JP2022034951A - Mobile sterilization device, and indoor sterilization system - Google Patents
Mobile sterilization device, and indoor sterilization system Download PDFInfo
- Publication number
- JP2022034951A JP2022034951A JP2020138905A JP2020138905A JP2022034951A JP 2022034951 A JP2022034951 A JP 2022034951A JP 2020138905 A JP2020138905 A JP 2020138905A JP 2020138905 A JP2020138905 A JP 2020138905A JP 2022034951 A JP2022034951 A JP 2022034951A
- Authority
- JP
- Japan
- Prior art keywords
- sterilization
- mobile
- sterilizing
- fixed
- indoor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001954 sterilising effect Effects 0.000 title claims abstract description 328
- 238000004659 sterilization and disinfection Methods 0.000 title claims abstract description 228
- 239000010419 fine particle Substances 0.000 claims abstract description 82
- 241000700605 Viruses Species 0.000 claims abstract description 55
- 239000000126 substance Substances 0.000 claims abstract description 16
- 238000005507 spraying Methods 0.000 claims abstract description 11
- 239000000428 dust Substances 0.000 claims description 79
- 238000001514 detection method Methods 0.000 claims description 68
- 241000894006 Bacteria Species 0.000 claims description 57
- 238000004891 communication Methods 0.000 claims description 33
- 230000000415 inactivating effect Effects 0.000 claims description 11
- 241000233866 Fungi Species 0.000 claims 1
- 230000000593 degrading effect Effects 0.000 claims 1
- 244000052616 bacterial pathogen Species 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 24
- 238000004140 cleaning Methods 0.000 description 13
- 241000282412 Homo Species 0.000 description 11
- 238000000034 method Methods 0.000 description 10
- 208000035473 Communicable disease Diseases 0.000 description 9
- 150000002500 ions Chemical class 0.000 description 9
- 230000000844 anti-bacterial effect Effects 0.000 description 6
- 239000003814 drug Substances 0.000 description 6
- 230000001678 irradiating effect Effects 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 208000015181 infectious disease Diseases 0.000 description 5
- 101001131829 Homo sapiens P protein Proteins 0.000 description 4
- 102000047119 human OCA2 Human genes 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 229940079593 drug Drugs 0.000 description 3
- 231100000206 health hazard Toxicity 0.000 description 3
- 230000002779 inactivation Effects 0.000 description 3
- 208000026935 allergic disease Diseases 0.000 description 2
- 239000000645 desinfectant Substances 0.000 description 2
- 239000000383 hazardous chemical Substances 0.000 description 2
- WQYVRQLZKVEZGA-UHFFFAOYSA-N hypochlorite Chemical compound Cl[O-] WQYVRQLZKVEZGA-UHFFFAOYSA-N 0.000 description 2
- 241000238876 Acari Species 0.000 description 1
- 206010011224 Cough Diseases 0.000 description 1
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 241000607479 Yersinia pestis Species 0.000 description 1
- 238000003915 air pollution Methods 0.000 description 1
- 239000013566 allergen Substances 0.000 description 1
- 230000000172 allergic effect Effects 0.000 description 1
- 208000010668 atopic eczema Diseases 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 230000001877 deodorizing effect Effects 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000003595 mist Substances 0.000 description 1
- 210000004400 mucous membrane Anatomy 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 208000024891 symptom Diseases 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images















Landscapes
- Filtering Of Dispersed Particles In Gases (AREA)
- Electric Vacuum Cleaner (AREA)
- Apparatus For Disinfection Or Sterilisation (AREA)
- Disinfection, Sterilisation Or Deodorisation Of Air (AREA)
Abstract
Description
本発明は、移動式除菌装置および室内除菌システムに関する。 The present invention relates to a mobile sterilization device and an indoor sterilization system.
室内に人が出入りする際に、室外で人に付着したウイルス、細菌、花粉などの微粒子が持ち込まれることがある。もしくはウイルスや細菌を保有している人が咳や会話などを行うことで、微粒子であるウイルスや細菌を含んだ飛沫が室内に飛散することがある。
このように、室内に持ち込まれて飛散した微粒子は、壁や天井などに付着しその部分に留まるか、空気中を一定時間浮遊しながら落下して、最終的には床や机上などに堆積する。また、床や壁面に堆積、付着した微粒子は人の歩行や接触により、空気中に再飛散する。
When a person enters or leaves the room, fine particles such as viruses, bacteria, and pollen attached to the person may be brought in outdoors. Alternatively, when a person carrying a virus or bacterium coughs or has a conversation, droplets containing the virus or bacterium, which are fine particles, may be scattered indoors.
In this way, the fine particles brought into the room and scattered adhere to the wall or ceiling and stay at that portion, or fall while floating in the air for a certain period of time and finally deposit on the floor or desk. In addition, the fine particles accumulated and adhered to the floor and the wall surface are re-scattered in the air by walking or contacting a person.
空気中に浮遊している微粒子が人の鼻や口から体内に取り込まれたり、壁や机などに付着した微粒子が人の手の接触を介して人の口(粘膜)付近に運搬されて体内に取り込まれたりする。これにより、微粒子が花粉やダニのようなアレルゲンの場合にはアレルギー疾患の発祥の原因に、微粒子がウイルスや細菌の場合にはウイルスや細菌に起因する感染症の原因になることがある。
よって、アレルギー疾患や感染症などの発症や感染を抑制、感染拡大を防止するには、室内に浮遊する微粒子を集塵し取り除いたり、床や机上に堆積する微粒子を取り除いたりするのが効果的である。
Fine particles floating in the air are taken into the body through the human nose and mouth, and fine particles attached to walls and desks are carried to the vicinity of the human mouth (mucous membrane) through the contact of human hands and inside the body. It is taken in by. As a result, when the fine particles are allergens such as pollen and mites, they may cause the onset of allergic diseases, and when the fine particles are viruses and bacteria, they may cause infectious diseases caused by viruses and bacteria.
Therefore, in order to suppress the onset and infection of allergic diseases and infectious diseases and prevent the spread of infection, it is effective to collect and remove fine particles floating in the room and to remove fine particles accumulated on the floor or desk. be.
そこで、人に害を与えないように人の有無や行動に応じて空間にイオンや薬剤などを散布し、空気中のウイルスや細菌を分解除菌させたりするための移動体が提案されている。
例えば、特許文献1には、「イオンを放出するイオン発生機または清掃を行う」、「人感センサからの出力信号に基づいて筐体の外部周辺の人の存在情報を得る」、「周辺環境に基づいて排気口からイオンを含む気流を放出する」、「イオンが室内全体に行き渡り、除菌効果や脱臭効果を向上させることができる」自走式電子機器が記載されている。
Therefore, a mobile body has been proposed to disperse viruses and bacteria in the air by spraying ions and chemicals in the space according to the presence or absence of humans and their behavior so as not to harm humans. ..
For example,
また、特許文献2には、「薬剤を収納するための収納部を設け」、「収納部に収納された薬剤をファンモータの回転による排気とともに排気口から噴出し、薬剤を部屋内に散布する」薬剤散布機能付き掃除ロボットが記載されている。
また、空気中の微粒子を効率よく集塵するために、人の行動に合わせて空気清浄運転が可能な移動型空気清浄機が提案されている。
例えば、特許文献3には、「人がいるかいないかを検知する人検知手段と」「人検知手段の情報を基に、駆動用モータとファンモータとを制御する制御手段を備えている」移動型空気清浄機が記載されている。
Further, in
Further, in order to efficiently collect fine particles in the air, a mobile air purifier capable of performing an air purifying operation according to a person's behavior has been proposed.
For example,
ところで、空気中における微粒子の濃度は非常に薄いため、空気中にイオンや薬剤を散布してもそのイオンや薬剤が微粒子に作用するとは限らず、空気中のウイルスや細菌などの微粒子の不活化や、分解は困難となっている。 By the way, since the concentration of fine particles in the air is very low, even if ions or chemicals are sprayed in the air, the ions or chemicals do not always act on the fine particles, and inactivation of fine particles such as viruses and bacteria in the air. It is difficult to disassemble.
また、紫外線や薬剤により照射対象を除菌する装置は、紫外線が照射できる範囲しか除菌できないため、紫外線や薬剤が届かない領域は除菌することができない。
また、本体の外部の対象を除菌する機器では、人が存在する空間に人に害を与える薬剤等を散布することはできないため、人が不在の空間や、人に影響を与えない範囲のみでしか動作することができない。
Further, since the device for sterilizing the irradiation target with ultraviolet rays or chemicals can sterilize only the range that can be irradiated with ultraviolet rays, it is not possible to sterilize the area where the ultraviolet rays or chemicals do not reach.
In addition, with a device that disinfects objects outside the main body, it is not possible to spray chemicals that are harmful to humans in the space where people exist, so only in spaces where people are absent or in areas that do not affect people. Can only work with.
また、一般的な据置型空気清浄機では、空気中に浮遊する微粒子を集塵できるものの、床上に落下し付着した微粒子は集塵することができなかった。
以下、特許文献1~3に記載の装置の課題について説明する。
特許文献1に記載の自走式電子機器は、イオンを空気中に放出しているが、前述した通り空気中のウイルスや細菌などの微粒子を不活化、分解除菌することは困難である。また、床上の微粒子は清掃することが可能であるが、空気中の微粒子を集塵することはできない。
Further, in a general stationary air purifier, although fine particles floating in the air can be collected, fine particles that have fallen on the floor and adhered cannot be collected.
Hereinafter, the problems of the apparatus described in
The self-propelled electronic device described in
特許文献2に記載の薬剤散布機能付き掃除ロボットは、文献中に記載のように害虫駆除のために薬剤を散布する場合には散布した薬剤が拡散して効果を発揮する。しかしながら、同様の方法で除菌に効果のある薬剤を散布しても、空気中のウイルスや細菌などの微粒子に直接接触して不活化、分解除菌することは困難である。また、薬剤は壁面に付着することで付着した箇所を除菌することは可能であるが、薬剤を霧状に噴霧すると付着する個所で除菌できても、薬剤が付着しない箇所では除菌できない。そのため、対象の全体を除菌することは困難であることから、清拭が必要である。
In the cleaning robot with a chemical spraying function described in
特許文献3に記載の移動型空気清浄機では、空気中に浮遊する花粉などの微粒子を集塵することが可能であるが、壁面に付着した微粒子の除去や除菌することはできない。
以上のように、イオンや薬剤、紫外線等を散布、照射することにより対象を除菌する機構を備えたものでは、接触対象の除菌は可能であるものの空気中に浮遊する微粒子を集塵、除菌することはできなかった。
このように、従来の機器では、接触対象の除菌を行いつつ、空気中に浮遊する微粒子を集塵し除菌することは同時に行えない。
The mobile air purifier described in
As described above, the one equipped with a mechanism for sterilizing the target by spraying and irradiating ions, chemicals, ultraviolet rays, etc. can sterilize the contact target, but collects fine particles floating in the air. It could not be sterilized.
As described above, with the conventional device, it is not possible to sterilize the contact target while collecting and sterilizing the fine particles floating in the air at the same time.
本発明は上記実状に鑑み創案されたものであり、微粒子の集塵や分解除菌することが可能な移動式除菌装置および室内除菌システムの提供を目的とする。 The present invention has been devised in view of the above circumstances, and an object of the present invention is to provide a mobile sterilization device and an indoor sterilization system capable of collecting dust and releasing bacteria of fine particles.
前記課題を解決するため、本発明の移動式除菌装置は、人を検知するセンサと、空気中に浮遊する微粒子を集塵する集塵手段と、紫外線照射または薬品の散布によりウイルスまたは細菌の少なくとも何れかを分解あるいは不活性化する除菌手段と、自律走行可能とする移動手段と、前記センサの検知内容が入力され、前記集塵手段、前記除菌手段、前記移動手段を制御する制御手段を備え、前記制御手段は、前記センサの検知内容に応じて、前記集塵手段と前記除菌手段とを切り替えて稼働させている。 In order to solve the above problems, the mobile sterilizer of the present invention comprises a sensor for detecting a person, a dust collecting means for collecting fine particles suspended in the air, and a virus or a bacterium by irradiation with ultraviolet rays or spraying of a chemical. A control for controlling the dust collecting means, the sterilizing means, and the moving means by inputting the sterilizing means for decomposing or inactivating at least one of them, the moving means for enabling autonomous traveling, and the detection contents of the sensor. The control means is operated by switching between the dust collecting means and the sterilizing means according to the detection content of the sensor.
本発明によれば、微粒子の集塵や分解除菌あるいは不活性化することが可能な移動式除菌装置および室内除菌システムを提供することができる。 INDUSTRIAL APPLICABILITY According to the present invention, it is possible to provide a mobile sterilization device and an indoor sterilization system capable of collecting dust of fine particles, releasing bacteria, or inactivating them.
以下、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。
<<実施形態1>>
図1に、本発明に係る実施形態1の移動式除菌装置1の模式図を示す。
本発明の実施形態1の移動式除菌装置1について説明する。
Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings as appropriate.
<<
FIG. 1 shows a schematic diagram of the
The
[全体構成]
まず、本発明の実施形態1の移動式除菌装置1の構成について、図1を用いて説明する。
移動式除菌装置1は、本体1H外殻に紫外線照射部11と、吸気口12、排気口13とを備え、本体下方に駆動輪16を備えている。移動式除菌装置1は、移動手段の駆動輪16により、自律移動が可能である。
[overall structure]
First, the configuration of the
The
除菌手段である紫外線照射部11は、紫外線101を照射する。紫外線101の照射により、照射対象の表面に付着したウイルスや細菌を分解または抗菌(消毒)あるいは不活性化することができる。
移動式除菌装置1の内部には、遠心羽根車14、フィルタ15、制御部110、通信部111、人検知センサ112、およびダストセンサ113を備えている。
The
Inside the
遠心羽根車14は、集塵手段である。遠心羽根車14を稼働することで、床面Y上の塵埃を含む吸気102を吸気口12から取り込む。吸い込んだ空気から、塵埃をフィルタ15で除去する。そして、フィルタ15を通して清浄にされた清浄空気103を排気口13から排出する。
フィルタ15はULPAフィルタ、HEPAフィルタなどの目の細かいフィルタであり、ウイルスや細菌などの微粒子を集塵することができる。
[床面ブラシ]
The
The
[Floor brush]
図2に、本発明の実施形態1の移動式除菌装置1の1例を下方から見た斜視図を示す。
図2に示すように、吸気口12付近に床面ブラシ17を備えて床面Yに付着した微粒子をかきだす構造を備えていれば、床面Yに付着した微粒子をかきだして吸気口12(図1参照)から吸引し、集塵することも可能である。
移動式除菌装置1の本体1Hの底面1h1には、駆動輪16や吸気口12の間に水平方向に回転可能な床面ブラシ17が設置されている。床面ブラシ17は支軸17j廻りに水平方向に回転する。
FIG. 2 shows a perspective view of an example of the
As shown in FIG. 2, if the
A
床面ブラシ17を床面Yに平行に回転させることで床面Yに付着した微粒子を巻き上げ、吸気口12から微粒子をより多く集塵できる。
また、本体1Hの底面1h1に紫外線照射部11Cを設ければ紫外線101Cにより床面Yに付着したウイルスや細菌を分解除菌あるいは不活性化することができる。そこで、本体1Hの底面1h1に紫外線照射部11Cを設置することが好ましい。
By rotating the
Further, if the
図3に、本発明の実施形態1の移動式除菌装置1の制御ブロック図の一形態を示す。
移動式除菌装置1は、検知手段である人検知センサ112とダストセンサ113とを備えている。
FIG. 3 shows one embodiment of the control block diagram of the
The
人検知センサ112により、室内の人の有無を検知し、ダストセンサ113により吸気102中の微粒子量を検知する。
また、移動式除菌装置1は、制御手段である制御部110と通信手段である通信部111とを備えている。
制御部110で、センサ(112、113)で取得した情報を処理して通信部111より外部に通信することができる。
The
Further, the
The
移動式除菌装置1は上述の構成を用いて、制御部110の制御により、各種センサ(112、113)により検知した情報を基にして駆動輪16を駆動して自律走行する。そして、制御部110の制御により、紫外線照射部11(図3において除菌部と記載)の紫外線照射により本体外側に位置するウイルスや細菌などを不活化、除菌する。また、移動式除菌装置1は、制御部110の制御により、遠心羽根車14(図3において集塵部と記載)を稼働させて塵埃をかきだし、吸気口12から塵埃を含む空気を吸い込み、フィルタ15により空気中のウイルスや細菌などの微粒子を集塵する。
Using the above configuration, the
[制御構成]
次に、実施形態1の移動式除菌装置1の制御構成について、図3の制御ブロック図を用いて説明する。
[センサの種類]
前記したように、移動式除菌装置1は検知部として人検知センサ112とダストセンサ113を備えている。人検知センサ112でユーザが居るか居ないか検知する。ダストセンサ113で空気中の微粒子濃などの室内環境を測定する構成である。
[Control configuration]
Next, the control configuration of the
[Sensor type]
As described above, the
人検知センサ112はどのような方式のセンサでも良いが、レーザー、可視光、超音波、マイクロ波、ミリ波などを用いて、電波により非接触で人を検知することができるセンサが望ましい。
例えば、ユーザの存在の有無を検知する人検知センサ112としては、人から放射される赤外線を検知する赤外線センサ、人の形状を認識するサーモパイルや、人の画像を取得するカメラ、レーザーや超音波等の反射波を検知して対象との距離を検知する距離カメラ等が使用できる。
The
For example, the
ダストセンサ113は、空気中の微粒子量を検知できるセンサであればよい。本実施形態1では通過した微粒子を光で検知するセンサを想定しているが、室内環境を測定できるセンサであればセンサの種類は問わない。
室内環境を検知するセンサとしては、上述の微粒子の量を測定できるダストセンサ113や、室内の空気質を検出できるにおいセンサ、CO2センサ等が使用される。また、室内の使用状況を検出する温湿度センサ、照度センサなどが使用できる。
The
As the sensor for detecting the indoor environment, the
ダストセンサ113やにおいセンサ、CO2センサ等で室内の空気の汚染状況を検知することで、空気清浄が必要な状態かどうかを認識できる。温湿度センサや照度センサにより室内の使用状況を把握できる。
検知部(112、113)により検知した結果は制御部110に送付される。そして、検知部(112、113)の検知結果に応じて、制御部110により、走行駆動部の駆動輪16、集塵部の遠心羽根車14、除菌部の紫外線照射部11などを駆動して移動式除菌装置1の動作を制御する。
By detecting the state of air pollution in the room with a
The result detected by the detection unit (112, 113) is sent to the
移動式除菌装置1は、走行駆動部である駆動輪16(図2参照)を制御することで、自由に移動することが可能である。ここで、本実施形態1では走行駆動部として駆動輪16を備えて車輪走行する形態を示すが、走行駆動部の構成は車輪走行に限らず、クローラ走行や多脚走行などの移動手段であれば良い。
また、集塵部である遠心羽根車14を駆動することで、移動式除菌装置1の外部から空気を吸引し、空気に含まれる微粒子をフィルタ15に集塵することができる。また、除菌部である紫外線照射部11を駆動することで、紫外線を照射し、照射対象のウイルスや細菌を不活化(抗菌)させることができる。ここで、本実施形態1では除菌部として紫外線照射部11を備えているが、紫外線に限らず、消毒薬(アルコールや次亜塩素酸水等)を噴霧する装置もしくは清拭する装置(薬品を散布する装置)であっても良い。
The
Further, by driving the
また、制御部110は、通信部111を介して、動作状況である検知部(112、113)の検知結果をユーザに報知することが可能である。ユーザへの報知方法は問わない。例えば、通信部111がクラウド(クラウドコンピューティング)にデータを送信しその情報をユーザがブラウザで確認しても良いし、スマートフォンなどの表示装置に通信部111から直接データを送信しても良い。
Further, the
[動作方法]
次に、実施形態1の移動式除菌装置1の動作について、図4A、図4Bの動作概要図、図5のフローチャートを用いて説明する。
図4Aに、本発明の実施形態1の移動式除菌装置1のユーザ在室時の動作時の概略図を示す。図4Bに、本発明の実施形態1の移動式除菌装置1のユーザ不在時の動作時の概略図を示す。
図5に、実施形態1の移動式除菌装置1のフローチャートの一形態を示す。
制御を開始すると、図5のステップS11で、図4Aに示すように、移動式除菌装置1は本体1H内に備えた人検知センサ112などの検知部から照射する電波112aにより本体1H前方のユーザを検知する。
[Operation method]
Next, the operation of the
FIG. 4A shows a schematic view of the
FIG. 5 shows one embodiment of the flowchart of the
When the control is started, in step S11 of FIG. 5, as shown in FIG. 4A, the
また同様に移動式除菌装置1自体の自己位置を下記のように認識する。そして、ダストセンサ113によりダスト量を検知しながら、図5のステップS12で、走行駆動部である駆動輪16を動作させて清掃動作を開始する。
[部屋形状認識、自己位置推定方法]
部屋内の移動式除菌装置1の自己位置を検出するには、まず移動式除菌装置1が除菌を行う部屋の形状を取得する。
Similarly, the self-position of the
[Room shape recognition, self-position estimation method]
In order to detect the self-position of the
部屋の形状を取得するには、人検知センサ112の無線センサとして、もしくは人検知センサ112とは別に、赤外線を検知する赤外線センサ、可視光を検知するカメラ、レーザー等の反射波を検知して、対象との距離を検知する距離カメラ等を使用する。また、制御部110にSLAM(Simultaneous Localization and Mapping)等の地図作成手段を備えることで、人の検知とは別に部屋の形状や部屋内の自己位置を検出することが可能である。
To acquire the shape of the room, use it as a wireless sensor for the
例えば、人検知センサ112が可視光を検知するカメラであった場合、カメラの画像を処理して人を検知するとともに、部屋全体の画像から稜線(壁と壁とが作る線、壁と床とが作る線、壁と天井とが作る線)を検知することにより部屋の形状と大きさ、また部屋の中での自己位置(移動式除菌装置1自体の自己位置)を推定することが可能である。なお、部屋の形状や間取りを検出する機能を有する空気調和機が知られているが、通信によりこのような空気調和機等から部屋の形状や間取りを取得することも可能である。
For example, if the
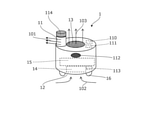
図6に、実施形態1の他例の距離センサ114を搭載した移動式除菌装置1の斜視図を示す。
例えば、人検知センサ112とは別に部屋全体を見渡せるレーザー照射型の距離センサ114を搭載している移動式除菌装置1の場合、距離センサ114により部屋の壁面との距離を検知することにより、部屋の形状と部屋内の移動式除菌装置1の自己位置を検出することが可能である。
FIG. 6 shows a perspective view of the
For example, in the case of the
移動式除菌装置1は、部屋の形状と自己位置を検出することにより、走行軌跡を記録できる。これにより、移動式除菌装置1は、空気清浄や除菌できた場所を認識したり、部屋全体の空気清浄や除菌が完了したことを確認したりすることができる。
The
図5のステップS13で、ユーザが在室しているか否か判断する。
ユーザが在室している場合(図5のステップS13でYES)、下記の動作が行われる。
In step S13 of FIG. 5, it is determined whether or not the user is in the room.
When the user is in the room (YES in step S13 of FIG. 5), the following operation is performed.
[室内に人が在室している場合の動作]
室内にユーザや人が在室していることを検知した場合、つまりユーザ在室時には、図5のステップS14で、集塵部の遠心羽根車14を動作させる。移動式除菌装置1は制御部110により集塵部である遠心羽根車14を駆動し、図4Aに示すように、微粒子を含んだ空気である吸気102を外部から本体1Hに取り込む。そして、移動式除菌装置1は空気中に浮遊するウイルスや細菌などの微粒子をフィルタ15(図1、図6参照)に集塵し、清浄空気103を外部に放出する。移動式除菌装置1は、駆動輪16を動作させて部屋内を移動しながら集塵を続け、図5のステップS15で、ダスト量が基準以下か判断する。なお、ダスト量の基準は、予め清掃後のダスト量等を参考にして設定される。
[Operation when a person is in the room]
When it is detected that a user or a person is present in the room, that is, when the user is in the room, the
吸気102内の微粒子、ダスト量が基準よりも少なくなった場合(図5のステップS15でYES)には、空気中の微粒子の集塵が完了したと判断し、制御を終了する。
一方、吸気102内の微粒子、ダスト量が基準よりも少なくなっていない場合(図5のステップS15でNO)には、図5のステップS14に移行する。
ユーザが在室していない場合(図5のステップS13でNO)、下記の動作が行われる。
When the amount of fine particles and dust in the
On the other hand, when the amount of fine particles and dust in the
When the user is not present (NO in step S13 of FIG. 5), the following operation is performed.
[室内に人が不在の場合の動作]
室内に人が在室していない場合、ユーザ不在時には、図5のステップS16で、除菌部(11)を動作させる。つまり、図4Bに示すように、移動式除菌装置1は除菌部である紫外線照射部11を駆動し、室内の壁面や床面Y、もしくは家具などの表面に付着したウイルスや細菌などの微粒子を不活化、分解除菌あるいは不活性化する。(室内に浮遊しているウイルスなども紫外線の照射により不活性化可能である)
そして、図5のステップS17で、部屋全体を除菌したか否か判断される。前記したように、部屋の形状と自己位置を検出することにより、走行軌跡を記録できる。これにより、移動式除菌装置1(1A)は、空気清浄や除菌できた場所を認識したり、部屋全体の空気清浄や除菌が完了したことを確認したりすることができる。
[Operation when no one is present in the room]
When no person is present in the room and the user is absent, the sterilizing unit (11) is operated in step S16 of FIG. That is, as shown in FIG. 4B, the
Then, in step S17 of FIG. 5, it is determined whether or not the entire room has been sterilized. As described above, the traveling locus can be recorded by detecting the shape of the room and the self-position. As a result, the mobile sterilizing device 1 (1A) can recognize the place where the air cleaning and sterilization have been completed, and can confirm that the air cleaning and sterilization of the entire room have been completed.
走行駆動部の駆動輪16の制御により、除菌対象の部屋全体を清掃したと判断した場合に(図5のステップS17でYES)、除菌の制御を終了する。
一方、部屋全体を清掃したと判断されない場合(図5のステップS17でNO)、図5のステップS17に移行し、除菌の動作を継続する。
When it is determined that the entire room to be sterilized has been cleaned by the control of the
On the other hand, if it is not determined that the entire room has been cleaned (NO in step S17 of FIG. 5), the process proceeds to step S17 of FIG. 5 and the sterilization operation is continued.
[効果]
人が室内に存在(在室)している場合に集塵部の遠心羽根車14を動作させることにより、人の活動で空気中に飛散する微粒子や飛沫を集塵し、効率よく空気中のウイルスや細菌などの微粒子を集塵することが可能となる。また、ウイルスや細菌を保有している人から飛散する微粒子を即座に集塵することにより、室内での感染症の感染を防止できる。
また、人に対して殺菌効果のある紫外線を照射すると人の健康被害を誘発する可能性があるため、ユーザの在室の有無を検知して除菌部の紫外線照射部11を切り替えて動作させる。これにより、人に害を与えずにウイルスや細菌の除菌が可能となる。なお、ここでは、ユーザ不在時には除菌部(11)だけを動作させて集塵部(14)を動作させない構成としているが、集塵部(14)はユーザの有無に関わらず動作させても問題ない。そのため、移動式除菌装置1は、除菌部(11)と同時に集塵部(14)を動作させても良く、その場合は物体に付着したウイルスや細菌の不活化と同時に空気中の微粒子を集塵することも可能である。
[effect]
By operating the
In addition, since irradiating a person with ultraviolet rays having a bactericidal effect may induce a human health hazard, the presence or absence of the user's room is detected and the
また、実施形態1のような移動式除菌装置1は、室内を移動しながら紫外線を照射して微粒子を分解除菌あるいは不活性化することから、紫外線照射対象が広く、人が移動する領域はほとんどカバーできる。そのため、移動式除菌装置1の死角に入ったために除菌できない領域が少ない。
また、固定式の除菌手段や集塵手段では常に床の一部分に設置位置を設定しておく必要があり場所をとって邪魔になることがある。しかし、実施形態1のような移動式除菌装置1は、必要に応じて必要な部屋で動作させたり、使用しない場合は自動的に邪魔にならない場所に待機させることも可能であることから、人の邪魔にならないように室内の除菌を行うことができる。
Further, since the
In addition, with fixed sterilization means and dust collecting means, it is necessary to always set the installation position on a part of the floor, which may take up a lot of space and get in the way. However, since the
また、移動式であることから1台で複数の部屋の清掃や除菌に対応することも可能である。例えば、日中は人が活動しているが夜間は活動していないスペースなど、夜中に自動的に動作させておくことによって、複数の部屋を自動的に清掃、除菌することも可能である。また、最も効果の高い場所に移動して集塵、除菌動作を行うことが可能であるため、固定式に比べて効率と集塵、除菌性能が高く、集塵や除菌にかかる時間を短縮できる。また、集塵手段や除菌手段を移動させたり操作したりの手間が少なく室内除菌の効果を発揮することができる。 In addition, since it is mobile, it is possible to clean and sterilize multiple rooms with one unit. For example, it is possible to automatically clean and sterilize multiple rooms by automatically operating in the middle of the night, such as a space where people are active during the day but not at night. .. In addition, since it is possible to move to the most effective place to perform dust collection and sterilization operations, efficiency, dust collection and sterilization performance are higher than those of the fixed type, and the time required for dust collection and sterilization is high. Can be shortened. In addition, the effect of indoor sterilization can be exhibited with less labor of moving and operating the dust collecting means and the sterilizing means.
以上のように、人の行動を検知するセンサ(112)と、空気中に浮遊する微粒子を集塵する集塵部(14)と、ウイルス/細菌等を分解あるいは不活性化する除菌部(11)と、自律走行可能な移動手段(駆動輪16)と、制御手段(制御部110)を備え、センサ(112)の検知内容に応じて集塵手段/除菌手段を切り替える。これにより、人の有無に限らず室内の微粒子、ウイルスや細菌を除去あるいは不活化し、室内に居住するユーザが感染症に罹患することを防止できる。 As described above, a sensor (112) that detects human behavior, a dust collector (14) that collects fine particles floating in the air, and a sterilization unit that decomposes or inactivates viruses / bacteria (14). 11), a moving means (driving wheel 16) capable of autonomous traveling, and a control means (control unit 110) are provided, and the dust collecting means / sterilizing means is switched according to the detection content of the sensor (112). This makes it possible to remove or inactivate fine particles, viruses and bacteria in the room regardless of the presence or absence of a person, and prevent the user living in the room from suffering from an infectious disease.
実施形態1によれば、人の行動に合わせて空気中を浮遊する微粒子と床面Yや壁面に付着した微粒子の両方を集塵、除菌することが可能になるので、人に害を与えることなく室内を効率良く除菌することが可能である。そのため、ウイルスや細菌による感染症の感染を防止または抑制することができる。これにより、室内のウイルス、細菌などの微粒子を除去、分解除菌(抗菌)あるいは不活性化することで、アレルギー症状の発症や、感染症の感染を抑制できる。 According to the first embodiment, it is possible to collect and sterilize both the fine particles floating in the air and the fine particles adhering to the floor surface Y or the wall surface according to the human behavior, which is harmful to humans. It is possible to efficiently sterilize the room without any problems. Therefore, it is possible to prevent or suppress the transmission of infectious diseases caused by viruses and bacteria. As a result, it is possible to suppress the onset of allergic symptoms and the transmission of infectious diseases by removing fine particles such as viruses and bacteria in the room, and by dissociating bacteria (antibacterial) or inactivating them.
<<実施形態2>>
図7に、本発明の実施形態2の室内除菌システム3を構成する固定式除菌装置2の模式図を示す。
<<
FIG. 7 shows a schematic diagram of a fixed
図8Aに、本発明の実施形態2の室内除菌システム3のユーザ在室時の動作の概略図を示し、図8Bに、本発明の実施形態2の室内除菌システム3のユーザ不在室時の動作の概略図を示す。
本発明の実施形態2の室内除菌システム3は、実施形態1で説明した移動式除菌装置1(図1参照)と、実施形態2の固定式除菌装置2(図7参照)とを組み合わせて構成したものである。
FIG. 8A shows a schematic diagram of the operation of the
The
移動式除菌装置1は実施形態1の説明と同一であることから、実施形態1と異なる部分を中心に、固定式除菌装置2と室内除菌システム3の構成を以下説明する。
[全体構成]
実施形態2の室内除菌システム3の全体構成について説明する。
Since the
[overall structure]
The overall configuration of the
図8Aに示すように、室内除菌システム3は、移動式除菌装置1(図1参照)と固定式除菌装置2(図7参照)とにより構成されている。
図7に示すように、固定式除菌装置2は、除菌部としての紫外線照射部21と、制御部210、通信部211とを備えている。固定式除菌装置2は、紫外線照射部21から紫外線201を外部(室内)に照射する構成である。
固定式除菌装置2は、移動式除菌装置1では届かない高所に設置されており、固定式除菌装置2の除菌対象範囲と移動式除菌装置1の除菌対象範囲は重なっていないことが望ましい。移動式除菌装置1と固定式除菌装置2との除菌対象範囲が重ならないことで、より効率的または効果的な除菌が可能となる。
As shown in FIG. 8A, the
As shown in FIG. 7, the fixed
The fixed
図9に、本発明の実施形態2の室内除菌システム3の制御ブロック図の一形態を示す。
固定式除菌装置2は、通信部211を介して移動式除菌装置1の通信部111(図1参照)と通信可能である。固定式除菌装置2は、移動式除菌装置1から受信した情報に基づいて、制御部210で除菌部である紫外線照射部21を駆動する。
つまり、固定式除菌装置2は、移動式除菌装置1の検知部の人検知センサ112(図3参照)で検知した情報に応じて、通信部111を介して送信された情報に応じて動作可能である。
FIG. 9 shows one embodiment of the control block diagram of the
The fixed
That is, the fixed
図8A、図8Bに示すように、移動式除菌装置1は室内の床面Y付近を移動可能な状態で設置されている。一方、固定式除菌装置2は室内の天井T付近の壁面Kに固定し設定されている。移動式除菌装置1が室内を移動して室内のユーザや室内環境などの情報を取得し通信部111(図9参照)を介して情報を固定式除菌装置2に送信する。これにより、図7に示す固定式除菌装置2に検知部がなくても、移動式除菌装置1の検知部の人検知センサ112が人の行動を認識してそれに応じた動作が可能となる。
As shown in FIGS. 8A and 8B, the
[動作方法]
図10に、本発明の実施形態2の室内除菌システム3の制御のフローチャートの一形態を示す。
実施形態2の室内除菌システム3の動作を説明する。
室内除菌システム3が制御を開始すると、図10のステップS21、S22で、まず、図8A、図8Bに示すように、移動式除菌装置1が駆動輪16を駆動して室内を移動しつつ、検知部の人検知センサ112で照射する電波112aにより室内の人の存在を検知するとともに、自己位置を認識する。また、移動式除菌装置1は、ダストセンサ113(図9参照)で室内環境を示すダスト量を検知する。
[Operation method]
FIG. 10 shows an embodiment of a flowchart for controlling the
The operation of the
When the
続いて、ステップS23で、移動式除菌装置1はユーザが在室しているか否か判定する。
移動式除菌装置1の人検知センサ112により、室内にユーザが在室していることを検知した場合(ステップS23でYES)、ステップS24で、図8Aに示すように、室内除菌システム3は移動式除菌装置1の集塵部(14)を動作させる。つまり、移動式除菌装置1は制御部110により集塵部である遠心羽根車14を駆動する。これにより、微粒子を含んだ吸気102を外部から本体1Hに取り込み、空気中に浮遊するウイルスや細菌などの微粒子をフィルタ15(図1参照)に集塵し、清浄空気103を外部に放出する。このように、駆動輪16を動作させて部屋内を移動しながら集塵を続ける。
Subsequently, in step S23, the
When the
そして、ステップS25で、吸気102内の微粒子、ダスト量が基準よりも少ないか否か判定する(ステップS25でYES)。
吸気102内の微粒子、ダスト量が基準よりも少なくなった場合(ステップS25でYES)には、空気中の微粒子の集塵が完了したと判断し、制御を終了する。
吸気102内の微粒子、ダスト量が基準よりも少なくない場合(ステップS25でNO)には、ステップS24に移行して部屋内を移動しながら集塵を続ける。
Then, in step S25, it is determined whether or not the amount of fine particles and dust in the
When the amount of fine particles and dust in the
When the amount of fine particles and dust in the
一方で、移動式除菌装置1の人検知センサ112により、ユーザが不在であることを検知した場合(ステップS23でNO)、つまりユーザ不在時には、ステップS26で、図8Bに示すように、室内除菌システム3は移動式除菌装置1の除菌部の紫外線照射部11と、固定式除菌装置2の除菌部の紫外線照射部21とを動作させる。
そして、ステップS27で、部屋全体を除菌したか、或いは、一定時間経過したかが判定される。
On the other hand, when the
Then, in step S27, it is determined whether the entire room has been sterilized or whether a certain period of time has passed.
移動式除菌装置1が室内全体を走行して部屋全体を除菌したことが確認され、固定式除菌装置2による除菌に効果があると考えられる一定時間が経過するか、そのどちらかもしくは両方が達成された場合(ステップS27でYES)、室内全体を除菌したと判断して制御を終了する。なお、部屋全体を除菌したかは、予め移動式除菌装置1が部屋の形状を取得しているので可能である。
一方、移動式除菌装置1が室内全体を走行して部屋全体を除菌しておらず、かつ、固定式除菌装置2による除菌に効果があると考えられる一定時間が経過していない場合(ステップS27でNO)、ステップS26に移行し、除菌を継続する。
It was confirmed that the
On the other hand, the
[効果]
固定式除菌装置2から照射される紫外線201は室内空間の上方の領域でウイルスや細菌を分解除菌あるいは不活性化する。移動式除菌装置1から照射される紫外線101は室内空間の下方や家具など人が接触する部分を中心にウイルスや細菌を分解除菌あるいは不活性化する。よって、実施形態2の空間除菌システム3を使用することで、室内の上方の領域および下方の領域全体をくまなく除菌することが可能となる。
[effect]
人に対して殺菌効果のある紫外線を照射すると人の健康被害を誘発する可能性がある。そこで、移動式除菌装置1の人検知センサ112によりユーザの在室の有無を検知して、移動式除菌装置1の除菌部(11)と固定式除菌装置2の除菌部(21)とを切り替えて動作させることにより、人に害を与えずにウイルスや殺菌の除菌が可能となる。
Irradiating humans with ultraviolet rays, which have a bactericidal effect, may induce human health hazards. Therefore, the presence or absence of the user's room is detected by the
ここでは、ユーザ不在時には移動式除菌装置1の除菌部(11)だけを動作させて集塵部(14)を動作させない構成としている。しかしながら、移動式除菌装置1の集塵部(14)はユーザの有無に関わらず動作させても問題ないため、除菌部(11)と同時に集塵部(14)を動作させても良い。この場合は物体に付着したウイルスや細菌の分解除菌あるいは不活性化と同時に空気中の微粒子を集塵することも可能である。
Here, when the user is absent, only the sterilizing unit (11) of the
また固定式除菌装置2の設置位置が人の身長に比べて非常に高い場合など、除菌範囲が、人が活動する領域より十分に離れており、固定式除菌装置2から照射される紫外線201が人に害がない場合には、ユーザ在室時に移動式除菌装置1の集塵部と同時に固定式除菌装置2を動作させても良い。その場合は、空気中の微粒子集塵と同時に、室内の一部空間の物体に付着したウイルスと殺菌の分解除菌あるいは不活性化が可能となる。
Further, when the installation position of the fixed
なお、実施形態2の室内除菌システム3は、1台の移動式除菌手段(1)と1台の固定式除菌手段(2)から構成されているが、移動式除菌手段(1)と固定式除菌手段(2)とを備えて構成されていれば、それぞれの台数は何台でもよい。そこで、対象とする部屋の大きさや除菌にかける時間によって移動式除菌手段(1)と固定式除菌手段(2)の数は適切に設定する必要がある。
The
以上のように、移動式除菌装置1は、人の行動を検知するセンサ(112)と、空気中に浮遊する微粒子を集塵する集塵手段(14)と、ウイルス/細菌等を分解あるいは不活性化する除菌手段(11)と、自律走行可能な移動手段(16)と、制御手段(110)とを備えている。また、固定式除菌装置2は、除菌手段(21)と制御手段(210)とを備えている。
As described above, the
そして、移動式除菌装置1のセンサ(112)の検知内容に応じて集塵手段/除菌手段を切り替える室内除菌システム3により、人の有無に限らず室内の微粒子、ウイルスや殺菌を除去あるいは不活化し、室内に居住するユーザが感染症に罹患することを抑制または防止できる。
なお、固定式除菌装置2は単数の場合を例示したが、固定式除菌装置2は複数備えてもよい。
また、固定式除菌装置2は、部屋の全体を見渡せる高い位置にある。この固定式除菌装置2に室内を見渡すカメラを備え、制御部210で部屋の形状や間取りを認識するようにして、結果を移動式除菌装置1に通信で知らせる。そして、移動式除菌装置2の制御に部屋の形状等を反映するようにしてもよい。この点は、次の実施形態3でも同様である。
Then, the
Although the case of a single
Further, the fixed
<<実施形態3>>
本発明の実施形態3の構造について、図11を用いて説明する。
図11に、本発明の実施形態3の室内除菌システム3Aの動作時の概略図を示す。
本発明の実施形態3の室内除菌システム3Aは、実施形態1の移動式除菌装置1を2台(1A、1B)と、実施形態2の固定式除菌装置2を1台とを備えた構成である。
移動式除菌装置1A、1Bの構成は実施形態1の移動式除菌装置1の構成同様、固定式除菌装置2の構成は実施形態2の固定式除菌装置2の構成と同様である。そこで、実施形態1や実施形態2と異なる部分(構成)を中心に、移動式除菌装置1A、1Bを2台と、固定式除菌装置2を1台とで、構成された室内除菌システム3Aの構成を以下で説明する。
<<
The structure of the third embodiment of the present invention will be described with reference to FIG.
FIG. 11 shows a schematic diagram of the
The
The configurations of the
実施形態3の室内除菌システム3Aは、移動式除菌装置(A)1Aと移動式除菌装置(B)1Bの2台の移動式除菌装置と、固定式除菌装置2とを備えて構成されている。
移動式除菌装置(A)1Aと移動式除菌装置(B)1Bは、それぞれ検知部(112A)、(112B)、走行駆動部(16A)、(16B)、集塵部(14A)、(14B)、除菌部(11A)、(11B)、制御部(110A)、(110B)、通信部(111A)、(111B)を備えている。2台の移動式除菌装置(A)1Aと移動式除菌装置(B)1Bは、検知部である人検知センサ112Aと人検知センサ112Bによって室内の人の有無を検知することが可能である。
The
The mobile sterilizer (A) 1A and the mobile sterilizer (B) 1B have a detection unit (112A), (112B), a traveling drive unit (16A), (16B), a dust collection unit (14A), respectively. (14B), a sterilization unit (11A), (11B), a control unit (110A), (110B), a communication unit (111A), and (111B) are provided. The two mobile sterilizers (A) 1A and mobile sterilizer (B) 1B can detect the presence or absence of a person in the room by the
固定式除菌装置2は除菌部の紫外線照射部21、制御部210、および通信部211を備えている。
そして、移動式除菌装置(A)1Aおよび移動式除菌装置(B)1Bと、固定式除菌装置2とはそれぞれ通信部を介して通信可能である。つまり、移動式除菌装置(A)1Aと移動式除菌装置(B)1Bの各検知部(112A)、(112B)で検知した情報に応じて、室内除菌システム3Aが動作可能である。
The fixed
Then, the mobile sterilizing device (A) 1A, the mobile sterilizing device (B) 1B, and the fixed
本室内除菌システム3Aの動作を説明する。
室内除菌システム3Aが制御を開始すると、まず移動式除菌装置(A)1Aと移動式除菌装置(B)1Bが室内を移動しつつ、各人検知センサ112A、112Bそれぞれが照射する電波112Aa、112Baによって室内の人の存在を検知する。ここで、室内の人の有無はどちらの移動式除菌装置(1A、1B)が検知してもよい。図11では、移動式除菌装置(A)1Aの検知方向が人Pに近いことから移動式除菌装置(A)1Aの人検知センサ112Aによって人Pを検知している。
The operation of the main
When the
前記実施形態2と同様に、室内にユーザが在室していることをどちらかの移動式除菌装置(1A、1B)が検知した場合、つまりユーザ在室時には室内除菌システム3Aは移動式除菌装置(A)1A及び移動式除菌装置(B)1Bの各集塵部(14A)、(14B)を動作する。
Similar to the second embodiment, when either mobile sterilizing device (1A, 1B) detects that the user is in the room, that is, when the user is in the room, the
これにより、それぞれの移動式除菌装置(1A、1B)は、移動しながら吸気102A、102Bをそれぞれ外部から本体1Ah、1Bhに取り込む。そして、移動式除菌装置(1A、1B)は、空気中に浮遊していた吸気102A、102Bに含まれるウイルスや細菌などの微粒子を本体1Ah、1Bh内部のフィルタ15A、15Bに集塵し、清浄空気103A、103Bにして外部に放出する。そして、ダストセンサ113A、1113Bの検知により、両方の吸気102A、102Bに含まれる微粒子が十分に少なくなった場合に、移動式除菌装置(1A、1B)は、空気中に含まれる微粒子の集塵が完了したと判断し、制御を終了する。
As a result, each mobile sterilizer (1A, 1B) takes in the
前記実施形態2と同様に、ユーザが不在であることを両方の移動式除菌装置(1A、1B)が検知した場合、つまりユーザ不在時には室内除菌システム3Aは、移動式除菌装置(A)1Aと移動式除菌装置(B)1Bの除菌部(11A)、(11B)と、固定式除菌装置2の除菌部の紫外線照射部21を動作させる。
時間が経過し、室内除菌システム3Aは、移動式除菌装置(A)1Aと移動式除菌装置(B)1Bが2台で室内全体を走行して部屋全体を除菌したことが確認されるか、或いは、固定式除菌装置2による除菌に効果があると考えられる一定時間が経過するか、そのどちらかもしくは両方が達成された場合、室内全体を除菌したと判断して制御を終了する。
Similar to the second embodiment, when both mobile sterilizers (1A and 1B) detect that the user is absent, that is, when the user is absent, the
As time passed, it was confirmed that the
なお、人に対して殺菌効果のある紫外線を照射すると人の健康被害を誘発する可能性がある。そこで、室内除菌システム3Aは、ユーザの在室の有無を検知して除菌部(11A)、(11B)、(21)を切り替えて動作させることにより、人に害を与えずにウイルスや殺菌の除菌が可能となる。また、前記実施形態1、2と同様に、集塵部(14A)、(14B)はユーザの有無に関わらず動作させても問題ない。そのため、移動式除菌装置(1A、1B)は、除菌部(11A)、(11B)と同時に集塵部(14A)、(14B)を動作させてもよい。その場合は、室内除菌システム3Aにより、物体に付着したウイルスや細菌の分解除菌あるいは不活性化と同時に空気中の微粒子を集塵することも可能である。
Irradiating humans with ultraviolet rays, which have a bactericidal effect, may induce human health hazards. Therefore, the
また、前記実施形態2と同様に、固定式除菌装置2の設置位置によってはユーザ在室時に移動式除菌装置1の集塵部と同時に固定式除菌装置2を動作させても良く、その場合は、空気中の微粒子集塵と同時に、室内の一部空間の物体に付着したウイルスと殺菌の分解除菌あるいは不活性化が可能となる。なお、移動式除菌装置(A)1Aと移動式除菌装置(B)1Bの各人検知センサ112A、112Bによって、室内の何処にユーザがいるか分かる。一方、固定式除菌装置2の紫外線照射部21は、室内の形状と固定式除菌装置2の位置を取得することで、室内のどの場所に紫外線201を照射するか分かる。
Further, as in the second embodiment, depending on the installation position of the fixed
以上のように本実施形態3では、移動式除菌装置(1A、1B)が2台で人Pを検知し、空気中の微粒子の集塵を行い、紫外線照射により室内のウイルスや細菌を分解除菌あるいは不活性化する。また、固定式除菌装置2は、移動式除菌装置(1A、1B)が届かない高所に紫外線照射部21から紫外線を照射しウイルスや細菌を分解除菌あるいは不活性化する。
そのため、室内除菌システム3Aは、1台の場合に比べて人Pの検知と空気の清浄、対象の分解除菌あるいは不活性化にかかる時間が短くなる。また、同じ時間で清浄を行う場合、室内除菌システム3Aは広い部屋の清浄と分解除菌あるいは不活性化に対応できる。
As described above, in the third embodiment, two mobile sterilizers (1A and 1B) detect the human P, collect fine particles in the air, and separate indoor viruses and bacteria by ultraviolet irradiation. Release bacteria or inactivate. Further, the fixed
Therefore, the
実施形態3の室内除菌システム3Aは、2台の移動式除菌手段(1A、1B)と1台の固定式除菌手段(2)とを備えて構成されているが、移動式除菌手段と固定式除菌手段から構成されていれば台数はそれぞれ何台でも良い。
移動式除菌手段と固定式除菌手段とをそれぞれ単数または複数備えることで、部屋の大小に拘わらず、部屋を漏れなく分解除菌あるいは不活性化できる。
対象とする部屋の大きさや除菌にかける時間によって移動式除菌手段と固定式除菌手段の数は適切に設定または選択する必要がある。また、高所の除菌が必要でない場合や設置が困難な場合など、固定式除菌手段(2)を使用せずに複数の移動式除菌手段だけで室内除菌システム3Aを構成しても良い。
The
By providing one or a plurality of mobile sterilizing means and fixed sterilizing means, the room can be completely released or inactivated regardless of the size of the room.
It is necessary to appropriately set or select the number of mobile sterilization means and fixed sterilization means depending on the size of the target room and the time required for sterilization. In addition, when sterilization at a high place is not necessary or installation is difficult, the
以上のように、少なくとも1つの移動式除菌装置(1A、1B)を備えてセンサの検知内容に応じて集塵手段と除菌手段とを切り替える室内除菌システム3Aにより、人Pの有無に限らず室内の微粒子、ウイルスや殺菌を除去あるいは不活化して、室内に居住するユーザが感染症に罹患することを防止できる。
As described above, the presence or absence of a person P is determined by the
<<実施形態4>>
図12に、本発明の実施形態4の移動式除菌装置1Cの模式図である。
本発明の実施形態4の移動式除菌装置1Cについて、図12を用いて説明する。
移動式除菌装置1Cの構成は実施形態1~3の移動式除菌装置1、(1A、1B)の構成と同様である。そこで、実施形態1~3と異なる部分を中心に、実施形態4の移動式除菌装置1Cの構成を以下説明する。
<< Embodiment 4 >>
FIG. 12 is a schematic diagram of the
The
The configuration of the
実施形態4の移動式除菌装置1Cでは、本体1Ch内に集塵部である遠心羽根車14とフィルタ15、制御部110、通信部111、走行駆動部である駆動輪16を備えていることは実施形態1の構造と同一である。
移動式除菌装置1Cでは、紫外線照射部11nを本体1Chの内部に設けている。そして、移動式除菌装置1Cでは、紫外線照射部11nから照射される紫外線101がフィルタ15に集塵された微粒子に照射されることを特徴としている。
In the
In the
そのため、紫外線101が本体1Chの外部に照射されることなく本体1Ch内でウイルスや細菌などの微粒子を分解除菌あるいは不活性化するため、周囲の人Pの有無に関わらず常に除菌手段の紫外線照射部11nを動作させることが可能である。
移動式除菌装置1Cは、壁面に付着して取れない微粒子の除菌はできないが、壁面や床面Yに一旦付着しても接触等で空気中に舞い上がった微粒子については吸気102として吸気口12から吸込まれる。そして、移動式除菌装置1Cの内部では、吸込まれた吸気102がフィルタ15で微粒子が集塵される。そして、移動式除菌装置1Cの排気口13から微粒子を含まない清浄空気103が排気口13から外部に放出される。
Therefore, since the ultraviolet rays 101 do not irradiate the outside of the main body 1Ch and dissociate or inactivate fine particles such as viruses and bacteria in the main body 1Ch, the sterilization means is always used regardless of the presence or absence of the surrounding person P. It is possible to operate the
The
集塵されたウイルスや細菌などの微粒子は移動式除菌装置1Cの内部で紫外線照射部11nから紫外線101を照射されて分解あるいは不活性化される。そのため、移動式除菌装置1Cにおけるフィルタ15の交換時に舞い上がることなく、感染症を予防できる。
The collected fine particles such as viruses and bacteria are decomposed or inactivated by being irradiated with
<<実施形態5>>
図13に、本発明の実施形態5の移動式除菌装置1Dの模式図を示す。
実施形態5の移動式除菌装置1Dは、外部と内部の両方を除菌する構成としている。
移動式除菌装置1Dは、本体1Dhの外部に紫外線101Aを照射する紫外線照射部11Aを本体1Dhの外側に配置している。また、移動式除菌装置1Dは、本体1Dhの内部に紫外線101Bを照射する紫外線照射部11Bを本体1Dhの内部に配置している。
<<
FIG. 13 shows a schematic diagram of the
The
In the
移動式除菌装置1Dは、本体1Dhの外部の壁面や床面Y等に付着している細菌やウイルスを紫外線照射部11Aからの紫外線照射により分解除菌あるいは不活性化する。移動式除菌装置1Dは、同時に外部から集塵してフィルタ15に付着した細菌やウイルスを、本体1Dhの内部の紫外線照射部11Bからの紫外線照射により分解除菌あるいは不活性化することが可能である。
よって、移動式除菌装置1Dは、人検知センサ112により人の存在を検知した場合は内部の紫外線照射部11Bのみを照射する。一方、人が不在の場合、移動式除菌装置1Dは、外部の紫外線照射部11Aと内部の紫外線照射部11Bの両方を駆動することで、人へ健康被害を与えることなく本体1Dh内外に存在する細菌やウイルスを分解除菌あるいは不活性化することが可能である。
The
Therefore, when the
<<その他の実施形態>>
1.前記実施形態では、移動式除菌装置1が人検知センサ112を有する場合を説明したが、人検知センサ112を部屋に設けて、部屋に設けた人検知センサ112の検知内容に応じて、移動式除菌装置1と固定式除菌装置2とが除菌を行う構成としてもよい。
図14に、本発明のその他の実施形態の室内除菌システム3Tのユーザ在室時の動作の概略図を示す。
<< Other Embodiments >>
1. 1. In the above embodiment, the case where the
FIG. 14 shows a schematic diagram of the operation of the indoor sterilization system 3T according to another embodiment of the present invention when the user is in the room.
前記実施形態では、人検知センサ112、112A、112Bを移動式除菌装置1、(1A、1B)に設ける構成を例示したが、これに代えて、図14に示すように、室内除菌システム3Tとして通信手段を有する人検知センサ212を室内に設ける。
人検知センサ212は、通信手段を介して、室内除菌システム3Tを構成する移動式除菌装置1、(1A、1B)と固定式除菌装置2と通信できる。
In the above embodiment, the configuration in which the
The
そして、人検知センサ212の検知情報に基づいて、移動式除菌装置1の紫外線照射部11から紫外線101を照射し、固定式除菌装置2の紫外線照射部21から紫外線201を外部に照射する。
つまり、人検知センサ212の検知により、人が居ない所に移動式除菌装置1の紫外線照射部11から紫外線101を照射し、かつ、人が居ない所に固定式除菌装置2の紫外線照射部21から紫外線201を照射する構成としてもよい。この構成により、人が居ない場所に紫外線101、201を照射できる。
Then, based on the detection information of the
That is, by the detection of the
2.前記実施形態で説明した構成は、本発明の一例であり、特許請求の範囲で記載した範囲内でその他の様々な形態が可能である。 2. 2. The configuration described in the above embodiment is an example of the present invention, and various other embodiments are possible within the scope of the claims.
1、1C、1D 移動式除菌装置
1A 移動式除菌装置(A)(移動式除菌装置)
1B 移動式除菌装置(B)(移動式除菌装置)
2 固定式除菌装置
3、3A、3T 室内除菌システム
11、11n 紫外線照射部(除菌手段)
14 遠心羽根車(集塵手段)
16 駆動輪(移動手段)
21 紫外線照射部(固定除菌手段)
110 制御部(制御手段)
111 通信部(通信手段)
112、112A、112B 人検知センサ(センサ)
212 人検知センサ(室内センサ)
210 制御部(固定制御手段)
211 通信部(固定通信手段)
1,1C, 1D
1B Mobile sterilizer (B) (Mobile sterilizer)
2
14 Centrifugal impeller (dust collecting means)
16 Drive wheels (means of transportation)
21 Ultraviolet irradiation part (fixed sterilization means)
110 Control unit (control means)
111 Communication unit (communication means)
112, 112A, 112B Human detection sensor (sensor)
212 person detection sensor (indoor sensor)
210 Control unit (fixed control means)
211 Communication unit (fixed communication means)
Claims (9)
空気中に浮遊する微粒子を集塵する集塵手段と、
紫外線照射または薬品の散布によりウイルスまたは細菌の少なくとも何れかを分解あるいは不活性化する除菌手段と、
自律走行可能とする移動手段と、
前記センサの検知内容が入力され、前記集塵手段、前記除菌手段、前記移動手段を制御する制御手段を備え、
前記制御手段は、
前記センサの検知内容に応じて、前記集塵手段と前記除菌手段とを切り替えて稼働させる
ことを特徴とする移動式除菌装置。 Sensors that detect people and
A dust collecting means that collects fine particles floating in the air,
A sterilizing means that decomposes or inactivates at least one of viruses or bacteria by irradiation with ultraviolet rays or spraying chemicals.
A means of transportation that enables autonomous driving,
The detection content of the sensor is input, and the dust collecting means, the sterilizing means, and the control means for controlling the moving means are provided.
The control means is
A mobile sterilizing device characterized in that the dust collecting means and the sterilizing means are switched and operated according to the detection content of the sensor.
各前記制御手段は、
それぞれの前記センサの検知内容に応じて、各前記集塵手段と各前記除菌手段とを切り替えて稼働させる
とを特徴とする室内除菌システム。 A plurality of mobile sterilizing devices according to claim 1 are provided.
Each of the control means
An indoor sterilization system characterized in that each of the dust collecting means and each of the sterilizing means are switched and operated according to the detection content of each of the sensors.
ウイルスまたは細菌の少なくとも何れかを分解あるいは不活性化する少なくとも1つの固定除菌手段と前記固定除菌手段を制御する固定制御手段とを備えた固定式除菌装置とを備え、
前記制御手段は、
前記センサの検知内容に応じて、前記集塵手段と前記除菌手段とを切り替えて稼働させる
ことを特徴とする室内除菌システム。 The mobile sterilizing device according to at least one claim 1,
A fixed sterilizing device including at least one fixed sterilizing means for decomposing or inactivating at least one of a virus or a bacterium and a fixed control means for controlling the fixed sterilizing means.
The control means is
An indoor sterilization system characterized in that the dust collecting means and the sterilizing means are switched and operated according to the detection content of the sensor.
前記固定式除菌装置は、前記通信手段と通信を行う固定通信手段を有し、
前記固定制御手段
前記センサの検知内容に応じて、前記固定除菌手段を稼働または非稼働とする
ことを特徴とする請求項3に記載の室内除菌システム。 The mobile sterilizer has a communication means and has a communication means.
The fixed sterilization device has a fixed communication means that communicates with the communication means.
The indoor sterilization system according to claim 3, wherein the fixed control means activates or deactivates the fixed sterilization means according to the detection content of the sensor.
ことを特徴とする請求項3に記載の室内除菌システム。 The indoor sterilization system according to claim 3, wherein the mobile sterilization device and the fixed sterilization device are each one or more.
ことを特徴とする請求項1に記載の移動式除菌装置。 The sterilizing means decomposes or decomposes at least one of the viruses or bacteria existing outside the main body, or at least one of the viruses or bacteria collected inside the main body of the mobile sterilizing device. The mobile sterilizing device according to claim 1, wherein the device is an inactivating device.
ことを特徴とする請求項2または請求項3に記載の室内除菌システム。 The sterilizing means decomposes or decomposes at least one of viruses or bacteria existing outside the main body, or at least one of the viruses or bacteria collected inside the main body of the mobile sterilizing device. The indoor sterilization system according to claim 2 or 3, wherein the device is an inactivating device.
空気中に浮遊する微粒子を集塵する集塵手段と、紫外線照射または薬品の散布によりウイルスまたは細菌の少なくとも何れかを分解あるいは不活性化する除菌手段と、自律走行可能とする移動手段と、通信手段と、前記室内センサの検知内容が入力され、前記集塵手段、前記除菌手段、前記移動手段、前記通信手段を制御する制御手段を備える移動式除菌装置と、
ウイルスまたは細菌の少なくとも何れかを分解あるいは不活性化する少なくとも1つの固定除菌手段と、固定通信手段と、前記固定除菌手段および固定通信手段を制御する固定制御手段とを備えた固定式除菌装置とを具備し、
前記制御手段は、
前記室内センサの検知内容に応じて、前記集塵手段と前記除菌手段とを切り替えて稼働させ、
前記固定制御手段は、
前記室内センサの検知内容に応じて、前記固定除菌手段を稼働または非稼働とする
ことを特徴とする室内除菌システム。 An indoor sensor installed in the room that has a communication unit and detects people,
A dust collecting means for collecting fine particles floating in the air, a sterilizing means for decomposing or inactivating at least one of viruses or bacteria by irradiation with ultraviolet rays or spraying a chemical, and a moving means for enabling autonomous traveling. A mobile sterilizing device provided with a communication means, a dust collecting means, a sterilizing means, a moving means, and a control means for controlling the communication means into which the detection contents of the indoor sensor are input.
Fixed sterilization means comprising at least one fixed sterilization means for degrading or inactivating at least one of a virus or a bacterium, a fixed communication means, and a fixed control means for controlling the fixed sterilization means and the fixed communication means. Equipped with a fungus device,
The control means is
The dust collecting means and the sterilizing means are switched and operated according to the detection content of the indoor sensor.
The fixed control means
An indoor sterilization system characterized in that the fixed sterilization means is activated or deactivated according to the detection content of the indoor sensor.
前記移動式除菌装置では届かない高所に設置されており、前記固定式除菌装置の除菌対象範囲と前記移動式除菌装置の除菌対象範囲は重なっていないことを特徴とする請求項8に記載の室内除菌システム。 The fixed sterilization device is
The claim is characterized in that it is installed in a high place that cannot be reached by the mobile sterilization device, and the sterilization target range of the fixed sterilization device and the sterilization target range of the mobile sterilization device do not overlap. Item 8. The indoor sterilization system according to Item 8.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020138905A JP7564661B2 (en) | 2020-08-19 | 2020-08-19 | Mobile disinfection equipment and indoor disinfection systems |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020138905A JP7564661B2 (en) | 2020-08-19 | 2020-08-19 | Mobile disinfection equipment and indoor disinfection systems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022034951A true JP2022034951A (en) | 2022-03-04 |
| JP7564661B2 JP7564661B2 (en) | 2024-10-09 |
Family
ID=80443209
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020138905A Active JP7564661B2 (en) | 2020-08-19 | 2020-08-19 | Mobile disinfection equipment and indoor disinfection systems |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7564661B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023233637A1 (en) * | 2022-06-02 | 2023-12-07 | 三菱電機株式会社 | Ozone sterilization system and ozone sterilization method |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09509340A (en) * | 1993-12-22 | 1997-09-22 | クレアン エー/エス | Cleaning equipment including filters and UV radiation |
| JP2012135325A (en) * | 2009-04-28 | 2012-07-19 | Panasonic Corp | Air purifying system and indoor air purifying method |
| WO2013051365A1 (en) * | 2011-10-07 | 2013-04-11 | シャープ株式会社 | Self-propelled ion generator and cleaning robot |
| JP2017530777A (en) * | 2014-09-18 | 2017-10-19 | ゼネックス・ディスインフェクション・サービシィズ・エルエルシイ | Disinfection of rooms and regions using pulsed light with modulated power flux and optical system with visible light compensation between pulses |
| JP2017533810A (en) * | 2014-11-10 | 2017-11-16 | デイライト メディカル,インク. | Decontamination apparatus and method |
| JP2018130131A (en) * | 2017-02-13 | 2018-08-23 | エネフォレスト株式会社 | Inner sterilizing apparatus |
| JP2019032256A (en) * | 2017-08-09 | 2019-02-28 | 西村 公宏 | Pollution detection system and automatic cleaning system |
| CN111317836A (en) * | 2020-03-05 | 2020-06-23 | 上海飒智智能科技有限公司 | Multifunctional intelligent mobile disinfection robot |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015105211A1 (en) | 2015-04-07 | 2016-10-13 | Vorwerk & Co. Interholding Gmbh | Process for working a soil |
-
2020
- 2020-08-19 JP JP2020138905A patent/JP7564661B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09509340A (en) * | 1993-12-22 | 1997-09-22 | クレアン エー/エス | Cleaning equipment including filters and UV radiation |
| JP2012135325A (en) * | 2009-04-28 | 2012-07-19 | Panasonic Corp | Air purifying system and indoor air purifying method |
| WO2013051365A1 (en) * | 2011-10-07 | 2013-04-11 | シャープ株式会社 | Self-propelled ion generator and cleaning robot |
| JP2017530777A (en) * | 2014-09-18 | 2017-10-19 | ゼネックス・ディスインフェクション・サービシィズ・エルエルシイ | Disinfection of rooms and regions using pulsed light with modulated power flux and optical system with visible light compensation between pulses |
| JP2017533810A (en) * | 2014-11-10 | 2017-11-16 | デイライト メディカル,インク. | Decontamination apparatus and method |
| JP2018130131A (en) * | 2017-02-13 | 2018-08-23 | エネフォレスト株式会社 | Inner sterilizing apparatus |
| JP2019032256A (en) * | 2017-08-09 | 2019-02-28 | 西村 公宏 | Pollution detection system and automatic cleaning system |
| CN111317836A (en) * | 2020-03-05 | 2020-06-23 | 上海飒智智能科技有限公司 | Multifunctional intelligent mobile disinfection robot |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023233637A1 (en) * | 2022-06-02 | 2023-12-07 | 三菱電機株式会社 | Ozone sterilization system and ozone sterilization method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7564661B2 (en) | 2024-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20080056933A1 (en) | Self-Propelled Sterilization Robot and Method | |
| EP3434986A1 (en) | Air purification device and air purification system | |
| US5233723A (en) | Sterilizing vacuum cleaner | |
| CN102987990A (en) | Intelligent robot with various cleaning functions | |
| JP2005040576A (en) | Robot vacuum cleaner equipped with air purifying function and system thereof | |
| CN111905135A (en) | Sterilizing device based on artificial intelligence disinfection robot | |
| CN113280445A (en) | Indoor air purification and sterilization robot and sterilization method | |
| JP7564661B2 (en) | Mobile disinfection equipment and indoor disinfection systems | |
| KR102341395B1 (en) | Movable Air Purifier | |
| KR101615666B1 (en) | Antifungal robot cleaner for healthcare | |
| KR20150103836A (en) | Cleaner having sterilization function | |
| KR100548894B1 (en) | an robot-cleaner equipped with perfume-sprinkling function | |
| KR102428301B1 (en) | Disinfection Robot | |
| JP2022109461A (en) | Mobile sterilization device and sterilization method | |
| CN217503905U (en) | Disinfection robot | |
| WO2022043856A1 (en) | 3-in-1 cleaning robot | |
| JP7148156B2 (en) | Environmental sterilizer | |
| CN213994318U (en) | All-weather disinfection robot | |
| EP4035694A1 (en) | A floor cleaning and disinfecting assembly | |
| JP5393250B2 (en) | Isolation chamber forming device | |
| CN111569134A (en) | Air purification microwave sterilizer and air purification microwave sterilization method | |
| CN113805582A (en) | Cleaning and disinfecting robot and control method and control device thereof | |
| KR20190134151A (en) | Air cleaning system using image recognition technology | |
| JPH08131522A (en) | Sterilizing device | |
| JP7555307B2 (en) | Mobile cleaning device and cleaning method using the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240514 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240709 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240927 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7564661 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |