆動部32によるドラム部10の回転駆動について説明するための図である。図2(a)は、ドラム部10のカバーなどを取り去った状態のドラム30と、基台20に設けられた駆動部32の構成を示す図である。ドラム30には、上述の窓部11に対応する窓部34と、窓部13に対応する窓部33とが設けられている。ドラム30は回転軸36を有し、この回転軸36により、支持部31aおよび31bに設けられた、ベアリングを用いた軸受け37に対して回転駆動可能に取り付けられる。
<Drum section rotation drive>
FIG. 2 is a diagram for explaining the rotational driving of the
ドラム30の一方の面には、円周上にギア35が設けられている。支持部31bに設けられた駆動部32により、ギア35を介してドラム30が回転駆動される。ギア35の内周部の突起46aおよび46bは、ドラム30の回転動作の始点ならびに終点を検出するために設けられる。
On one surface of the
図2(b)は、ドラム30および基台20に設けられた駆動部32の構成をより詳細に示すための拡大図である。駆動部32は、モータ40を有すると共に、モータ40の回転軸により直接駆動されるウォームギア41、ウォームギア41による回転を伝達するギア42aおよび42b、ならびに、ギア42bから伝達された回転をドラム30のギア35に伝達するギア43を含むギア群を有する。このギア群によりモータ40の回転をギア35に伝達することで、ドラム30をモータ40の回転に応じて回転させることができる。モータ40としては、例えば所定のパルス幅の駆動パルスにより所定角度毎の回転制御を行うステッピングモータを適用することができる。
FIG. 2B is an enlarged view for showing the configuration of the
支持部31bに対して、フォトインタラプタ51aおよび51bが設けられる。フォトインタラプタ51aおよび51bは、それぞれ、ギア35の内周部に設けられる突起46bおよび46aを検出する。フォトインタラプタ51aおよび51bの出力信号は、後述する回転制御部104に供給される。第1の実施形態では、フォトインタラプタ51aに突起46bが検出されることで、回転制御部104は、ドラム30の姿勢が回転動作の終点に達した姿勢であると判断する。また、フォトインタラプタ51bに突起46aが検出されることで、回転制御部104は、ドラム30の姿勢が回転動作の始点に達した姿勢であると判断する。
以下、フォトインタラプタ51bに突起46aが検出される位置から、フォトインタラプタ51aに突起46bが検出される位置まで、ドラム30の円周における長さが大きい方の弧を介してドラム30が回転する方向を、正方向とする。すなわち、ドラム30の回転角は、正方向に向けて増加する。
Hereinafter, from the position where the
なお、第1の実施形態では、フォトインタラプタ51bが突起46aを検出する検出位置と、フォトインタラプタ51aが突起46bを検出する検出位置との間の回転軸36を挟む角度が270°になるように、フォトインタラプタ51aおよび51b、ならびに、突起46aおよび46bがそれぞれ配される。
In the first embodiment, the angle between which the
例えば、モータ40としてステッピングモータを適用した場合、フォトインタラプタ51bによる突起46aの検出タイミングと、モータ40を駆動するための駆動パルス数とに基づき、ドラム30の姿勢を特定し、投射レンズ12による投射角を求めることができる。
For example, when a stepping motor is applied as the
なお、モータ40は、ステッピングモータに限らず、例えばDCモータを適用することもできる。この場合、例えば、図2(b)に示されるように、ギア43に対して同一軸上にギア43と共に回転するコードホイール44を設けると共に、支持部31bに対してフォトリフレクタ50aおよび50bを設け、ロータリエンコーダを構成する。
The
コードホイール44は、例えば、半径方向に位相が異ならされる透過部45aおよび反射部45bが設けられる。フォトリフレクタ50aおよび50bにより、コードホイール44からのそれぞれの位相の反射光を受光することで、ギア43の回転速度と回動方向とを検出できる。そして、これら検出されたギア43の回転速度および回動方向に基づいてドラム30の回転速度および回動方向が導出される。導出されたドラム30の回転速度および回動方向と、フォトインタラプタ51aによる突起46bの検出結果とに基づき、ドラム30の姿勢を特定し、投射レンズ12による投射角を求めることができる。
The code wheel 44 is provided with, for example, a
上述のような構成において、ドラム部10の初期姿勢を、投射レンズ12による投射方向が鉛直方向を向いている姿勢とする。したがって、初期状態では、投射レンズ12が完全に基台20に隠れている。図3(a)は、初期姿勢のドラム部10の様子を示す。第1の実施形態では、この初期姿勢においてフォトインタラプタ51bに突起46aが検出され、後述する回転制御部104により、ドラム30が回転動作の始点に達していると判断される。
In the configuration as described above, the initial posture of the
なお、以下では、特に記載のない限り、「ドラム部10の方向」および「ドラム部10の角度」がそれぞれ「投射レンズ12による投射方向」および「投射レンズ12による投射角」と同義であるものとする。
In the following description, unless otherwise specified, “the direction of the
プロジェクタ装置1が起動されると、投射レンズ12による投射方向が上記第1面側を向くように、駆動部32がドラム部10の回転を開始する。その後、ドラム部10は、例えば、ドラム部10の方向すなわち投射レンズ12による投射方向が第1面側において水平になる位置まで回転し、回転を一旦停止したとする。この、投射レンズ12による投射方向が第1面側において水平になった場合の投射レンズ12の投射角を、投射角0°と定義する。図3(b)に、投射角0°のときの、ドラム部10(投射レンズ12)の姿勢の様子を示す。以下、この投射角0°の姿勢のときを基準として、投射角θとなるドラム部10(投射レンズ12)の姿勢を、θ姿勢と呼ぶ。
When the
例えば、0°姿勢において画像データが入力され、光源が点灯されたとする。ドラム部10において、光源から射出された光が、駆動回路により駆動された表示素子により画像データに従い変調されて光学系に入射される。そして、画像データに従い変調された光が、投射レンズ12から水平方向に投射され、スクリーンや壁面などの被投射媒体に照射される。
For example, assume that image data is input in a 0 ° posture and the light source is turned on. In the
ユーザは、操作部14などを操作することで、画像データによる投射レンズ12からの投射を行ったまま、回転軸36を中心に、ドラム部10を回転させることができる。例えば、0°姿勢から正方向にドラム部10を回転させて回転角を90°として(90°姿勢)、投射レンズ12からの光を基台20の底面に対して垂直上向きに投射させることができる。図3(c)は、投射角θが90°のときの姿勢、つまり90°姿勢のドラム部10の様子を示す。
The user can rotate the
ドラム部10は、90°姿勢からさらに正方向に回転させることができる。この場合、投射レンズ12の投射方向は、基台20の底面に対して垂直上向きの方向から、上記第2面側の方向に変化していく。図3(d)は、ドラム部10が図3(c)の90°姿勢からさらに正方向に回転され、投射角θが180°のときの姿勢、つまり180°姿勢となった様子を示す。第1の実施形態に係るプロジェクタ装置1では、この180°姿勢においてフォトインタラプタ51aに突起46bが検出され、後述する回転制御部104により、ドラム30の回転動作の終点に達したと判断される。
The
詳細は後述するが、第1の実施形態によるプロジェクタ装置1は、投射を行ったまま、例えば図3(b)〜図3(d)に示されるようにしてドラム部10を回転させることで、投射レンズ12による投射角に応じて、画像データにおける投射領域を変化(移動)させることができる。これにより、投射された画像の内容および当該投射された画像の被投射媒体における投射位置の変化と、入力された画像データに係る全画像領域における投射する画像として切り出された画像領域の内容および位置の変化とを対応させることができる。したがって、ユーザは、入力画像データに係る全画像領域中のどの領域が投射されているかを、投射された画像の被投影媒体における位置に基づき直感的に把握することができると共に、投射された画像の内容を変更する操作を直感的に行うことができる。
Although details will be described later, the
また、光学系は、光学ズーム機構を備えており、操作部14に対する操作により、投射画像が被投射媒体に投射される際の大きさを拡大・縮小することができる。なお、以下では、この光学系による投射画像が被投射媒体に投射される際の大きさの拡大・縮小を、単に「ズーム」ということもある。例えば、光学系がズームを行った場合、投射画像は、そのズームが行われた時点の光学系の光軸を中心に拡大・縮小されることになる。
Further, the optical system includes an optical zoom mechanism, and the size when the projected image is projected onto the projection medium can be enlarged or reduced by an operation on the
ユーザがプロジェクタ装置1による投射画像の投射を終了し、操作部14に対してプロジェクタ装置1の停止を指示する操作を行いプロジェクタ装置1を停止させると、先ず、ドラム部10が初期姿勢に戻るように回転制御される。ドラム部10が鉛直方向を向き、初期姿勢に戻ったことが検出されると、光源が消灯され、光源の冷却に要する所定時間の後、電源がOFFとされる。ドラム部10を鉛直方向に向けてから電源をOFFとすることで、非使用時に投射レンズ12のレンズ表面が汚れるのを防ぐことができる。
When the user ends the projection of the projection image by the
<プロジェクタ装置1の内部構成>
次に、上述したような、第1の実施形態に係るプロジェクタ装置1の動作を実現するための構成について説明する。図4は、プロジェクタ装置1において、基台20内に設けられる回路部、ならびに、ドラム部10内に設けられる光学エンジン部110の一例の構成を示す。
<Internal configuration of
Next, a configuration for realizing the operation of the
光学エンジン部110は、光源111、表示素子114および投射レンズ12を含む。光源111は、例えばそれぞれ赤色(R)、緑色(G)および青色(B)を発光する3のLED(Light Emitting Diode)を含む。光源111から射出されたRGB各色の光束は、それぞれ図示されない光学系を介して表示素子114に照射される。
The
以下の説明において、表示素子114は、透過型液晶表示素子であり、例えば水平1280画素×垂直800画素のサイズを有するものとする。勿論、表示素子114のサイズはこの例に限定されるものではない。表示素子114は、図示されない駆動回路によって駆動され、RGB各色の光束を画像データに従いそれぞれ変調して射出する。表示素子114から射出された、画像データに従い変調されたRGB各色の光束は、図示されない光学系を介して投射レンズ12に入射され、プロジェクタ装置1の外部に投射される。
In the following description, the
なお、表示素子114は、透過型液晶表示素子を用いた構成に限定されない。例えば、表示素子114として、LCOS(Liquid Crystal on Silicon)を用いた反射型液晶表示素子、あるいは、DMD(Digital Micromirror Device)で構成してもよい。その場合、適用する表示素子に応じた光学系および駆動回路でプロジェクタ装置1を構成するものとする。
Note that the
投射レンズ12は、組み合わされた複数のレンズと、制御信号に応じてレンズを駆動するレンズ駆動部とを有する。例えば、レンズ駆動部は、窓部13に設けられた距離センサからの出力信号に基づき測距された結果に従い投射レンズ12に含まれるレンズを駆動して、フォーカス制御を行う。また、レンズ駆動部は、後述する画角制御部106から供給されるズーム命令に従いレンズを駆動して画角を変化させ、光学ズームの制御を行う。
The
上述したように、光学エンジン部110は、回転機構部105により360°の回動を可能とされたドラム部10内に設けられる。回転機構部105は、図2を用いて説明した駆動部32と、ドラム部10側の構成であるギア35とを含み、モータ40の回転を利用してドラム部10を所定に回転させる。すなわち、この回転機構部105によって、投射レンズ12の投射方向が変更されることになる。
As described above, the
プロジェクタ装置1の回路部は、画像切り出し部100と、メモリ101と、画像処理部102と、画像制御部103と、回転制御部104と、画角制御部106と、タイミングジェネレータ(TG)107と、CPU120とを含む。タイミングジェネレータ107は、垂直同期信号VDを生成し、画像処理部102と、画像制御部103と、回転制御部104と、表示素子114を駆動する図示されない駆動回路とに、生成した垂直同期信号VDを供給する。
The circuit unit of the
CPU(Central Processing Unit)120は、それぞれ図示を省略するROM(Read Only Memory)およびRAM(Random Access Memory)が接続され、ROMに予め記憶されたプログラムに従い、RAMをワークメモリとして用いて、投射画像の投射、投射角の変更、画像の切り出しといった、プロジェクタ装置1の各種処理を統括的に制御する。
A CPU (Central Processing Unit) 120 is connected to a ROM (Read Only Memory) and a RAM (Random Access Memory) (not shown), respectively, and uses a RAM as a work memory in accordance with a program stored in the ROM in advance to project a projected image. Various processes of the
例えば、CPU120は、ユーザ操作に応じて操作部14から供給された制御信号に基づき、プログラムに従いこのプロジェクタ装置1の各部を制御する。これにより、ユーザ操作に従ったプロジェクタ装置1の動作が可能となる。これに限らず、CPU120は、例えば図示されないデータ入力部から入力されたスクリプトに従いプロジェクタ装置1の各部を制御する。これにより、プロジェクタ装置1の動作の自動制御が可能となる。
For example, the
静止画像または動画像の画像データがプロジェクタ装置1に入力され、画像切り出し部100に供給される。画像切り出し部100は、供給された画像データをメモリ101に格納する。メモリ101は、画像データを画像単位で格納する。すなわち、画像データが静止画像データの場合は1枚の静止画像毎に、動画像データの場合は当該動画像データを構成するフレーム画像毎に、対応するデータを格納する。メモリ101は、例えば、デジタルハイビジョン放送の規格に対応し、1920画素×1080画素のフレーム画像を1または複数枚格納可能とされている。画像切り出し部100は、メモリ101に格納された画像データに係るフレーム画像の全領域から、画像制御部103が指定した画像領域を切り出して(抽出して)画像データとして出力する。
Image data of a still image or a moving image is input to the
なお、入力画像データは、メモリ101における画像データの格納単位に対応したサイズに整形されて、プロジェクタ装置1に入力されると好ましい。この例では、入力画像データは、予め1920画素×1080画素に画像サイズを整形されてプロジェクタ装置1に入力される。これに限らず、任意のサイズで入力された画像データを1920画素×1080画素のサイズの画像データに整形する画像整形部を、プロジェクタ装置1の画像切り出し部100の前段に設けてもよい。
The input image data is preferably shaped into a size corresponding to the image data storage unit in the
画像処理部102に対して、画像切り出し部100から出力された画像データが供給される。画像処理部102は、画像処理を施した画像データを、タイミングジェネレータ107から供給される垂直同期信号VDに示されるタイミングに基づいて出力する。
The image data output from the
画像処理部102は、例えば図示されないメモリを用いて、供給された画像データに対して画像処理を施す。例えば、画像処理部102は、画像切り出し部100から供給された画像データに対して、サイズが表示素子114のサイズに合致するようにサイズ変換処理を施す。画像処理部102は、それ以外にも様々な画像の処理を施すことが出来る。例えば、画像データに対するサイズ変換処理を、一般的な線形変換処理を用いて行うことができる。なお、画像切り出し部100から供給された画像データのサイズが表示素子114のサイズと合致している場合は、当該画像データをそのまま出力してもよい。
The
さらには、画像処理部102は、投射される画像に対し、いわゆるキーストン補正に関する処理を施すこともできる。
Furthermore, the
また、画像のアスペクト比を一定にして補間(オーバーサンプリング)することにより所定の特性の補間フィルタをかけて画像の一部または全部を大きくする、折り返し歪みをとるために縮小率に応じたローパスフィルタをかけて間引き(サブサンプリング)することにより画像の一部または全部を小さくする、又はフィルタをかけずにそのままの大きさとすることもできる。 Also, interpolation (oversampling) with a constant aspect ratio of the image applies an interpolation filter with a predetermined characteristic to enlarge part or all of the image, and a low-pass filter according to the reduction ratio to eliminate aliasing distortion It is also possible to reduce a part or all of the image by thinning (subsampling) over time or to keep the size as it is without applying a filter.
また、画像が斜め方向に投射されたときに、周辺部でフォーカスがずれて画像がぼけてしまうのを防止するために、ラプラシアンなどのオペレータ(もしくは一次元フィルタを水平方向と垂直方向にかけること)によるエッジ強調処理を行うことで投射された、上述の周辺部のぼけた画像部分のエッジを強調することができる。 In addition, when an image is projected in an oblique direction, an operator such as Laplacian (or a one-dimensional filter is applied in the horizontal and vertical directions to prevent the image from being out of focus and blurring in the periphery. The edge of the above-described blurred image portion in the peripheral portion can be emphasized by performing the edge enhancement processing according to (1).
さらには、上記キーストン補正などにより投射サイズ(面積)が変更されることで、画面全体の明るさが変化してしまうことを防止するために、明るさを均一に保つように、適応的な輝度調整を行うこともできる。そして、画像処理部102は、投射される画像テクスチャーの周辺部が斜め線を含むような場合には、エッジジャギが目立たないように、局所的なハーフトーンを混入したり、局所的なローパスフィルタを施したりして、エッジジャギをぼかすことで、斜め線がギザギザな線として観察されるのを防止することもできる。
Furthermore, in order to prevent the brightness of the entire screen from changing due to the projection size (area) being changed by the keystone correction or the like, adaptive brightness is maintained so that the brightness remains uniform. Adjustments can also be made. Then, when the peripheral portion of the projected image texture includes an oblique line, the
画像処理部102から出力された画像データは、表示素子114に供給される。実際には、この画像データは、表示素子114を駆動する駆動回路に供給される。駆動回路は、供給された画像データおよび垂直同期信号VDに基づいて表示素子114を駆動する。例えば駆動回路は、表示素子114による表示を、タイミングジェネレータ107から供給される垂直同期信号VDのタイミングに従い更新する。
The image data output from the
回転制御部104は、例えば操作部14に対するユーザ操作に応じたCPU120からの命令に従い、ステッピングモータであるモータ40を駆動するための所定のパルス幅の駆動パルスを生成し、回転機構部105に供給する。回転制御部104は、タイミングジェネレータ107から供給される垂直同期信号VDに対して同期的に駆動パルスを生成する。
The
回転機構部105は、上述した駆動部32と、フォトインタラプタ51aおよび51bとを含む。回転機構部105において、駆動部32は、回転制御部104から供給される駆動パルスに従いモータ40を駆動して、ドラム部10(ドラム30)の回転動作を制御する。
The
一方、回転制御部104に対して、回転機構部105から上述したフォトインタラプタ51aおよび51bの出力が供給される。回転制御部104は、例えばカウンタを有し、駆動パルスのパルス数を計数する。回転制御部104は、フォトインタラプタ51bの出力に基づき突起46aの検出タイミングを取得し、カウンタに計数されたパルス数を、この突起46aの検出タイミングでリセットする。回転制御部104は、カウンタに計数されたパルス数に基づき、ドラム部10(ドラム30)の角度を逐次的に求めることができ、ドラム部10の姿勢(角度)を取得できる。ドラム部10の角度を示す情報は、画像制御部103に供給される。このようにして、回転制御部104は、投射レンズ12の投射方向が変更された場合に、変更前の投射方向と変更後の投射方向との間の角度を導出することができる。
On the other hand, the output of the
画角制御部106は、例えば操作部14に対するユーザ操作に応じたCPU120からの命令に従い、投射レンズ12に対してズーム指示、つまり画角の変更指示を出す。投射レンズ12のレンズ駆動部は、このズーム指示に従いレンズを駆動し、ズーム制御を行う。画角制御部106は、ズーム指示、及びそのズーム指示に係るズーム倍率等から導出された画角に関する情報を画像制御部103に供給する。
The angle-of-
画像制御部103は、回転制御部104から供給される角度に関する情報と画角制御部106から供給される画角に関する情報とに基づき、画像切り出し部100による画像切り出し領域を指定する。このとき、画像制御部103は、画像データにおける切り出し領域を、投射レンズ12の変更の前後の投射方向間の角度に応じたライン位置に基づき指定する。画像制御部103は、画像切り出し部100に対して画像切り出し領域の指定を行う。さらに、画像制御部103は、画像切り出し部100に対して、指定した画像切り出し領域からの画像データの読み出しを、タイミングジェネレータ107から供給された垂直同期信号VDと同期して指示する。
The
なお、上述では、画像切り出し部100、画像処理部102、画像制御部103、回転制御部104および画角制御部106がそれぞれ別個のハードウェアであるかのように説明したが、これはこの例に限定されない。例えば、これら各部は、CPU120上で動作するプログラムのモジュールにより実現されてもよい。
In the above description, the
<画像データの切り出し処理>
次に、第1の実施形態に係る、画像制御部103および画像切り出し部100による、メモリ101に格納される画像データの切り出し処理について説明する。図5は、メモリ101に格納される画像データの切り出し処理を説明するための概念図である。図5(a)を参照し、メモリ101に格納される画像データ140から指定された切り出し領域の画像データ141を切り出す例について説明する。
<Cut out image data>
Next, a process for cutting out image data stored in the
メモリ101は、例えば垂直方向にライン単位、水平方向に画素単位でアドレスが設定され、ラインのアドレスは、画像(画面)の下端から上端に向けて増加し、画素のアドレスは、画像の左端から右端に向けて増加するものとする。
In the
画像制御部103は、画像切り出し部100に対して、メモリ101に格納されるQライン×P画素の画像データ140の切り出し領域として、垂直方向にラインq0およびラインq1をアドレス指定し、水平方向に画素p0およびp1をアドレス指定する。画像切り出し部100は、このアドレス指定に従い、メモリ101から、ラインq0〜q1の範囲内の各ラインを、画素p0〜p1にわたって読み出す。このとき、読み出し順は、例えば各ラインは画像の上端から下端に向けて読み出され、各画素は画像の左端から右端に向けて読み出されるものとする。メモリ101に対するアクセス制御の詳細については、後述する。
The
画像切り出し部100は、メモリ101から読み出した、ラインq0〜q1、ならびに、画素p0〜p1の範囲の画像データ141を画像処理部102に供給する。画像処理部102では、供給された画像データ141による画像のサイズを表示素子114のサイズに合わせる、サイズ変換処理を行う。一例として、表示素子114のサイズがRライン×S画素である場合、下記の式(1)および式(2)を共に満たす、最大の倍率mを求める。そして、画像処理部102は、画像データ141をこの倍率mで拡大し、図5(b)に例示されるように、サイズ変換された画像データ141’を得る。
m×(p1−p0)≦S …(1)
m×(q1−q0)≦R …(2)
The
m × (p 1 −p 0 ) ≦ S (1)
m × (q 1 −q 0 ) ≦ R (2)
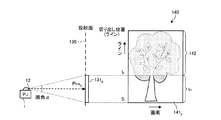
次に、第1の実施形態による、投射角に応じた切り出し領域の指定(更新)について説明する。図6は、ドラム部10が0°姿勢、すなわち、投射角0°の場合の切り出し領域指定の例を示す。プロジェクタ装置(PJ)1において、投射レンズ12により、画角αで以て、スクリーンなどの被投射媒体である投射面130に対して、投射角0°で画像1310を投射した場合の投射位置を、投射レンズ12から投射される光の光束中心に対応する位置Pos0とする。また、投射角0°では、メモリ101に格納される画像データの、投射角0°の姿勢で投射を行うように予め指定された領域の下端のラインSから、ラインLまでの画像データによる画像が投射されるものとする。ラインSからラインLの領域には、ライン数lnのラインが含まれるものとする。
Next, the designation (update) of the cutout area according to the projection angle according to the first embodiment will be described. FIG. 6 shows an example of clip region designation when the
なお、ライン数lnは、表示素子114の最大の有効領域のライン数である。また、画角αは、表示素子114において表示が有効とされている垂直方向の有効領域が最大値を取るときに画像を投射した場合、すなわち、ライン数lnの画像を投射した場合の、投射画像を投射レンズ12から垂直方向に見込む角である。
The number of lines ln is the number of lines in the maximum effective area of the
画角αおよび表示素子114の有効領域について、より具体的な例を用いて説明する。表示素子114は、垂直方向のサイズが800ラインであるとする。例えば、投射画像データの垂直方向のサイズが800ラインであり、表示素子114の全てのラインを用いて投射画像データの投射を行う場合、表示素子114の垂直方向の有効領域が最大値の800ライン(=ライン数ln)となる。画角αは、この場合に投射レンズ12から投射画像の1〜800ラインを見込む角となる。
The angle of view α and the effective area of the
また、投射画像データの垂直方向のサイズが600ラインであり、表示素子114の800ライン(=ライン数ln)のうち600ラインのみを用いて投射画像データの投射を行う場合も考えられる。このとき、表示素子114の垂直方向の有効領域が600ラインとなる。この場合は、画角αの、有効領域の最大値に対する投射画像データによる有効領域の部分のみが投射される。
Further, the projection image data may have a vertical size of 600 lines, and the projection image data may be projected using only 600 lines of 800 lines (= number of lines ln) of the
画像制御部103は、画像切り出し部100に対して、メモリ101に格納される画像データ140のラインSからラインLまでを切り出して読み出すように指示する。なお、ここでは、水平方向には、画像データ140の左端から右端までを全て読み出すものとする。画像切り出し部100は、画像制御部103の指示に従い、画像データ140のラインS〜Lの領域を切り出し領域に設定し、設定された切り出し領域の画像データ141を読み出して画像処理部102に供給する。図6の例では、投射面130には、画像データ140のラインSからラインLまでの、ライン数lnの画像データ1410による画像1310が、投射位置Pos0に投射される。この場合、画像データ140の全領域のうち、ラインLから上端のラインまでに係る領域の画像データ142による画像は、投射されないことになる。
The
次に、例えば操作部14に対するユーザ操作によりドラム部10が回転され、投射レンズ12の投射角が角度θとなった場合について説明する。第1の実施形態では、画像制御部103は、メモリ101上の画像データ140に対する投射角θに応じた切り出し領域を、垂直同期信号VDに同期したタイミングで指定する。
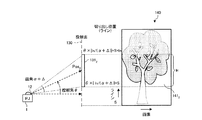
Next, for example, the case where the
投射角θに対する切り出し領域の設定について、図7を用いてより具体的に説明する。例えばドラム部10を、投射レンズ12による投射位置が0°姿勢から正方向に回転させ、投射レンズ12の投射角が角度θ(>0°)になった場合について考える。この場合、投射面130に対する投射位置が、投射角0°の投射位置Pos0に対して上方の投射位置Pos1に移動する。このとき、画像制御部103は、画像切り出し部100に対して、メモリ101に格納される画像データ140に対する切り出し領域を、次の式(3)および式(4)に従い指定する。式(3)は、切り出し領域の下端のラインRSを示し、式(4)は、切り出し領域の上端のラインRLを示す。
RS=θ×(ln/α)+S …(3)
RL=θ×(ln/α)+S+ln …(4)
The setting of the cut-out area with respect to the projection angle θ will be described more specifically with reference to FIG. For example, consider a case in which the projection position of the
R S = θ × (ln / α) + S (3)
R L = θ × (ln / α) + S + ln (4)
なお、式(3)および式(4)において、値lnおよび値αは、それぞれ上述したライン数lnおよび画角αを示す。また、値Sは、図6を用いて説明した、0°姿勢における切り出し領域の下端のラインをそれぞれ示す。 In the expressions (3) and (4), the value ln and the value α indicate the number of lines ln and the angle of view α, respectively. Further, the value S indicates a line at the lower end of the cutout region in the 0 ° posture described with reference to FIG.
式(3)および式(4)において、(ln/α)は、画角αがライン数lnを投射する場合の、単位画角当たりのライン数(投射面の形状によって変化する略平均化されたライン数の概念を含む)を示す。したがって、θ×(ln/α)は、プロジェクタ装置1における、投射レンズ12による投射角θに対応するライン数を表す。これは、投射角が角度Δθだけ変化するとき、投射画像の位置が、投射画像におけるライン数{Δθ×(ln/α)}分の距離だけ移動することを意味する。したがって、式(3)および式(4)は、投射角が角度θの場合の投射画像の、画像データ140における下端および上端のライン位置をそれぞれ示す。これは、投射角θにおけるメモリ101上の画像データ140に対する読み出しアドレスに対応する。
In Expressions (3) and (4), (ln / α) is approximately averaged when the angle of view α projects the number of lines ln (the number of lines per unit angle of view (which varies depending on the shape of the projection surface). Including the concept of number of lines). Therefore, θ × (ln / α) represents the number of lines corresponding to the projection angle θ by the
このように、第1の実施形態においては、メモリ101から画像データ140を読み出す際のアドレスが、投射角θに応じて指定される。これにより、例えば図7の例では、メモリ101から、画像データ140の、投射角θに応じた位置の画像データ1411が読み出され、読み出された画像データ1411に係る画像1311が、投射面130の投射角θに対応する投射位置Pos1に投射される。
As described above, in the first embodiment, an address for reading the
これにより、第1の実施形態によれば、表示素子114のサイズよりも大きいサイズの画像データ140を投射する場合に、投射される画像内の位置と、画像データ内の位置との対応関係が保たれる。また、ドラム30を回転駆動するためのモータ40の駆動パルスに基づき投射角θを求めているため、ドラム部10の回転に対して略遅延の無い状態で投射角θを得ることができると共に、投射画像や周囲の環境に影響されずに投射角θを得ることが可能である。
Thereby, according to 1st Embodiment, when projecting the
次に、投射レンズ12による光学ズームを行った場合の切り出し領域の設定について説明する。既に説明したように、プロジェクタ装置1の場合、レンズ駆動部が駆動され投射レンズ12の画角αが増加または減少されることで、光学ズームが行われる。光学ズームによる画角の増加分を角度Δとし、光学ズーム後の投射レンズ12の画角を画角(α+Δ)とする。
Next, the setting of the cut-out area when the optical zoom by the
この場合、光学ズームにより画角が増加しても、メモリ101に対する切り出し領域は変化しない。換言すれば、光学ズーム前の画角αによる投射画像に含まれるライン数と、光学ズーム後の画角(α+Δ)による投射画像に含まれるライン数は、同一である。したがって、光学ズーム後は、光学ズーム前に対して単位角度当たりに含まれるライン数が変化することになる。
In this case, even if the angle of view increases due to the optical zoom, the cutout area for the
光学ズームを行った場合の切り出し領域の指定について、図8を用いてより具体的に説明する。図8の例では、投射角θの状態で、画角αに対して画角Δ分を増加させる光学ズームを行っている。光学ズームを行うことで、投射面130に投射される投射画像は、例えば投射レンズ12に投射される光の光束中心(投射位置Pos2)を共通として、画像1312として示されるように、光学ズームを行わない場合に対して画角Δ分拡大される。
The designation of the cut-out area when optical zoom is performed will be described more specifically with reference to FIG. In the example of FIG. 8, optical zoom is performed to increase the angle of view Δ by the angle of view α in the state of the projection angle θ. By performing the optical zoom, the projection image projected on the
画角Δ分の光学ズームを行った場合、画像データ140に対して切り出し領域として指定されるライン数をlnラインとすると、単位角度当たりに含まれるライン数は、{ln/(α+Δ)}で表される。したがって、画像データ140に対する切り出し領域は、次の式(5)および式(6)により指定される。なお、式(5)および式(6)における各変数の意味は、上述の式(3)および式(4)と共通である。
RS=θ×{ln/(α+Δ)}+S …(5)
RL=θ×{ln/(α+Δ)}+S+ln …(6)
When the optical zoom for the angle of view Δ is performed, assuming that the number of lines designated as a cutout region for the
R S = θ × {ln / (α + Δ)} + S (5)
R L = θ × {ln / (α + Δ)} + S + ln (6)
画像データ140から、この式(5)および式(6)に示される領域の画像データ1412が読み出され、読み出された画像データ1412に係る画像1312が、投射レンズ12により、投射面130の投射位置Pos2に対して投射される。
From the
このように、光学ズームを行った場合には、単位角度当たりに含まれるライン数が光学ズームを行わない場合に対して変化し、投射角θの変化に対するラインの変化量が、光学ズームを行わない場合に比べて異なったものとなる。これは、メモリ101に対する投射角θに応じた読み出しアドレスの指定において、光学ズームにより増加した画角Δ分のゲインが変更された状態である。
As described above, when the optical zoom is performed, the number of lines included per unit angle changes compared to the case where the optical zoom is not performed, and the amount of change in the line with respect to the change in the projection angle θ performs the optical zoom. It will be different compared to the case without it. This is a state where the gain corresponding to the angle of view Δ increased by the optical zoom is changed in the designation of the read address corresponding to the projection angle θ with respect to the
第1の実施形態においては、メモリ101から画像データ140を読み出す際のアドレスは、投射角θと投射レンズ12の画角αに応じて指定される。これにより、光学ズームを行った場合であっても、投射すべき画像データ1412のアドレスを、メモリ101に対して適切に指定することができる。したがって、光学ズームを行った場合であっても、表示素子114のサイズよりも大きいサイズの画像データ140を投射する場合に、投射される画像内の位置と、画像データ内の位置との対応関係が保たれる。
In the first embodiment, the address for reading the
次に、画像の投射位置に対してオフセットが与えられた場合について、図9を用いて説明する。プロジェクタ装置1の使用に際して、必ずしも0°姿勢(投射角0°)が投射位置の最下端になるとは限らない。例えば図9に例示されるように、所定の投射角θofstによる投射位置Pos3を、最下端の投射位置にする場合も考えられる。この場合、画像データ1413による画像1313は、オフセットが与えられない場合に比べて、投射角θofstに対応する高さだけ上にずれた位置に投射されることになる。この、画像データ140の最下端のラインを最下端とする画像を投射する際の投射角θを、オフセットによるオフセット角θofstとする。
Next, the case where an offset is given to the projection position of an image will be described with reference to FIG. When the
この場合、例えば、このオフセット角θofstを投射角0°と見做して、メモリ101に対する切り出し領域を指定することが考えられる。上述した式(3)および式(4)に当て嵌めると、下記の式(7)および式(8)のようになる。なお、式(7)および式(8)における各変数の意味は、上述の式(3)および式(4)と共通である。
RS=(θ−θofst)×(ln/α)+S …(7)
RL=(θ−θofst)×(ln/α)+S+ln …(8)
In this case, for example, it can be considered that the offset angle θ ofst is regarded as a projection angle of 0 °, and a cutout region for the
R S = (θ−θ ofst ) × (ln / α) + S (7)
R L = (θ−θ ofst ) × (ln / α) + S + ln (8)
ところで、上述した式(3)および式(4)による切り出し領域の指定方法は、投射レンズ12による投射を行う投射面130が、ドラム部10の回転軸36を中心とした円筒であると仮定した、円筒モデルに基づくものである。しかしながら、実際には、投射面130は、投射角θ=0°に対して90°の角をなす垂直な面(以下、単に「垂直な面」と呼ぶ)であることが多いと考えられる。画像データ140から同一のライン数の画像データを切り出して垂直な面に投射した場合、投射角θが大きくなるに連れ、垂直な面に投射される画像が縦方向に伸びることになる。そこで画像切り出し部100の後に画像処理部102において次のような画像処理を施す。
By the way, the method for specifying the cut-out area according to the above-described formulas (3) and (4) assumes that the
図10および図11を用いて、垂直な面に対して投射される画像について説明する。図10において、位置Bをドラム部10の回転軸36の位置として、位置Bから距離rだけ離れた投射面Wに、投射レンズ12から画像を投射する場合について考える。
An image projected on a vertical plane will be described with reference to FIGS. 10 and 11. In FIG. 10, consider a case where an image is projected from the
上述の円筒モデルでは、位置Bを中心とする半径rの弧Cを投射面として投射画像が投射される。弧Cの各点は、位置Bから等距離であり、投射レンズ12から投射される光の光束中心は、弧Cを含む円の半径となる。したがって、投射角θを0°のθ0からθ1、θ2、…と増加させても、投射画像は常に同じサイズで投射面に対して投射される。
In the above-described cylindrical model, a projection image is projected with an arc C having a radius r centered on the position B as a projection plane. Each point of the arc C is equidistant from the position B, and the light flux center of the light projected from the
一方、垂直な面である投射面Wに対して投射レンズ12から画像を投射する場合、投射角θをθ0からθ1、θ2、…と増加させると、投射レンズ12から投射された光の光束中心が投射面Wに照射される位置が、正接関数の特性に従い角度θの関数にて変化する。したがって、投射画像は、投射角θが大きくなるに連れ、下記の式(9)に示される比率Mに従い、上方向に伸びる。
M=(180×tanθ)/(θ×π) …(9)
On the other hand, when an image is projected from the
M = (180 × tan θ) / (θ × π) (9)
式(9)によれば、例えば投射角θ=45°の場合、約1.27倍の比率で投射画像が伸びることになる。また、投射面Wが半径rの長さに対してさらに高く、投射角θ=60°での投射が可能である場合、投射角θ=60°においては、約1.65倍の比率で投射画像が伸びることになる。 According to Expression (9), for example, when the projection angle θ = 45 °, the projection image is stretched at a ratio of about 1.27 times. In addition, when the projection surface W is higher than the length of the radius r and projection at the projection angle θ = 60 ° is possible, the projection is performed at a ratio of about 1.65 times at the projection angle θ = 60 °. The image will stretch.
また、投射面W上の投射画像におけるライン間隔も、図11に例示されるように、投射角θが大きくなるに連れ広くなる。この場合、1つの投射画像内における投射面W上の位置に応じて、上述の式(9)に従いライン間隔が広くなることになる。 In addition, the line interval in the projected image on the projection surface W also increases as the projection angle θ increases, as illustrated in FIG. In this case, according to the position on the projection surface W in one projection image, the line interval is widened according to the above equation (9).
そこで、プロジェクタ装置1は、投射レンズ12の投射角θに従って、上述の式(9)の逆数の比率で、投射を行う画像の画像データに対して縮小処理を行う。この縮小処理は、円筒モデルに基づいて切り取る画像データよりも大き目が望ましい。即ち、垂直な面である投射面Wの高さに依存するが、投射角θ=45°の場合、約1.27倍の比率で投射画像が伸びるので、その逆数の約78%程度に縮めることになる。そこで画像メモリを一杯に使い切るには、予め、22%程度以上、ライン数を多めに切り取っておき、投射される画像に対応する画像データの領域よりも大きい領域を切り出し領域の画像として読み込んでおいて画像処理部102に入力することが望ましい。
Therefore, the
一例として、画像制御部103は、プロジェクタ装置1に入力された画像データを画像切り出し部100によりメモリ101に格納する際に、当該画像データに対して、上述の式(9)の逆数の比率を用いて、画像データが投射される際の画像のライン毎に、当該画像データに対して予め縮小処理を施す。縮小処理は、投射角θに依存した縮小率で、ライン(垂直方向の画素)に対して数タップのローパスフィルタをかけて、ラインを間引く。正確には、ローパスフィルタの帯域の制限値も投射角θに依存して変更する必要がある。このとき、最大の投射角θに対応する縮小率で均一にフィルタの特性を決定する、最大の投射角θの、ほぼ1/2に対応する縮小率で均一にフィルタの特性を決定する、などの一般的な線形補間を利用することができる。また、そのフィルタ処理の後、間引くラインにおいて、画面内の投射角θに依存してサブサンプリングを行う必要がある。ここでも、最大の投射角θに対応する縮小率での均一に間引きを行う、最大の投射角θの、ほぼ1/2に対応する縮小率で均一に間引きを行う、などの処理を行うこともできる。ローパスフィルタ処理や間引き処理をより正確に行う場合には、幾つかのエリアに分割して、エリア毎に均一に処理を行うことで、よりよい特性を得ることが可能である。
As an example, when the
なお、この式(9)を利用した画像処理は、メモリ101に画像データを格納する際に行う例に限られない。この画像処理は、例えば画像処理部102で行ってもよい。
Note that the image processing using the formula (9) is not limited to an example performed when image data is stored in the
また、実際にプロジェクタ装置1が使用される環境では、投射面Wの高さに制限があり、ある高さの位置Aで90°折り返して面Rが形成される場合が多いと考えられる。この面Rも、プロジェクタ装置1の投射面として用いることができる。この場合、投射面Rに投射される画像は、投射角θをさらに大きくして、投射位置が位置Aを越えて真上方向(投射角θ=90°)に向かうのに連れて、上述した投射面Wに投射される画像とは逆の特性で縮むことになる。
Further, in an environment where the
そのため、画像データによる画像を投射角0°および90°で投射する場合は、投射する画像データに対する式(9)を用いた縮小処理を行わないようにする。また、投射面Wの長さ(高さ)と、投射面Rの長さとが略等しい場合には、投射する画像データに対する式(9)を用いた縮小処理を、投射角0°から投射面Wの最上部の位置Aまでの縮小処理と、位置Aから投射角90°までの縮小処理とで対称の処理として実行する。これにより、画像制御部103におけるこの縮小処理に対する負荷を低減することができる。
Therefore, when an image based on image data is projected at the projection angles of 0 ° and 90 °, the reduction process using Expression (9) is not performed on the projected image data. In addition, when the length (height) of the projection surface W and the length of the projection surface R are substantially equal, the reduction process using the formula (9) for the image data to be projected is performed from the
上述の例では、投射角θ=0°に対して90°の角をなす垂直な面を想定して説明を行った。ドラム部10の回転角によっては、投射角θ=0°に対して180°の角をなす平面に投射することも考えられる。画像データ140から同一のライン数の画像データを切り出してこの面に投射した場合、投射角θが大きくなるに連れ、投射される画像が縦方向に縮むことになる。そこで画像切り出し部100の後に、画像処理部102において上述の説明とは逆の画像処理を施す。
In the above-described example, the description has been made on the assumption that a vertical surface forms an angle of 90 ° with respect to the projection angle θ = 0 °. Depending on the rotation angle of the
すなわち、投射角θをθ0からθ1、θ2、…と増加させると、投射レンズ12から投射面までの距離が小さくなるよう変化する。そこで、プロジェクタ装置1は、投射レンズ12の投射角θに従って、上述した説明とは逆に、投射を行う画像の画像データに対して拡大処理を行うようにする。
That is, when the projection angle θ is increased from θ 0 to θ 1 , θ 2 ,..., The distance from the
以上のように、画像投射装置1の画像切り出し部は、投射方向が第1の投射方向から第2の投射方向に変化するにつれて、投射部12から投射面までの距離が小さくなる場合には、切り出し画像データの画素毎に、投射角θに基づいた拡大処理を施すようにしてもよい。
As described above, when the distance from the
なお、以下では、特に記載のない限り、角度の記述は円筒モデルに基づくものとし、垂直面に対する投射の場合など、必要に応じて適宜、式(9)に基づく補正が行われるものとする。 In the following description, unless otherwise specified, the description of angles is based on a cylindrical model, and correction based on Expression (9) is appropriately performed as necessary, such as in the case of projection on a vertical plane.
<メモリ制御について>
次に、図12〜図15を用いて、メモリ101のアクセス制御について説明する。画像データは、垂直同期信号VD毎に、画面上水平方向に各ライン毎に画像の左端から右端に向けて各画素が順次伝送され、各ラインは、画像の上端から下端に向けて順次伝送される。なお、以下では、画像データは、デジタルハイビジョン規格に対応した、水平1920画素×垂直1080画素(ライン)のサイズをもつ場合を例として説明する。
<About memory control>
Next, access control of the
以下では、メモリ101が、それぞれ独立してアクセス制御が可能な、4つのメモリ領域101Y1、101Y2、101T1および101T2を含む場合のアクセス制御の例について説明する。すなわち、図12に示されるように、メモリ101は、それぞれ水平1920画素×垂直1080画素(ライン)のサイズで画像データの書き込み・読み出しに用いられるメモリ領域101Y1および101Y2と、それぞれ水平1080画素×垂直画素1920(ライン)のサイズで画像データの書き込み・読み出しに用いられるメモリ領域101T1および101T2とがそれぞれ設けられている。以下、各メモリ領域101Y1、101Y2、101T1および101T2を、それぞれメモリ領域Y1、メモリ領域Y2、メモリ領域T1およびメモリ領域T2として説明する。
Hereinafter, an example of access control in the case where the
図13は、画像切り出し部100によるメモリ101に対するアクセス制御を説明するためのタイムチャートの一例である。図13(a)は、投射レンズ12の投射角θ、図13(b)は、垂直同期信号VDを示す。また、図13(c)は、画像切り出し部100に入力される画像データD1、D2、…の入力タイミング、図13(d)〜図13(g)は、それぞれメモリ領域Y1、T1、Y2およびT2に対する画像切り出し部100からのアクセスの例を示す。なお、図13(d)〜図13(g)において、「R」が付されているブロックは、読み出しを示し、「W」が付されているブロックは、書き込みを示す。
FIG. 13 is an example of a time chart for explaining access control to the
画像切り出し部100に対して、垂直同期信号VD毎に、それぞれ1920画素×1080ラインの画像サイズを持つ画像データD1、D2、D3、D4、D5、D6、…が入力される。各画像データD1、D2、…は、垂直同期信号VDに同期して、垂直同期信号VDの後から入力される。また、各垂直同期信号VDに対応する投射レンズ12の投射角を、それぞれ投射角θ1、θ2、θ3、θ4、θ5、θ6、…とする。投射角θは、このように垂直同期信号VD毎に取得される。
Image data D 1 , D 2 , D 3 , D 4 , D 5 , D 6 ,... Each having an image size of 1920 pixels × 1080 lines is input to the
先ず、画像切り出し部100に対して、画像データD1が入力される。第1の実施形態によるプロジェクタ装置1は、上述したように、ドラム部10を回転させることで投射レンズ12による投射角θを変化させて投射画像の投射位置を移動させると共に、投射角θに応じて画像データに対する読み出し位置を指定する。そのため、画像データは、垂直方向により長いと都合がよい。一般的には、画像データは、水平方向のサイズが垂直方向のサイズよりも大きいことが多い。そこで例えば、ユーザがカメラを90°回転させて撮像を行い、この撮像で得られた画像データをプロジェクタ装置1に入力することが考えられる。
First, image data D 1 is input to the
すなわち、画像切り出し部100に入力される画像データD1、D2、…による画像は、図14(a)にイメージとして示される画像160のように、画像の内容から判断して正しい向きの画像から90°回転された、横向きの画像とされている。
That is, the image by the image data D 1 , D 2 ,... Input to the
画像切り出し部100は、入力された画像データD1を、先ず、メモリ領域Y1に対して、画像データD1の入力タイミングに対応したタイミングWD1で書き込む(図13(d)のタイミングWD1)。画像切り出し部100は、画像データD1を、図14(b)の左側に示されるように、水平方向に向けてライン順にメモリ領域Y1に対して書き込む。図14(b)の右側に、こうしてメモリ領域Y1に書き込まれた画像データD1による画像161をイメージとして示す。画像データD1は、入力時の画像160と同じイメージの画像161として、メモリ領域Y1に書き込まれる。
The
画像切り出し部100は、図14(c)に示されるように、メモリ領域Y1に書き込んだ画像データD1を、当該画像データD1を書き込んだ垂直同期信号VDの次の垂直同期信号VDの開始と同時のタイミングRD1で、メモリ領域Y1から読み出す(図13(d)のタイミングRD1)。
As shown in FIG. 14C, the
このとき、画像切り出し部100は、画像データD1を、画像の左下隅の画素を読み出し開始画素として、垂直方向に順次ラインを跨いで画素毎に読み出していく。画像の上端の画素を読み出すと、次は、垂直方向の読み出し開始位置の画素の右隣の画素を読み出し開始画素として、垂直方向に各画素を読み出す。この動作を、画像の右上隅の画素の読み出しが終了するまで、繰り返す。
At this time, the
換言すれば、画像切り出し部100は、ライン方向を画像の下端から上端に向けた垂直方向として、メモリ領域Y1からの画像データD1の読み出しを、当該垂直方向のライン毎に、画像の左端から右端に向けて画素毎に順次読み出す。
In other words, the
画像切り出し部100は、このようにしてメモリ領域Y1から読み出した画像データD1の画素を、図15(a)の左側に示されるように、メモリ領域T1に対して、ライン方向に向けて画素毎に順次書き込んでいく(図13(e)のタイミングWD1)。すなわち、画像切り出し部100は、メモリ領域Y1から例えば1画素を読み出す毎に、読み出したこの1画素をメモリ領域T1に書き込む。
The
図15(a)の右側は、こうしてメモリ領域T1に書き込まれた画像データD1による画像162のイメージを示す。画像データD1は、水平1080画素×垂直1920画素(ライン)のサイズとしてメモリ領域T1に書き込まれ、入力時の画像160が時計回りに90°回転されて水平方向と垂直方向とが入れ替えられた画像162とされる。
The right side of FIG. 15A shows the
画像切り出し部100は、メモリ領域T1に対して画像制御部103に指定された切り出し領域のアドレス指定を行い、当該切り出し領域として指定された領域の画像データをメモリ領域T1から読み出す。この読み出しのタイミングは、図13(e)にタイミングRD1として示されるように、画像データD1が画像切り出し部100に入力されたタイミングに対して、2垂直同期信号VDの分だけ遅延することになる。
The
第1の実施形態によるプロジェクタ装置1は、上述したように、ドラム部10を回転させることで投射レンズ12による投射角θを変化させて投射画像の投射位置を移動させると共に、投射角θに応じて画像データに対する読み出し位置を指定する。例えば、画像データD1が、投射角θ1のタイミングで画像切り出し部100に入力される。この画像データD1による画像を実際に投射するタイミングにおける投射角θは、投射角θ1から、投射角θ1と異なる投射角θ3に変化していることが有り得る。
As described above, the
そのため、メモリ領域T1から画像データD1を読み出す際の切り出し領域は、この投射角θの変化分を見込んで、投射される画像に対応する画像データの領域よりも大きい範囲で読み出すようにする。 Therefore, cut-out area for reading image data D 1 from the memory area T 1 is expected to change in the projection angle theta, to read out at a range greater than the area of the image data corresponding to an image to be projected .
図15(b)を用いてより具体的に説明する。図15(b)の左側は、メモリ領域T1に格納される画像データD1による画像163のイメージを示す。この画像163において、実際に投射される領域を投射領域163aとし、他の領域163bは、非投射領域であるとする。この場合、画像制御部103は、メモリ領域T1に対して、投射領域163aの画像に対応する画像データの領域よりも、少なくとも、2垂直同期信号VDの期間で投射レンズ12による投射角θが最大に変化した場合の変化分に相当するライン数分大きい切り出し領域170を指定する。
This will be described more specifically with reference to FIG. The left side of FIG. 15B shows an image of the
画像切り出し部100は、画像データD1をメモリ領域T1に書き込んだ垂直同期信号VDの次の垂直同期信号VDのタイミングで、この切り出し領域170からの画像データの読み出しを行う。こうして、投射角θ3のタイミングで、投射を行う画像データがメモリ領域T1から読み出され、後段の画像処理部102を経て表示素子114に供給され、投射レンズ12から投射される。
The
画像切り出し部100に対し、画像データD1が入力された垂直同期信号VDの次の垂直同期信号VDのタイミングで、画像データD2が入力される。このタイミングでは、メモリ領域Y1は画像データD1が書き込まれている。そのため、画像切り出し部100は、画像データD2をメモリ領域Y2に書き込む(図13(f)のタイミングWD2)。このときの、画像データD2のメモリ領域Y2への書き込み順は、上述の画像データD1のメモリ領域Y1への書き込み順と同様であり、イメージも同様である(図14(b)参照)。
Image data D 2 is input to the
すなわち、画像切り出し部100は、画像データD2を、画像の左下隅の画素を読み出し開始画素として、垂直方向に順次ラインを跨いで画素毎に画像の上端の画素まで読み出し、次に垂直方向の読み出し開始位置の画素の右隣の画素を読み出し開始画素として、垂直方向に各画素を読み出す(図13(f)のタイミングRD2)。この動作を、画像の右上隅の画素の読み出しが終了するまで、繰り返す。画像切り出し部100は、このようにしてメモリ領域Y2から読み出した画像データD2の画素を、メモリ領域T2に対して、ライン方向に向けて画素毎に順次書き込んで(図13(g)のタイミングWD2)いく(図15(a)左側参照)。
That is, the
画像切り出し部100は、メモリ領域T2に対して画像制御部103に指定された切り出し領域のアドレス指定を行い、当該切り出し領域として指定された領域の画像データを、図13(g)のタイミングRD2でメモリ領域T2から読み出す。このとき、上述したように、画像制御部103は、メモリ領域T2に対して、投射角θの変化分を見込んだ、投射される画像に対応する画像データの領域よりも大きい領域を切り出し領域170として指定する。
The
画像切り出し部100は、画像データD2をメモリ領域T2に書き込んだ垂直同期信号VDの次の垂直同期信号VDのタイミングで、この切り出し領域170からの画像データの読み出しを行う。こうして、投射角θ2のタイミングで画像切り出し部100に入力された画像データD2における切り出し領域170の画像データが、投射角θ4のタイミングでメモリ領域T2から読み出され、後段の画像処理部102を経て表示素子114に供給され、投射レンズ12から投射される。
The
以降、同様にして、画像データD3、D4、D5、…に対して、メモリ領域Y1およびT1の組と、メモリ領域Y2およびT2の組とを交互に用いて順次処理していく。 Thereafter, in the same manner, the image data D 3 , D 4 , D 5 ,... Are sequentially processed by alternately using the set of memory areas Y 1 and T 1 and the set of memory areas Y 2 and T 2. I will do it.
上述のように、第1の実施形態では、メモリ101に対して、水平1920画素×垂直1080画素(ライン)のサイズで画像データの書き込み読み出しに用いられるメモリ領域Y1、Y2の領域と、水平1080画素×垂直1920(画素ライン)のサイズで画像データの書き込み読み出しに用いられるメモリ領域T1、T2の領域とをそれぞれ設けている。これは、一般に、画像メモリに用いられるDRAM(Dynamic Random Access Memory)は、水平方向のアクセスに対して、垂直方向のアクセスの方がアクセス速度が遅いためである。他の、水平方向と垂直方向とで同等のアクセス速度を得られる、ランダムアクセス容易なメモリを用いる場合、画像データに応じた容量のメモリを2面用いる構成としてもよい。
As described above, in the first embodiment, the memory areas Y 1 and Y 2 used for writing and reading image data with a size of horizontal 1920 pixels × vertical 1080 pixels (lines) with respect to the
<画像データの投射を行う処理の流れ>
次に、図16のフローチャートを用いてプロジェクタ装置1において画像データによる画像を投射する際の処理の流れについて説明する。
<Flow of processing for projecting image data>
Next, the flow of processing when projecting an image based on image data in the
ステップS100で、画像データの入力に伴い、当該画像データによる画像の投射に係る各種設定値がプロジェクタ装置1に入力される。入力された各種設定値は、例えばCPU120に取得される。ここで取得される各種設定値は、例えば、画像データによる画像を回転させるか否か、すなわち、当該画像の水平方向と垂直方向とを入れ替えるか否かを示す値、画像の拡大率、投射の際のオフセット角θofstを含む。各種設定値は、プロジェクタ装置1に対する画像データの入力に伴い、データとしてプロジェクタ装置1に入力してもよいし、操作部14を操作することで入力してもよい。
In step S100, along with the input of the image data, various setting values relating to the projection of the image based on the image data are input to the
次のステップS101で、プロジェクタ装置1に対して、1フレーム分の画像データが入力され、画像切り出し部100により、入力された画像データが取得される。取得された画像データは、メモリ101に書き込まれる。
In the next step S <b> 101, image data for one frame is input to the
次のステップS102で、画像制御部103は、オフセット角θofstを取得する。次のステップS103で、画像制御部103は、切り出しサイズすなわち入力された画像データにおける切り出し領域のサイズを取得する。画像制御部103は、切り出し領域のサイズを、ステップS100で取得された設定値から取得してもよいし、操作部14に対する操作に応じて取得してもよい。次のステップS104で、画像制御部103は、投射レンズ12の画角αを取得する。画像制御部103は、投射レンズ12の画角αを、例えば画角制御部106から取得する。さらに、次のステップS105で、画像制御部103は、投射レンズ12の投射角θを、例えば回転制御部104から取得する。
In the next step S102, the
次のステップS106で、画像制御部103は、ステップS102〜ステップS105で取得されたオフセット角θofstと、切り出し領域のサイズと、画角αと、投射角θとに基づき、上述した式(3)〜式(8)を用いて、入力された画像データに対する切り出し領域を求める。画像制御部103は、画像切り出し部100に対して、求めた切り出し領域からの画像データの読み出しを指示する。画像切り出し部100は、画像制御部103からの指示に従い、メモリ101に記憶される画像データから切り出し領域内の画像データを読み出し、画像データの切り出しを行う。画像切り出し部100は、メモリ101から読み出した切り出し領域の画像データを画像処理部102に供給する。
In the next step S106, the
ステップS107で、画像処理部102は、画像切り出し部100から供給された画像データに対して、例えば上述した式(1)および式(2)に従いサイズ変換処理を施す。画像処理部102でサイズ変換処理を施された画像データは、表示素子114に供給される。表示素子114は、光源111からの光を画像データに従い変調して射出する。射出されたこの光は、投射レンズ12から投射される。
In step S107, the
次のステップS108で、CPU120は、上述のステップS101で入力された画像データの次のフレームの画像データの入力があるか否かを判定する。若し、次のフレームの画像データの入力があると判定された場合、CPU120は、処理をステップS101に戻し、当該次のフレームの画像データに対して上述したステップS101〜ステップS107の処理を行う。すなわち、このステップS101〜ステップS107の処理は、例えば画像データの垂直同期信号VDに従い、画像データのフレーム単位で繰り返される。したがって、プロジェクタ装置1は、投射角θの変化に対して、フレーム単位で各処理を追随させることができる。
In the next step S108, the
一方、ステップS108で、次のフレームの画像データが入力されないと判定した場合、CPU120は、プロジェクタ装置1における画像の投射動作を停止させる。例えば、CPU120は、光源111をオフにするように制御すると共に、回転機構部105に対してドラム部10の姿勢を初期姿勢に戻すように命令を出す。そして、CPU120は、ドラム部10の姿勢が初期姿勢に戻った後、光源111などを冷却するファンを停止させる。
On the other hand, if it is determined in step S108 that the image data of the next frame is not input, the
以上の通り、プロジェクタ装置1によれば、画像データの有する解像度を保持しながら、ユーザが、入力された画像データに係る画像における投射された被写体画像の位置を把握しやすい画像投射を行うことができる。
As described above, according to the
<投射画像の高品位化(1)>
次に、第1の実施形態に係る投射画像を高品位化する第1の方法について説明する。上述したプロジェクタ装置1の制御によれば、メモリ101に格納される画像データから投射のための投射画像データを切り出す切り出し領域を、投射角θに応じて変更している。そのため、図17(a)〜図17(c)に例示されるように、被投射媒体に投射される投射画像を、投射角θに応じて入力画像データ200中で移動させ、入力画像データ200の全ての領域を投射させることができる。
<High-quality projection image (1)>
Next, a first method for improving the quality of the projection image according to the first embodiment will be described. According to the control of the
すなわち、図17(a)に示されるように、例えば投射角0°の状態において、メモリ101に対して、入力画像データ200の下端を含む切り出し領域201aが指定され、当該切り出し領域201a内の画像データが投射画像データとして読み出され投射される。投射角θを増加させると、図17(b)に示されるように、切り出し領域201aに対して、投射角θの増加分に対応する高さyだけ移動させた切り出し領域201bがメモリ101に対して指定され、切り出し領域201b内の画像データが投射画像データとして読み出される。さらに投射角θを増加させた場合についても同様に、図17(c)に示されるように、メモリ101に対して、切り出し領域201bに対して投射角θの増加分に対応する高さyだけ移動させて指定された切り出し領域201cから投射画像データが読み出され、投射される。
That is, as shown in FIG. 17A, for example, in a state where the projection angle is 0 °, a
ところで、上述したように、メモリ101上で指定された切り出し領域に係る画像データの読み出しは、垂直同期信号VDに同期して行われ、表示素子114の表示は、垂直同期信号VDのタイミング毎に更新される。ここで、投射角θがある程度高速に変化した場合について、図18を参照しながら説明する。
By the way, as described above, the reading of the image data related to the cutout area designated on the
当初、例えば投射角0°の状態において、図18(a)に示されるように、メモリ101に対して指定された切り出し領域201a内の画像データが、垂直同期信号VDに基づき投射画像データとして読み出され投射されたものとする。この状態から投射角θを変化させると、t1時間後には、被投射媒体上の投射位置が投射角θの変化分Δθ1に応じた高さz1だけ移動する。この様子を図18(b)に示す。
Initially, for example, in a state where the projection angle is 0 °, as shown in FIG. 18A, the image data in the
この図18(b)の状態において、t1時間がフレーム周期よりも短い場合、メモリ101に対する切り出し領域201aの変更、ならびに、表示素子114における表示の更新は行われず、投射レンズ12による投射方向のみが変化する。そのため、投射画像は、投射角0°の時点で切り出し領域201aから読み出された投射画像データが投射角θの変化分Δθ1に対応する高さz1だけ移動したものとなる。例えば、投射角0°の時点で指定された切り出し領域201aが入力画像データ200の下端部を含む場合、この下端部を含む投射画像がそのまま、投射角θの高さz1だけ持ち上がって投射されることになる。
In the state of FIG. 18B, when t 1 time is shorter than the frame period, the
次に、図18(b)の状態からさらにt2時間、投射角θを変化させ続け、図18(a)の状態から1フレーム周期が経過したものとする。このとき、投射レンズ12による投射位置は、投射角θの変化分Δθ2に応じて、図18(b)の位置からさらに高さz2だけ移動するものとする。この場合、図18(c)に示されるように、投射画像データを切り出す切り出し領域が、図18(a)の時点で指定された切り出し領域201aから、投射角θの増加分(Δθ1+Δθ2)だけ移動した切り出し領域201cに変更される。
Next, it is assumed that the projection angle θ is continuously changed for t 2 hours from the state of FIG. 18B, and one frame period has elapsed from the state of FIG. At this time, the projection position by the
図18(a)〜図18(c)の状態を比較する。入力画像データ200全体による画像が投射されたと仮想した場合の仮想的な投射画像(仮想投射画像と呼ぶ)を考えた場合、図18(b)の状態は、図18(a)の状態に対して、仮想投射画像の投射位置が投射角θの変化に応じて持ち上がっている。一方、図18(c)の状態では、入力画像データ200内において切り出し領域が投射角θの変化に応じて移動しており(切り出し領域201c)、図18(a)の状態に対して仮想投射画像の投射位置は、変化していない。
18A to 18C will be compared. When a virtual projection image (referred to as a virtual projection image) when it is virtually assumed that an image of the entire
したがって、投射画像が図18(b)の状態から図18(c)の状態へと変化した場合、仮想投射画像の投射位置が最初すなわち図18(a)の投射位置に戻ることになる。そのため、この動作を繰り返すと、ユーザには、投射画像がフレーム周期で上下に振動しているように見えてしまう。 Therefore, when the projection image changes from the state of FIG. 18B to the state of FIG. 18C, the projection position of the virtual projection image returns to the initial position, that is, the projection position of FIG. Therefore, when this operation is repeated, the projection image appears to the user as if it is vibrating up and down at the frame period.
この投射画像がフレーム周期で上下に振動しているように見えてしまう現象は、投射角θの変化を低速にするほど軽減される。しかしながら、例え投射角θの変化を微速なものとしても、モータ40を駆動する駆動パルスに応じた投射角θの変化の分解能に基づく誤差に起因する振動が残ってしまう。微小な動きに対する人間の眼の検知能力が、大きな動きに対する検知能力よりも高いことを鑑みると、この誤差に起因する振動が数ライン程度の振動であっても、画像のブレとしてユーザに認識されてしまう可能性がある。
The phenomenon that the projected image appears to vibrate up and down in the frame period is reduced as the change in the projection angle θ is made slower. However, even if the change in the projection angle θ is slow, vibration due to an error based on the resolution of the change in the projection angle θ corresponding to the drive pulse for driving the
そこで、本発明に係る投射画像の高品位化の第1の方法では、投射角θの変化の分解能に対して制限を与えることで、上述したような、投射画像に対するユーザのブレの認識を抑制する。より具体的には、投射レンズ12の画角αと、表示素子114における有効領域の画素単位のサイズとに基づき、モータ40を駆動する駆動パルスによる投射角θの分解能を規定する。
Therefore, in the first method for improving the quality of the projected image according to the present invention, by restricting the resolution of the change in the projection angle θ, the above-described blurring of the user with respect to the projected image is suppressed. To do. More specifically, the resolution of the projection angle θ by the drive pulse for driving the
図19を用いてより具体的に説明する。図19は、投射レンズ12から投射画像220が投射される様子を模式的に示す。図19において、投射レンズ12は、画角αで投射画像220の投射を行う。
This will be described more specifically with reference to FIG. FIG. 19 schematically shows how the
表示素子114の最大の有効領域における垂直方向のサイズをライン数lnとした場合、投射レンズ12の画角αにおける1ライン当たりの角度は、角度(α/ln)で表される。図19の例では、投射レンズ12の中心から、例えば第nラインと第(n+1)ラインとを見込む角が角度(α/ln)となる。
When the vertical size in the maximum effective area of the
一方、モータ40は、1の駆動パルスで、予め定められた角度(ステップ角)の回転を行う。また、上述したように、モータ40の回転は、ウォームギア41、ウォームギア41による回転を伝達するギア42a、42bおよびギア43を含むギア群を介してギア35に伝達され、ドラム30が回転される。したがって、ドラム30も、モータ40に対する1の駆動パルスで所定の角度λだけ回転し、投射レンズ12の投射方向が当該角度λだけ変化する。したがって、角度λは、モータ40の回転制御における投射角θの変化の分解能である。この角度λは、モータ40のステップ角と、ギア35を含めたギア群のギア比により決まる値である。
On the other hand, the
投射画像高品位化の第1の方法では、上述した角度(α/ln)と角度λとの間の関係を、下記の式(10)のように定める。但し、角度λは0°を超える角度とする。
λ≦α/ln …(10)
In the first method for improving the quality of the projected image, the relationship between the angle (α / ln) and the angle λ is defined as in the following equation (10). However, the angle λ is an angle exceeding 0 °.
λ ≦ α / ln (10)
式(10)によれば、投射画像の、モータ40に対する駆動パルス毎の移動量が1ライン以下となる。そのため、投射レンズ12による投射角θを連続的に変化させた場合の、上述したような、投射画像に対するユーザのブレの認識を抑制することができ、投射画像の高画質化を図ることが可能となる。
According to Expression (10), the amount of movement of the projection image for each drive pulse with respect to the
なお、上述したように、プロジェクタ装置1の光学系は、光学ズーム機構を備えており、光学ズームにより画角αを変えて投射画像の大きさを拡大・縮小させることができる。光学ズームでは、画角αを、光学系における下限の角度(最小画角αMINとする)としたときに投射画像が最も小さくなり、投射レンズ12の画角における1ライン当たりの角度も最小となり、好ましい。
As described above, the optical system of the
したがって、角度λを、画角αが最小画角αMINである場合に上述の式(10)を満たす角度として決めると、1駆動パルス当たりの投射角θの変化は、光学ズームにより画角αを変えた場合に常に1ラインに当たりの角度以内となるため、投射画像の上下の振動を効率的に抑制し、上述したような、投射画像に対するユーザのブレの認識を抑制することができる。 Therefore, when the angle λ is determined as an angle satisfying the above-described equation (10) when the angle of view α is the minimum angle of view α MIN , the change in the projection angle θ per drive pulse is determined by the optical zoom. When the angle is changed, it is always within an angle per line, so that the vertical vibration of the projected image can be efficiently suppressed, and the above-described blurring of the user with respect to the projected image can be suppressed.
<投射画像の高品位化(2)>
次に、第1の実施形態に係る投射画像を高品位化する第2の方法について説明する。上述したように、第1の実施形態に係るプロジェクタ装置1では、メモリ101からの投射画像データの読み出しや、表示素子114の表示の更新は、垂直同期信号VD毎に、すなわちフレーム周期で行われる。
<High-quality projection image (2)>
Next, a second method for improving the quality of the projection image according to the first embodiment will be described. As described above, in the
一方、プロジェクタ装置1では、例えば投射角θを高速に変化させる場合、フレーム周期内に複数回の駆動パルスをモータ40に供給する必要がある。この場合、1フレーム周期内において、投射画像の更新が行われずに投射角θすなわち投射位置のみが段階的に変化することになる。そのため、次フレームの先頭で投射画像の更新が行われる際に、前フレームで段階的に変化した各投射位置の投射画像が残像としてユーザに観察されてしまう。
On the other hand, in the
図20を用いて、この残像現象について概略的に説明する。図20(a)は、垂直同期信号VDを示す。投射画像は、例えば垂直同期信号VDの立ち上がりエッジのタイミングで更新されるものとする。図20(b)は、モータ40の駆動パルスを示す。この例では、1フレーム周期内に4回、所定のパルス幅を有する駆動パルスpl11、pl12、pl13およびpl14を、各駆動パルスpl11〜pl14間の時間間隔を等しくしてモータ40に対して与えている。より具体的には、回転制御部104(図4参照)は、垂直同期信号VD1のタイミングで駆動パルスpl11を生成してモータ40に与え、以降、等間隔で(等しい時間間隔で)駆動パルスpl12、pl13、…を順次生成してモータ40に与える。
The afterimage phenomenon will be schematically described with reference to FIG. FIG. 20A shows the vertical synchronization signal VD. For example, the projection image is updated at the timing of the rising edge of the vertical synchronization signal VD. FIG. 20B shows drive pulses for the
図20(c)は、被投射媒体に投射画像が投射される様子を模式的に示し、図中の垂直方向の軸が投射位置hの高さを示す。なお、投射位置は、投射画像の下端を基準として示す。最初の垂直同期信号VD1のタイミングで更新された投射画像2301は、次の駆動パルスpl12まで同じ位置h0に投射され、当該駆動パルスpl12において投射角θが変化して投射位置が次の位置h1に移動される。以下同様に、投射画像2301は、次の駆動パルスpl13で投射位置が位置h1から位置h2へと移動され、次の駆動パルスpl14でさらに位置h3へと移動される。
FIG. 20C schematically shows a state in which the projection image is projected onto the projection medium, and the vertical axis in the figure indicates the height of the projection position h. In addition, a projection position is shown on the basis of the lower end of a projection image.
次の垂直同期信号VD2のタイミングで次のフレーム周期先頭の駆動パルスが生成される。そのため、投射画像2301が投射画像2302に更新されると共に、投射位置が位置h4へと移動される。
The drive pulse of the next frame period beginning is generated at the timing of the next vertical synchronizing signal VD 2. Therefore, the
図20(d)は、投射画像による残像画像を模式的に示す模式図である。図20(c)と同様に、図中の垂直方向の軸が投射位置hの高さを示す。図20(c)に示したように、投射画像2301は、投射位置が位置h0、h1、…と、駆動パルス毎に順次移動されている。さらに、垂直同期信号VD2のタイミングで投射画像2301から投射画像2302に更新されると共に、駆動パルスにより投射位置が位置h4へと移動される。そのため、垂直同期信号VD2にて更新される前の各位置h0〜h3の投射画像2301が投射画像2302に対して重なっていない部分aにおいて、ユーザに、各位置h0〜h3の投射画像2301による残像が観察される可能性がある。
FIG. 20D is a schematic diagram schematically showing an afterimage based on the projection image. As in FIG. 20C, the vertical axis in the figure indicates the height of the projection position h. As shown in FIG. 20C, the projection position of the
この場合、各駆動パルスpl11、pl12、…間の時間間隔が等間隔であり、各位置h0〜h3の投射画像2301がそれぞれ同程度にユーザに観察される。そのため、各位置h0〜h3の投射画像2301による残像画像の強度が略等しくなり、滲んだような画像となって残像が観察される可能性がある。
In this case, the time intervals between the drive pulses pl 11 , pl 12 ,... Are equal, and the
そこで、本発明に係る投射画像の高品位化の第2の方法では、フレーム周期内に駆動パルスを生成する際に、投射画像が更新されるタイミングと当該タイミングに隣接する駆動パルスとの間の時間間隔と、互いに隣接する駆動パルス間の時間間隔とのうち少なくとも一部が不均等になるようにする。これにより、1フレーム周期内で駆動パルスにより投射位置が変化する場合に、特定の投射位置の投射画像が他の投射位置の投射画像よりも長く投射されるようになり、当該特定の投射位置の投射画像がより長くユーザに観察される。そのため、各投射位置の投射画像による残像の強度が不均等になり、残像による画像の滲みが抑制される。 Therefore, in the second method for improving the quality of the projection image according to the present invention, when generating the drive pulse within the frame period, the timing between the timing at which the projection image is updated and the drive pulse adjacent to the timing is used. At least a part of the time interval and the time interval between the drive pulses adjacent to each other is made unequal. Thereby, when a projection position changes with a drive pulse within one frame period, a projection image of a specific projection position comes to be projected longer than projection images of other projection positions. The projected image is observed by the user for a longer time. For this reason, the intensity of the afterimages by the projection images at the respective projection positions becomes uneven, and blurring of the images due to the afterimages is suppressed.
図21は、投射画像高品位化の第2の方法によるモータ制御の一例を示す。図21において、図21(a)は垂直同期信号VD、図21(b)は駆動パルス、図21(c)は投射画像、図21(d)は残像画像をそれぞれ示す。図21の例は、図21(b)に示されるように、1フレーム周期内で4の駆動パルスpl21、pl22、pl23およびpl24を、1フレーム周期内に均等な間隔で4の駆動パルスを生成する場合に比べて1/2の間隔で生成した例である。より具体的には、回転制御部104は、最初の駆動パルスpl21を垂直同期信号VD1のタイミングで生成する。そして、他の駆動パルスpl22、pl23およびpl24を、垂直同期信号VD1によるフレーム周期の後半側に寄せて、1フレーム周期内に均等な間隔で4の駆動パルスを生成する場合に比べて1/2の間隔で生成している。
FIG. 21 shows an example of motor control by the second method for improving the quality of the projected image. 21A shows a vertical synchronization signal VD, FIG. 21B shows a drive pulse, FIG. 21C shows a projected image, and FIG. 21D shows an afterimage. In the example of FIG. 21, as shown in FIG. 21B, four drive pulses pl 21 , pl 22 , pl 23, and pl 24 within one frame period are divided into four at equal intervals within one frame period. In this example, the drive pulses are generated at an interval of ½ compared to the case of generating the drive pulses. More specifically, the
この場合、図21(c)に示されるように、投射画像2321は、垂直同期信号VD1のタイミングで更新されると共に、当該タイミングの駆動パルスpl21で位置h0に投射画像2321が投射される。投射画像2321は、次の駆動パルスpl22までの時間T1の間、位置h0に投射され続ける。そして、駆動パルスpl22で投射位置が位置h0から位置h1に移動され、駆動パルスpl22から時間T2の間に、駆動パルスpl23およびpl24により位置h1から位置h2および位置h3へと、順次、投射位置が移動される。そのため、垂直同期信号VD2にて更新される前の各位置h0〜h3の投射画像2321が投射画像2322に重なって観察される。また、投射画像2321と投射画像2322が重なっていない部分に注目すると、図21(d)の部分bにおける画像が投射画像2322の表示期間にも残像として観察される。
In this case, as shown in FIG. 21C, the
この場合、ユーザは、各位置h1〜h3の投射画像2321の合計観察時間(時間T2)よりも長い時間(時間T1)、位置h0の投射画像2321を観察することになる。したがって、残像画像としては、位置h0のものが主として観察され、他の位置h1〜h3のものは、極めて僅かしか観察されない。したがって、残像による画像の滲みをより効率的に抑制することができる。
In this case, the user, the projected
図22は、投射画像高品位化の第2の方法による駆動パルスの他の例を示す。図22(a)は、垂直同期信号VDを示す。図22(b)は、1フレーム周期内に2の駆動パルスpl31およびpl32を生成する例を示す。この場合、回転制御部104は、最初の垂直同期信号VDのタイミングの駆動パルスpl31を生成すると共に、フレーム周期の中間に駆動パルスpl32を生成する。最初の垂直同期信号VDのタイミングで更新された投射画像は、駆動パルスpl32に応じて投射位置が移動される。
FIG. 22 shows another example of the driving pulse by the second method for improving the quality of the projected image. FIG. 22A shows the vertical synchronization signal VD. FIG. 22B shows an example in which two drive pulses pl 31 and pl 32 are generated within one frame period. In this case, the
このとき、回転制御部104は、駆動パルスpl32を、フレーム周期の中央から後ろにずれたタイミングで生成し、フレーム周期の先頭から当該駆動パルスpl32までの間隔aと、当該駆動パルスpl32からフレーム周期の後端までの間隔bとを不均等にする。これにより、間隔aにおいて投射される投射画像が、間隔bにおいて投射される投射画像よりも長い時間、ユーザに観察されるため、残像による画像の滲みを抑制することができる。このように、1フレーム周期内に少なくとも2の駆動パルスが生成された場合に、投射画像高品位化の第2の方法を適用することができる。
At this time, the
図22(c)は、図21を用いて説明した、1フレーム周期内に4の駆動パルスを生成する場合において、垂直同期信号VDのタイミングの駆動パルスpl41以外の駆動パルスpl42〜pl44間の時間間隔をさらに短くした例である(間隔d)。すなわち、1フレーム周期に占める時間的な割合が、図21の時間T1よりも図22(c)の間隔cの方が大きい。そのため、図21の例に対して、さらに効率的に残像による画像の滲みを抑制することができる。 FIG. 22C illustrates the case where four drive pulses are generated within one frame period described with reference to FIG. 21, and the drive pulses pl 42 to pl 44 other than the drive pulse pl 41 at the timing of the vertical synchronization signal VD. This is an example in which the time interval is further shortened (interval d). That is, the time ratio in one frame period is larger in the interval c in FIG. 22C than in the time T 1 in FIG. Therefore, it is possible to more effectively suppress blurring of an image due to an afterimage as compared with the example of FIG.
なお、上述では、1フレーム周期の前半側において駆動パルス間の時間間隔を長く取っているが、これはこの例に限定されず、1フレーム周期の後半側で駆動パルス間の時間間隔を長くしても良い。また、1フレーム周期内に1つの駆動パルスを生成する場合も、投射画像の更新タイミングと駆動パルスとの間の時間間隔を不均等にしてもよい。より具体的には、駆動パルスを1/2フレーム周期の位置ではなく、投射画像の更新タイミングとの一致を含む近傍に配置する。これにより、残像による画像の滲みを抑制することができる。 In the above description, the time interval between the drive pulses is set longer in the first half of one frame cycle. However, this is not limited to this example, and the time interval between the drive pulses is increased in the second half of one frame cycle. May be. Also, when one drive pulse is generated within one frame period, the time interval between the update timing of the projected image and the drive pulse may be made unequal. More specifically, the drive pulse is arranged not in the position of the 1/2 frame period but in the vicinity including the coincidence with the update timing of the projection image. Thereby, the blur of the image by an afterimage can be suppressed.
<投射禁止期間の設定>
上述では、1フレーム周期内を通して投射画像の投射を行うように説明したが、これはこの例に限定されず、1フレーム周期内において、駆動パルスのタイミングに応じて投射画像の投射を行わせないようにする投射禁止期間を設定することができる。投射禁止期間は、1フレーム周期内において、投射画像が更新されるタイミングと当該タイミングに隣接する駆動パルスとの間の時間間隔、または、隣接する駆動パルス間の時間間隔が最も大きな期間を除いた期間に対して設定する。
<Setting of projection prohibition period>
In the above description, the projection image is projected through one frame period. However, this is not limited to this example, and the projection image is not projected according to the timing of the drive pulse within one frame period. It is possible to set a projection prohibition period. The projection prohibition period excludes the time interval between the timing at which the projection image is updated and the drive pulse adjacent to the timing or the time interval between the adjacent drive pulses is the largest within one frame period. Set for the period.
図23を用いて、この投射禁止期間について、より具体的に説明する。図23(a)は、垂直同期信号VDを示す。図23(b)は、駆動パルスを示す。ここでは、図21(b)と同様に、1フレーム周期内で4の駆動パルスpl21、pl22、pl23およびpl24を、1フレーム周期内に均等な間隔で4の駆動パルスを生成する場合に比べて1/2の時間間隔で生成している。 This projection prohibition period will be described more specifically with reference to FIG. FIG. 23A shows the vertical synchronization signal VD. FIG. 23B shows drive pulses. Here, as in FIG. 21B, four drive pulses pl 21 , pl 22 , pl 23, and pl 24 are generated at equal intervals within one frame period in one frame period. It is generated at a time interval of ½ compared to the case.
この図23(b)の例では、垂直同期信号VD1によるフレーム周期内において、駆動パルスpl21と駆動パルスpl22との時間間隔(時間T1)が、当該フレーム周期内で隣接する駆動パルス間の時間間隔が最も大きな期間となる。そのため、この期間を除く、駆動パルスpl22〜フレーム周期後端までの期間(時間T2)を、投射禁止期間に設定する。投射禁止期間は、例えば図23(c)に例示されるようなマスク信号を用いて指定することができる。図23(c)の例では、マスク信号は、ハイ(High)状態のマスク期間240により投射禁止期間を指定している。
In the example of FIG. 23B, the time interval (time T 1 ) between the drive pulse pl 21 and the drive pulse pl 22 in the frame period of the vertical synchronization signal VD 1 is adjacent to the drive pulse in the frame period. The time interval between them is the largest period. For this reason, the period from the drive pulse pl 22 to the rear end of the frame period (time T 2 ) excluding this period is set as the projection prohibited period. The projection prohibition period can be specified using a mask signal as exemplified in FIG. In the example of FIG. 23C, the mask signal designates the projection prohibition period by the
投射禁止期間において投射画像の投射を禁止する方法は、様々に考えられる。図24−1は、光源111の点灯を制御することで投射禁止期間に投射を行わせないようにしたプロジェクタ装置1Aの一例の構成を示す。なお、この図24−1、ならびに、後述の図24−2、図24−3および図24−4において、上述の図4と共通する部分については同一の符号を付し、詳細な説明を省略する。
There are various methods for prohibiting the projection of the projection image during the projection prohibition period. FIG. 24-1 shows an example of a configuration of a
図24−1において、回転制御部104は、タイミングジェネレータ107から供給される垂直同期信号VDに基づき駆動パルスを生成して回転機構部105に供給する。それと共に、回転制御部104は、生成した駆動パルスに基づきマスク信号を生成して、光源111に供給する。光源111は、マスク信号のマスク期間240に消灯し、マスク期間240以外の期間で点灯するように制御される。
In FIG. 24A, the
図24−2は、表示素子114の駆動のオン/オフを切り替えることで、投射禁止期間に投射を行わせないようにしたプロジェクタ装置1Bの一例の構成を示す。回転制御部104は、駆動パルスに応じて生成したマスク信号を、表示素子114を駆動する図示されない駆動回路に供給する。駆動回路は、例えば、マスク信号のマスク期間240において全画素を強制的に黒表示とするように表示素子114を駆動し、マスク期間240以外の期間では、画像処理部102から供給される画像データに従い表示素子114を駆動する。
FIG. 24-2 shows an example of a configuration of the
図24−3は、投射レンズ12に対してシャッタ115を設け、シャッタ115の開閉を切り替えることで投射禁止期間に投射を行わせないようにしたプロジェクタ装置1Cの一例の構成を示す。シャッタ115は、閉状態とすることで投射レンズ12から射出する光を遮断し、投射画像の投射を禁止する。シャッタ115は、機械的に光を遮断するメカニカルシャッタを用いてもよいし、液晶シャッタなど光の透過率や透過方向を制御することで光を遮断する方式を用いてもよい。
FIG. 24-3 shows an example of a configuration of a projector apparatus 1C in which a
回転制御部104は、駆動パルスに応じて生成したマスク信号を、シャッタ115を駆動する図示されないシャッタ駆動部に供給する。シャッタ駆動部は、例えばマスク信号のマスク期間240において閉状態とし、マスク期間240以外の期間では開状態となるようにシャッタ115を駆動する。
The
なお、シャッタ115は、投射レンズ12に対して設ける例に限られない。例えば、シャッタ115を光源111と表示素子114との間に設けてもよい。
The
図24−4は、画像処理部102において有効領域の全面が黒色の黒画像を挿入することで、投射禁止期間に投射を行わせないようにしたプロジェクタ装置1Dの一例の構成を示す。回転制御部104は、駆動パルスに応じて生成したマスク信号を、画像処理部102に供給する。
FIG. 24-4 illustrates an exemplary configuration of the
画像処理部102は、マスク信号のマスク期間240の開始点で黒画像を表示するための黒画像データを生成し、生成した黒画像データを画像切り出し部100から供給される画像データとすげ替えて、表示素子114の駆動回路に供給する。黒画像データは、予め作成して図示されないメモリに格納しておいてもよい。図示は省略するが、マスク信号は、表示素子114の駆動回路にも供給され、当該駆動回路は、マスク期間240の開始点で表示素子114の表示を更新して黒画像データによる表示を行う。
The
このように、1フレーム周期内において、投射画像が更新されるタイミングと当該タイミングに隣接する駆動パルスとの間の時間間隔、または、隣接する駆動パルス間の時間間隔が最も大きな期間を除いた期間における投射を行わせないようにすることで、残像の原因となる、例えば1フレーム周期内で当該フレーム先頭から投射される投射画像に対して位置の異なる投射画像の投射が行われず、残像の発生が防止される。
Thus, in one frame period, the time interval between the timing at which the projection image is updated and the drive pulse adjacent to the timing, or the period excluding the period in which the time interval between adjacent drive pulses is the largest By preventing the projection in
投射禁止期間は、1フレーム周期内の、投射画像が更新されるタイミングと当該タイミングに隣接する駆動パルスとの間の時間間隔のうちの一部、または、隣接する駆動パルス間の時間間隔が最も大きな期間を除いた期間のうちの一部であっても、残像の発生を軽減する効果を得ることができる。また、投射禁止期間を設けることによる輝度の低下を補償するために、例えば光源111に対して、投射期間内の光量を増加させる制御をさらに加えても良い。 The projection prohibition period is a part of the time interval between the timing at which the projection image is updated and the drive pulse adjacent to the timing within one frame period, or the time interval between adjacent drive pulses is the longest. Even in a part of the period excluding the large period, an effect of reducing the occurrence of afterimages can be obtained. In addition, in order to compensate for a decrease in luminance due to the provision of the projection prohibition period, for example, a control for increasing the amount of light in the projection period may be added to the light source 111.
<投射画像高品位化の第1の方法と第2の方法との組み合わせ>
なお、上述した投射画像高品位化の第1の方法と第2の方法は、組み合わせて用いることができる。例えば、第2の方法で説明した、図21(b)に示される各駆動パルスpl21、pl22、pl23およびpl24における投射レンズ12の投射方向の変化が、上述した式(10)に従って決定された角度λになるように、モータ40のステップ角と、ギア35を含めたギア群のギア比を決める。
<Combination of first method and second method for improving projection image quality>
The first method and the second method for improving the quality of the projected image described above can be used in combination. For example, the change in the projection direction of the
<第2の実施形態>
次に、第2の実施形態について説明する。上述の第1の実施形態では、ドラム部10が垂直方向に回動し、投射レンズ12による投射角に応じて投射領域を垂直方向に変化させているが、これはこの例に限定されない。第2の実施形態では、投射レンズ12による投射領域を水平方向に変化可能とする。
<Second Embodiment>
Next, a second embodiment will be described. In the first embodiment described above, the
図25は、第2の実施形態による画像投射装置(プロジェクタ装置)1’の外観の例を示す図である。なお、図25は、画像投射装置1’のカバーなどを取り去った状態を示し、上述した図1および図2と共通する部分には同一の符号を付して、詳細な説明を省略する。
FIG. 25 is a diagram illustrating an example of the appearance of an image projection apparatus (projector apparatus) 1 ′ according to the second embodiment. FIG. 25 shows a state in which the cover of the
プロジェクタ装置1’において、台座302に設けられたターンテーブル301に対して水平回転筐体300が取り付けられている。水平回転筐体300は、内部に投射レンズ12を備えるドラム30が、軸部38を中心に垂直方向に回動可能に取り付けられている。ターンテーブル301の回動に応じて水平回転筐体300が水平方向に回動し、それに伴い、投射レンズ12による投射方向が水平方向に変化するようになっている。
In the
図26は、台座302の外観の例を示す。台座302は、ターンテーブル301を備える。ターンテーブル301は、裏面側にギア304が取り付けられている。ターンテーブル301は、後述する駆動部313からギア304を介して伝達された回転により、軸303を中心に水平方向に回動するようになっている。また、台座302は、内部に回路部の各種基板や電源部などが設けられる。
FIG. 26 shows an example of the appearance of the
図27は、ターンテーブル301を裏面側から見た図である。駆動部313は、ギア304に回転を伝達し、ターンテーブル301を回動させる。より詳細には、駆動部313は、例えばステッピングモータであるモータ320を有すると共に、モータ320の回転軸により直接駆動されるウォームギア321と、ウォームギア321による回転を伝達するギア322と、ギア322から伝達された回転をターンテーブル301のギア304に伝達するギア323とを含むギア群を有する。このギア群によりモータ320の回転をギア304に伝達することで、ターンテーブル301をモータ320の回転に応じて回転させることができる。ターンテーブル301の回転速度は、モータ320の回転速度とギア群のギア比とにより決定される。
FIG. 27 is a view of the
ターンテーブル301に対して、突起312aおよび312bが設けられる。この突起312aおよび312bを、図示されないフォトインタラプタなどを用いて検知することで、基準の方向に対するターンテーブル301の方向を知ることができる。
以下では、投射レンズ12の投射方向が第1面に対して垂直方向を向いている場合に、投射レンズ12による水平方向の投射角を投射角0°とし、この投射角0°を初期値とする。投射レンズ12による投射角は、ターンテーブル301上面側から見た場合に時計回りで増加するものとする。
In the following, when the projection direction of the
なお、プロジェクタ装置1’の動作を制御するための構成、ならびに、投射レンズ12を含む光学系の構成は、上述した図4に示した回路部および光学エンジン部110と共通であるので、説明を省略する。ここで、第2の実施形態では、図4における回転機構部105は、図27を用いて説明した駆動部313、突起312aおよび312b、ならびに、図示されないフォトインタラプタを含むものとする。フォトインタラプタの出力は、図4の回転制御部104に供給される。また、駆動部313のモータ320は、図4の回転制御部104から供給される駆動パルスにより駆動される。
Note that the configuration for controlling the operation of the
第2の実施形態によるプロジェクタ装置1’の動作について、図4の構成を参照しながら概略的に説明する。以下では、ドラム30は、垂直方向の回動を行わないものとして説明する。
The operation of the
例えば所定の画像サイズに整形された画像データが、入力画像データとしてプロジェクタ装置1’に入力される。ここでは、入力画像データの画像サイズは、幅が表示素子114の幅よりも大きいものとする。この入力画像データは、画像切り出し部100を介してメモリ101に格納される。図28は、第2の実施形態による、メモリ101に格納される入力画像データ330と、画像制御部103の指定に応じて画像切り出し部100が入力画像データ330から切り出した投射画像データ331との関係の例を模式的に示す。
For example, image data shaped into a predetermined image size is input to the projector apparatus 1 'as input image data. Here, the image size of the input image data is assumed to be larger than the width of the
投射角0°において、画像制御部103は、回転制御部104から取得される投射角θの情報に従い、画像切り出し部100に対して、メモリ101に格納される入力画像データ330の切り出し領域331を指定する。例えば、投射角0°において、画像制御部103は、画像切り出し部100に対して入力画像データ330の左端から表示素子114の有効領域に応じた幅の画像領域331aを指定する。
At the projection angle of 0 °, the
画像切り出し部100は、メモリ101に格納される入力画像データ330から切り出し領域として指定された画像領域331aを切り出して、画像データとして出力する。この画像データは、画像処理部102を介して表示素子114を駆動する駆動回路に供給される。駆動回路は、供給された画像データに従い表示素子114を駆動する。これにより、壁やスクリーンといった被投射媒体に対して、画像領域331aの投射画像が投射される。
The
例えば操作部14に対するユーザ操作により投射角θの変更が指示されると、回転制御部104は、この指示に応じたCPU120からの命令に従い、モータ320を駆動する駆動パルスを生成し、回転機構部105に供給する。回転機構部105において、供給された駆動パルスによりモータ320が駆動されて、ターンテーブル301が駆動パルスに応じた角度だけ回転される。
For example, when a change of the projection angle θ is instructed by a user operation on the
駆動パルスは、回転制御部104から画像制御部103へも供給される。画像制御部103は、駆動パルスに応じて、メモリ101に格納される入力画像データ330に対して切り出し領域を指定する。ここでは、画像制御部103は、駆動パルスに応じた投射角θの変化に対応して、画像領域331aに対してx1画素分、水平方向に移動した画像領域331bを切り出し領域として指定する。
The drive pulse is also supplied from the
画像切り出し部100は、メモリ101に格納される入力画像データ330から画像領域331bを切り出して、画像データとして出力する。この画像データが、画像処理部102を介して表示素子114の駆動回路に供給され、表示素子114が駆動される。これにより、被投射媒体に対して、画像領域331bの投射画像が、画像領域331aの投射画像に対して投射角θの変化分移動した位置に投射される。
The
さらに投射角θの変更が指示されると、同様にして、回転制御部104の制御によりターンテーブル301が駆動パルスに応じた角度だけ回転され投射角θが変化される。それと共に、画像制御部103により、投射角θの変化に対応して、例えば画像領域331bに対してさらにx2画素分、水平方向に移動した画像領域331cが切り出し領域として指定される。この画像領域331cの画像データに基づく投射画像が被投射媒体に投射される。
Further, when an instruction to change the projection angle θ is given, similarly, the
このように、第2の実施形態のプロジェクタ装置1’によれば、幅が表示素子114の幅よりも大きい入力画像データ330を、入力画像データ330内の所定領域を水平方向に移動させながら、全て投射させることができる。
Thus, according to the
<投射画像の高品位化(1)の適用>
第2の実施形態に対して、上述した第1の実施形態における投射画像高品位化の第1の方法を適用させることができる。この場合、投射画像を切り出す切り出し領域が、ターンテーブル301の回転に伴い入力画像データ330に対して水平方向に移動する。そのため、投射レンズ12による投射角θを連続的に変化させた場合、水平方向に対して、上述したような投射角θの分解能に基づく誤差に起因するブレがユーザに認識されてしまう。そのため、上述した投射画像高品位化の第1の方法をこの第2の実施形態に適用することで、水平方向についての投射画像に対するユーザのブレの認識を抑制する。
<Application of high quality projection image (1)>
The first method for improving the quality of the projected image in the first embodiment described above can be applied to the second embodiment. In this case, the cutout area for cutting out the projected image moves in the horizontal direction with respect to the
ここで、上述した式(10)の画角αは、表示素子114において水平方向に最大の有効領域の画像を投射する際の、当該有効領域を投射レンズ12から水平方向に見込む角となる。
Here, the angle of view α of Expression (10) described above is an angle at which the effective area is projected from the
また、式(10)におけるライン数lnは、表示素子114の有効領域の水平方向のサイズとなる。すなわち、第2の実施形態では、表示素子114の有効領域の、水平方向の各画素列において、垂直方向の位置が対応する画素からなる画素列をラインと定義し、このラインの、表示素子114における水平方向に最大の有効領域内の数をライン数lnとする。
Further, the number of lines ln in the equation (10) is the horizontal size of the effective area of the
さらに、式(10)における角度λは、モータ320に対する1の駆動パルスで投射レンズ12の投射方向が水平方向に変化する角度となる。角度λは、上述と同様に、モータ320のステップ角と、ギア304を含めたギア群のギア比によって決まる値である。
Furthermore, the angle λ in Expression (10) is an angle at which the projection direction of the
このように定義された画角α、ライン数lnおよび角度λが上述した式(10)を満たす場合に、投射画像の、モータ320に対する駆動パルス毎の移動量が1ライン未満となる。そのため、投射レンズ12による投射角θを連続的に変化させた場合の、投射画像に対するユーザのブレの認識を抑制することができ、投射画像の高画質化を図ることが可能となる。
When the angle of view α, the number of lines ln, and the angle λ defined as described above satisfy the above-described Expression (10), the movement amount of the projection image for each drive pulse with respect to the
<投射画像の高品位化(2)の適用>
第2の実施形態に対して、上述した第1の実施形態における投射画像高品位化の第2の方法を適用させることができる。投射レンズ12の投射方向を水平方向に変化させた場合であっても、第1の実施形態の場合と同様に、フレーム周期内に駆動パルスをモータ320に供給する場合、1フレーム周期内において、投射画像の更新が行われずに投射位置のみが段階的に変化する。したがって、次フレームの先頭で投射画像の更新が行われる際に、前フレームで段階的に変化した各投射位置の投射画像が水平方向の残像としてユーザに観察されることになる。
<Application of high quality projection image (2)>
The second method for improving the quality of the projected image in the first embodiment described above can be applied to the second embodiment. Even when the projection direction of the
第2の実施形態においても、第1の実施形態と同様にして、フレーム周期内に駆動パルスを生成する際に、投射画像が更新されるタイミングと当該タイミングに隣接する駆動パルスとの間の時間間隔と、互いに隣接する駆動パルス間の時間間隔とのうち少なくとも一部が不均等になるようにすることで、各投射位置の投射画像による残像の強度が不均等になり、残像による画像の滲みを抑制することが可能である。 Also in the second embodiment, as in the first embodiment, when a drive pulse is generated within a frame period, a time between a timing at which a projection image is updated and a drive pulse adjacent to the timing is updated. By making at least a part of the interval and the time interval between the drive pulses adjacent to each other non-uniform, the intensity of the afterimage due to the projection image at each projection position becomes nonuniform, and the image blur due to the afterimage Can be suppressed.
また、その際に、第1の実施形態の場合と同様にして、1フレーム周期内において、投射画像が更新されるタイミングと当該タイミングに隣接する駆動パルスとの間の時間間隔、または、隣接する駆動パルス間の時間間隔が最も大きな期間を除いた期間に対して、駆動パルスのタイミングに応じて投射画像の投射を行わせないようにする投射禁止期間を設定することができる。これにより、残像の原因となる、例えば1フレーム周期内で当該フレーム先頭から投射される投射画像に対して位置の異なる投射画像の投射が行われず、残像の発生が防止される。 At that time, similarly to the case of the first embodiment, the time interval between the timing at which the projected image is updated and the drive pulse adjacent to the timing or adjacent to each other within one frame period. For periods other than the period in which the time interval between drive pulses is the largest, it is possible to set a projection prohibition period in which projection images are not projected according to the timing of the drive pulses. Thereby, for example, the projection image having a different position is not projected on the projection image projected from the head of the frame within one frame period, which is a cause of the afterimage, and the occurrence of the afterimage is prevented.
投射禁止期間において投射画像の投射を行わせないようにする方法は、図24−1〜図24−4を用いて説明した、光源111の点灯を制御する方法、表示素子114の駆動のオン/オフを切り替える方法、シャッタ115を用いる方法、黒画像を挿入する方法の何れも適用することができる。
The method of preventing the projection image from being projected during the projection prohibition period is the method of controlling the lighting of the light source 111 described with reference to FIGS. Any of a method of switching off, a method of using the
<投射画像高品位化の第1の方法と第2の方法との組み合わせ>
第2の実施形態においても、上述の第1の実施形態と同様に、投射画像高品位化の第1の方法と第2の方法を組み合わせて用いることができる。例えば、第2の方法で説明した、図21(b)に示される各駆動パルスpl21、pl22、pl23およびpl24における投射レンズ12の投射方向の変化が、上述した式(10)に従って決定された角度λになるように、モータ320のステップ角と、ギア304を含めたギア群のギア比を決める。
<Combination of first method and second method for improving projection image quality>
Also in the second embodiment, similarly to the above-described first embodiment, the first method and the second method for improving the quality of the projected image can be used in combination. For example, the change in the projection direction of the
1,1’ プロジェクタ装置
10 ドラム部
12 投射レンズ
14 操作部
20 基台
30 ドラム
32 駆動部
35,42a,42b,43,304,322,323 ギア
40,320 モータ
41,321 ウォームギア
50a,50b フォトリフレクタ
51a,51b フォトインタラプタ
100 画像切り出し部
101 メモリ
102 画像処理部
103 画像制御部
104 回転制御部
105 回転機構部
106 画角制御部
107 タイミングジェネレータ
110 光学エンジン部
114 表示素子
115 シャッタ
120 CPU
140 画像データ
300 水平回転筐体
301 ターンテーブル
302 台座
DESCRIPTION OF
140
Claims (9)
前記投射部による投射方向を第1の投射方向から第2の投射方向まで、駆動パルスに応じた所定角度毎に変更する投射方向変更部と、
前記第1の投射方向と、前記投射方向変更部が変更した投射方向との間の投射角を導出する投射角導出部と、
入力された入力画像データを記憶する記憶部と、
前記投射部が投射する前記画像データとして、前記画角および前記投射角に基づいて、前記記憶部に記憶された前記入力画像データの画像の一部の領域を切り出した切り出し画像データを所定周期のタイミングで生成する画像切り出し部と、
前記記憶部に記憶された前記入力画像データの画像を、前記投射部が前記第1の投射方向から前記第2の投射方向に亘って投射する場合に、前記所定周期内での、前記切り出し画像データ生成タイミング位置と隣接する位置との前記駆動パルス間の間隔と、互いに隣接する駆動パルス間の間隔とのうち少なくとも一部の間隔が不均等な間隔になるように前記駆動パルスを生成する生成部と
を有する
ことを特徴とする画像投射装置。 A projection unit that projects light at a predetermined angle of view by modulating light from a light source by a light modulation element based on image data;
A projection direction changing unit that changes the projection direction by the projection unit from the first projection direction to the second projection direction at a predetermined angle according to the drive pulse; and
A projection angle deriving unit for deriving a projection angle between the first projection direction and the projection direction changed by the projection direction changing unit;
A storage unit for storing input image data input;
As the image data projected by the projection unit, cut-out image data obtained by cutting out a partial region of the image of the input image data stored in the storage unit based on the angle of view and the projection angle is a predetermined cycle. An image cutout unit generated at timing;
When the projection unit projects the image of the input image data stored in the storage unit from the first projection direction to the second projection direction, the cut-out image within the predetermined period generating for generating a data generation timing position and spacing between the drive pulses to the adjacent position, the drive pulses such that at least a portion of the interval is unequal spacing among the spacing between the drive pulses that are adjacent to each other And an image projection device.
前記所定周期内での、前記切り出し画像データ生成タイミング位置と隣接する位置との前記駆動パルス間の間隔と、互いに隣接する駆動パルス間の間隔とのうち、最も長い間隔を
前記切り出し画像データ生成タイミング位置と隣接する位置に配置して生成する
ことを特徴とする請求項1に記載の画像投射装置。 The generator is
Wherein in a predetermined period within the cut-out image data generation timing position and the distance between the drive pulses to the adjacent position, among the spacing between adjacent drive pulses to each other, the longest distance the cut-out image data generation timing The image projection apparatus according to claim 1, wherein the image projection apparatus is generated by being arranged at a position adjacent to the position.
前記所定周期内で、2以上の前記駆動パルスを生成する
ことを特徴とする請求項2に記載の画像投射装置。 The generator is
The image projection apparatus according to claim 2, wherein two or more drive pulses are generated within the predetermined period .
前記制御部は、
前記所定周期内での、前記切り出し画像データ生成タイミング位置と隣接する位置との前記駆動パルス間の間隔と、互いに隣接する駆動パルス間の間隔とのうち、最も長い間隔の区間を除く区間の少なくとも一部の区間について、前記投射部による投射を行わせないようにする
ことを特徴とする請求項1から請求項3の何れか1項に記載の画像投射装置。 A control unit for preventing projection by the projection unit;
The controller is
Within the predetermined period, the interval between the drive pulses of the position adjacent to the cut-out image data generation timing position, of the spacing between adjacent drive pulses to each other, the sections except the section of the longest distance of at least The image projection apparatus according to claim 1, wherein projection by the projection unit is not performed for some sections .
前記光源を消灯させて前記投射部による光の投射を行わせないようにする
ことを特徴とする請求項4に記載の画像投射装置。 The controller is
The image projection apparatus according to claim 4, wherein the light source is turned off so that the projection unit does not project light.
前記光変調素子に対する前記画像データに基づく駆動を停止させて、前記投射部による光の投射を行わせないようにする
ことを特徴とする請求項4に記載の画像投射装置。 The controller is
The image projection apparatus according to claim 4, wherein driving based on the image data with respect to the light modulation element is stopped so that light is not projected by the projection unit.
前記制御部は、
前記遮断部により前記投射部から出射される光を遮断させて、前記投射部による光の投射を行わせないようにする
ことを特徴とする請求項4に記載の画像投射装置。 A blocking unit that blocks at least one of light emitted to the light modulation element and light emitted by being modulated by the light modulation element;
The controller is
The image projection apparatus according to claim 4, wherein the light emitted from the projection unit is blocked by the blocking unit so that the projection of the light by the projection unit is not performed.
前記制御部は、
前記投射部が投射する前記画像データに対して、前記画像処理部により黒を表示する黒画像データを挿入させて、前記投射部による光の投射を行わせないようにする
ことを特徴とする請求項4に記載の画像投射装置。 An image processing unit that performs image processing on the image data projected by the projection unit;
The controller is
The black image data for displaying black by the image processing unit is inserted into the image data projected by the projection unit so that light is not projected by the projection unit. Item 5. The image projection device according to Item 4.
前記第1の投射方向と、前記投射方向変更ステップにより変更した投射方向との間の投射角を導出する投射角導出ステップと、
入力された入力画像データを記憶する記憶ステップと、
前記画角および前記投射角に基づいて、前記記憶ステップで記憶された入力画像データの画像の一部の領域を切り出した切り出し画像データを所定周期のタイミングで生成する画像切り出しステップと、
前記記憶ステップで記憶された前記入力画像データの画像を、前記投射部が前記第1の投射方向から前記第2の投射方向に亘って投射する場合に、前記所定周期内での、前記切り出し画像データ生成タイミング位置と隣接する位置との前記駆動パルス間の間隔と、互いに隣接する駆動パルス間の間隔とのうち少なくとも一部の間隔が不均等な間隔になるように前記駆動パルスを生成する生成ステップと
を有する
ことを特徴とする画像投射方法。 A projection direction by a projection unit that modulates light from a light source based on image data by a light modulation element and projects the light at a predetermined angle of view, from a first projection direction to a second projection direction, a predetermined angle corresponding to a drive pulse A projection direction changing step that changes every time,
A projection angle derivation step for deriving a projection angle between the first projection direction and the projection direction changed by the projection direction change step;
A storage step for storing the input image data input;
An image cut-out step for generating cut-out image data obtained by cutting out a partial region of the image of the input image data stored in the storage step based on the angle of view and the projection angle at a predetermined cycle;
In the case where the projection unit projects the image of the input image data stored in the storage step from the first projection direction to the second projection direction, the cut-out image within the predetermined period. generating for generating a data generation timing position and spacing between the drive pulses to the adjacent position, the drive pulses such that at least a portion of the interval is unequal spacing among the spacing between the drive pulses that are adjacent to each other An image projection method comprising: steps.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012112913A JP5958069B2 (en) | 2012-05-16 | 2012-05-16 | Image projection apparatus and image projection method |
| PCT/JP2013/063337 WO2013172314A1 (en) | 2012-05-16 | 2013-05-13 | Image projection device and image projection method |
| TW102117379A TWI578086B (en) | 2012-05-16 | 2013-05-16 | Image projection device and portrait projection method |
| US14/542,310 US9549159B2 (en) | 2012-05-16 | 2014-11-14 | Image projection apparatus and image projection method for projecting cut-out image in a predetermined cycle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012112913A JP5958069B2 (en) | 2012-05-16 | 2012-05-16 | Image projection apparatus and image projection method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013239983A JP2013239983A (en) | 2013-11-28 |
| JP5958069B2 true JP5958069B2 (en) | 2016-07-27 |
Family
ID=49764640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012112913A Active JP5958069B2 (en) | 2012-05-16 | 2012-05-16 | Image projection apparatus and image projection method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5958069B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117176928B (en) * | 2023-09-06 | 2024-08-13 | 深圳市驰晶科技有限公司 | Delay-free projector system |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4059031B2 (en) * | 2002-08-09 | 2008-03-12 | セイコーエプソン株式会社 | projector |
| JP2005338249A (en) * | 2004-05-25 | 2005-12-08 | Seiko Epson Corp | Display device, display method, and display system |
| JP5036226B2 (en) * | 2006-06-13 | 2012-09-26 | 貴之 大平 | Planetarium control method and planetarium control system |
| JP2010010926A (en) * | 2008-06-25 | 2010-01-14 | Toshiba Corp | Video projector, and method for controlling the same |
| WO2010137626A1 (en) * | 2009-05-27 | 2010-12-02 | 京セラ株式会社 | Portable electronic device |
-
2012
- 2012-05-16 JP JP2012112913A patent/JP5958069B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013239983A (en) | 2013-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5958072B2 (en) | Projection apparatus and image correction method | |
| US9726965B2 (en) | Projection device, image correction method, and computer-readable recording medium | |
| WO2013147068A1 (en) | Projection device | |
| JP6146025B2 (en) | Projection apparatus, image correction method, and program | |
| WO2013172314A1 (en) | Image projection device and image projection method | |
| EP3383032B1 (en) | Mems laser scanning projector and method for projecting an image with a mems laser scanning projector | |
| JP5381145B2 (en) | projector | |
| JP2002501219A (en) | Video image rotation device | |
| JP5958079B2 (en) | Projection apparatus, image correction method, and program | |
| JP5849832B2 (en) | Projection device | |
| JP5958069B2 (en) | Image projection apparatus and image projection method | |
| JP5874529B2 (en) | Image projection apparatus and image projection method | |
| JP6146038B2 (en) | Projection device and projection method | |
| JP6146028B2 (en) | Projection device and projection method | |
| JP2007072031A (en) | Projector | |
| JP5639512B2 (en) | Lens unit, photographing apparatus using the same, and computer program | |
| JP2012004858A (en) | Multi-projection system and image projection control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151222 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160524 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160606 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Ref document number: 5958069 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |