JP2022015733A - Fatigue state determination method, learning model generation method, fatigue state determination system, fatigue state determination device, and computer program - Google Patents
Fatigue state determination method, learning model generation method, fatigue state determination system, fatigue state determination device, and computer program Download PDFInfo
- Publication number
- JP2022015733A JP2022015733A JP2020118768A JP2020118768A JP2022015733A JP 2022015733 A JP2022015733 A JP 2022015733A JP 2020118768 A JP2020118768 A JP 2020118768A JP 2020118768 A JP2020118768 A JP 2020118768A JP 2022015733 A JP2022015733 A JP 2022015733A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- state
- angular velocity
- geomagnetism
- fatigue
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 80
- 238000004590 computer program Methods 0.000 title claims abstract description 23
- 230000001133 acceleration Effects 0.000 claims abstract description 244
- 210000003141 lower extremity Anatomy 0.000 claims abstract description 121
- 210000002683 foot Anatomy 0.000 claims description 96
- 230000003183 myoelectrical effect Effects 0.000 claims description 84
- 230000008569 process Effects 0.000 claims description 31
- 238000012549 training Methods 0.000 claims description 20
- 230000005856 abnormality Effects 0.000 claims description 16
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 claims description 5
- 230000009471 action Effects 0.000 claims description 3
- 230000005389 magnetism Effects 0.000 abstract 3
- 238000004364 calculation method Methods 0.000 description 94
- 239000013598 vector Substances 0.000 description 54
- 238000004891 communication Methods 0.000 description 28
- 238000010586 diagram Methods 0.000 description 22
- 230000008859 change Effects 0.000 description 19
- 230000006870 function Effects 0.000 description 18
- 230000006835 compression Effects 0.000 description 17
- 238000007906 compression Methods 0.000 description 17
- 238000005259 measurement Methods 0.000 description 13
- 238000012545 processing Methods 0.000 description 11
- 239000011159 matrix material Substances 0.000 description 9
- 238000013528 artificial neural network Methods 0.000 description 8
- 210000003205 muscle Anatomy 0.000 description 7
- 238000004458 analytical method Methods 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 239000000284 extract Substances 0.000 description 5
- 206010049565 Muscle fatigue Diseases 0.000 description 4
- 230000000415 inactivating effect Effects 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 0 SCCC(C1)C2C34*1C(CC1C(CC5C6)C5C6C1)CC3CCC4CC2 Chemical compound SCCC(C1)C2C34*1C(CC1C(CC5C6)C5C6C1)CC3CCC4CC2 0.000 description 2
- 230000036982 action potential Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000013527 convolutional neural network Methods 0.000 description 2
- 230000010365 information processing Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 210000003371 toe Anatomy 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005021 gait Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000002779 inactivation Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 238000007637 random forest analysis Methods 0.000 description 1
- 230000000306 recurrent effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000012706 support-vector machine Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images














Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Abstract
Description
本発明は、下肢の疲労の有無を判定する疲労状態判定方法、学習モデル生成方法、疲労状態判定システム、疲労状態判定装置、及びコンピュータプログラムに関する。 The present invention relates to a fatigue state determination method for determining the presence or absence of fatigue in the lower limbs, a learning model generation method, a fatigue state determination system, a fatigue state determination device, and a computer program.
疲労は健康に悪影響を及ぼし、事故又は疾患の原因となり得る。しかし、人が疲労を正確に自覚することは困難である。そこで、客観的に人の疲労を判定する技術が求められる。例えば、筋電計で測定される筋電位を利用する方法が知られている。筋電位の周波数解析を行うことにより得られる平均周波数又は中間周波数は、筋肉が疲労するに従って、値が低下していく。このため、筋電位の平均周波数又は中間周波数に基づいて筋肉の疲労を判定することができる。特許文献1には、筋電位を測定し、筋電位に基づいて筋肉の疲労を判定する技術の例が開示されている。 Fatigue adversely affects health and can cause accidents or illness. However, it is difficult for a person to be aware of fatigue accurately. Therefore, a technique for objectively determining human fatigue is required. For example, a method using a myoelectric potential measured by an electromyogram is known. The average frequency or the intermediate frequency obtained by performing the frequency analysis of the myoelectric potential decreases as the muscle becomes tired. Therefore, muscle fatigue can be determined based on the average frequency or the intermediate frequency of the myoelectric potential. Patent Document 1 discloses an example of a technique for measuring a myoelectric potential and determining muscle fatigue based on the myoelectric potential.
筋電位を利用する技術では、筋電計を人体に装着する必要がある。しかしながら、人体に筋電計を長時間装着し続けることは容易ではなく、人体に負担をもたらす。そこで、より容易に疲労を推定する技術が求められる。また、歩行等の下肢の疲労を伴う動作は、人が日常的に行う動作であり、下肢の疲労は日常的に発生する。下肢の疲労の発生又は回復を簡便に判定できれば、日常的な疲労の推定に役立てることができる。 In the technology using myoelectric potential, it is necessary to attach an electromyogram to the human body. However, it is not easy to keep the EMG attached to the human body for a long time, which causes a burden on the human body. Therefore, a technique for estimating fatigue more easily is required. In addition, movements accompanied by fatigue of the lower limbs such as walking are movements that a person performs on a daily basis, and fatigue of the lower limbs occurs on a daily basis. If the occurrence or recovery of fatigue in the lower limbs can be easily determined, it can be useful for estimating daily fatigue.
本発明は、斯かる事情に鑑みてなされたものであって、その目的とするところは、加速度センサを用いて、下肢の疲労の有無を判定する疲労状態判定方法、学習モデル生成方法、疲労状態判定システム、疲労状態判定装置、及びコンピュータプログラムを提供することにある。 The present invention has been made in view of such circumstances, and an object thereof is a fatigue state determination method for determining the presence or absence of fatigue in the lower limbs, a learning model generation method, and a fatigue state using an acceleration sensor. It is an object of the present invention to provide a determination system, a fatigue state determination device, and a computer program.
本発明に係る疲労状態判定方法は、人の足に装着されたセンサにより、歩行中の加速度、角速度及び地磁気を繰り返し測定し、人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に、前記人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力する学習モデルへ、前記センサにより測定された加速度、角速度及び地磁気の履歴を入力し、前記学習モデルが出力した前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定することを特徴とする。 The fatigue state determination method according to the present invention is a case where the acceleration, angular velocity and geomagnetism during walking are repeatedly measured by a sensor mounted on a human foot, and the history of acceleration, angular velocity and geomagnetism during walking of a person is input. , The history of acceleration, angular velocity and geomagnetism measured by the sensor to a learning model that outputs information indicating whether the person's state is before or after performing a motion accompanied by fatigue of the lower limbs. It is characterized in that it determines whether the state of the person who wears the sensor on the foot is the state before or after the operation according to the input and the information output by the learning model. ..
本発明に係る疲労状態判定方法では、前記学習モデルは、人の歩行中の加速度、角速度及び地磁気の履歴と、前記人の足から得られた筋電位の特徴量とを入力された場合に、前記人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力するように、学習されており、人の足から得られた筋電位の特徴量が入力されず、前記人の歩行中の加速度、角速度及び地磁気の履歴が入力された場合に、前記人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力することを特徴とする。 In the fatigue state determination method according to the present invention, when the learning model is input with the history of acceleration, angular velocity and geomagnetism during walking of a person, and the characteristic amount of myoelectric potential obtained from the foot of the person. Characteristics of myoelectric potential obtained from a person's foot, which has been learned to output information indicating whether the person's state is a state before or after performing a motion accompanied by fatigue of the lower limbs. When the amount is not input and the acceleration, angular velocity, and geomagnetic history of the person during walking are input, the state of the person is the state before or after the movement accompanied by the fatigue of the lower limbs. It is characterized by outputting information indicating the above.
本発明に係る疲労状態判定方法は、前記センサにより、前記センサに対して固定された軸に沿った方向の加速度、角速度及び地磁気を測定し、前記軸の姿勢角を、加速度、角速度又は地磁気の履歴に基づいて計算し、前記姿勢角に基づいて、加速度、角速度及び地磁気を補正することを特徴とする。 In the fatigue state determination method according to the present invention, the sensor measures acceleration, angular velocity, and geomagnetism in a direction along an axis fixed to the sensor, and the attitude angle of the axis is determined by acceleration, angular velocity, or geomagnetism. It is characterized by calculating based on history and correcting acceleration, angular velocity and geomagnetism based on the attitude angle.
本発明に係る疲労状態判定方法は、前記センサにより、前記センサに対して固定された軸に沿った方向の加速度、角速度及び地磁気を測定し、加速度、角速度及び地磁気を測定した夫々の時点における、地面に対して固定された軸に対する前記センサに対して固定された軸の姿勢角を、加速度、角速度及び地磁気の履歴に基づいて計算し、前記姿勢角に基づいて、前記センサに対して固定された軸に沿った方向の加速度、角速度及び地磁気を、地面に対して固定された軸に沿った方向の加速度、角速度及び地磁気へ変換し、変換後の加速度、角速度及び地磁気を前記学習モデルへ入力することを特徴とする。 In the fatigue state determination method according to the present invention, the acceleration, the angular velocity and the geomagnetism in the direction along the axis fixed to the sensor are measured by the sensor, and the acceleration, the angular velocity and the geomagnetism are measured at each time point. The attitude angle of the axis fixed to the sensor with respect to the axis fixed to the ground is calculated based on the history of acceleration, angular velocity and geomagnetism, and is fixed to the sensor based on the attitude angle. The acceleration, angular velocity and geomagnetism in the direction along the axis are converted into the acceleration, angular velocity and geomagnetism in the direction along the axis fixed to the ground, and the converted acceleration, angular velocity and geomagnetism are input to the learning model. It is characterized by doing.
本発明に係る疲労状態判定方法では、前記学習モデルは、同じ足による一歩行の期間における加速度、角速度及び地磁気の履歴を入力した場合に前記情報を出力するモデルであり、前記センサにより繰り返し測定された加速度、角速度及び地磁気の中から、一歩行の期間に測定された加速度、角速度及び地磁気の履歴を抽出し、抽出した加速度、角速度及び地磁気の履歴を前記学習モデルへ入力することを特徴とする。 In the fatigue state determination method according to the present invention, the learning model is a model that outputs the information when the history of acceleration, angular velocity, and geomagnetism in one walking period with the same foot is input, and is repeatedly measured by the sensor. It is characterized in that the history of acceleration, angular velocity and geomagnetism measured during one walking period is extracted from the acceleration, angular velocity and geomagnetism, and the extracted acceleration, angular velocity and geomagnetism history are input to the learning model. ..
本発明に係る疲労状態判定方法は、上下方向の加速度の変化、及び前後方向の揺れに対応する角速度の変化に基づいて、前記センサの装着された足が接地した時点を特定し、前記足が接地した時点から次に前記足が接地した時点までの期間に測定された加速度、角速度及び地磁気の履歴を、一歩行の期間に測定された加速度、角速度及び地磁気の履歴として抽出することを特徴とする。 In the fatigue state determination method according to the present invention, the time when the foot to which the sensor is attached touches the ground is specified based on the change in the acceleration in the vertical direction and the change in the angular velocity corresponding to the shaking in the front-back direction, and the foot touches the ground. It is characterized by extracting the history of acceleration, angular velocity and geomagnetism measured during the period from the time when the foot touches the ground to the time when the foot touches the ground as the history of acceleration, angular velocity and geomagnetism measured during one walking period. do.
本発明に係る疲労状態判定方法は、複数の一歩行の期間の夫々において測定された加速度、角速度及び地磁気の履歴を、個別に前記学習モデルへ入力し、複数の一歩行の期間について前記学習モデルが出力した複数の前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定することを特徴とする。 In the fatigue state determination method according to the present invention, the history of acceleration, angular velocity, and geomagnetism measured in each of a plurality of walking periods is individually input to the learning model, and the learning model is used for the plurality of walking periods. It is characterized in that it is determined whether the state of the person who wears the sensor on the foot is the state before or after the operation according to the plurality of the information output by the user.
本発明に係る学習モデル生成方法は、下肢の疲労を伴う動作を行う前の人の足に装着されたセンサにより一歩行の期間に測定された加速度、角速度及び地磁気の履歴、並びに前記人の足から得られた筋電位の特徴量を作成し、前記動作を行った後の人の足に装着されたセンサにより一歩行の期間に測定された加速度、角速度及び地磁気の履歴、並びに前記人の足から得られた筋電位の特徴量を作成し、複数の一歩行の期間の夫々において測定された加速度、角速度及び地磁気の履歴と、筋電位の特徴量と、人の状態が前記動作を行う前の状態であるか後の状態であるかを示す情報とを訓練データとして、人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に前記人の状態が前記動作を行う前の状態であるか後の状態であるかを示す情報を出力する学習モデルを、生成することを特徴とする。 The learning model generation method according to the present invention includes acceleration, angular velocity, and geomagnetic history measured during one walk by a sensor attached to a person's foot before performing a motion accompanied by fatigue of the lower limbs, and the person's foot. Acceleration, angular velocity and geomagnetic history measured during one walk by a sensor attached to a person's foot after performing the above motion, and the history of the person's foot, as well as the history of acceleration, angular velocity and geomagnetism obtained from The myoelectricity feature amount obtained from the above was created, and the acceleration, angular velocity, and geomagnetic history measured in each of the plurality of gait periods, the myoelectricity feature amount, and the human state before performing the above-mentioned movement. When the history of acceleration, angular velocity, and geomagnetism during walking of a person is input as training data with information indicating whether the state is the state of the person or the state after the state of the person, the state of the person before the operation is performed. It is characterized by generating a learning model that outputs information indicating whether it is in a certain state or a later state.
本発明に係る学習モデル生成方法は、下肢の疲労を伴う動作を行う前の人の足に装着されたセンサにより一歩行の期間に測定された加速度、角速度及び地磁気の履歴を作成し、複数の一歩行の期間の夫々において測定された加速度、角速度及び地磁気の履歴を訓練データとした教師無し学習によって、人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に、前記人の状態が前記動作を行う前の状態であるか後の状態であるかを示す情報として、前記人の状態の異常の程度を示す情報を出力する学習モデルを、生成することを特徴とする。 The learning model generation method according to the present invention creates a plurality of history of acceleration, angular velocity, and geomagnetism measured during one walking by a sensor attached to a person's foot before performing a motion accompanied by fatigue of the lower limbs. When the history of acceleration, angular velocity and geomagnetism during walking of a person is input by unsupervised learning using the history of acceleration, angular velocity and geomagnetism measured in each walking period as training data, the state of the person is changed. It is characterized by generating a learning model that outputs information indicating the degree of abnormality of the person's state as information indicating whether the state is before or after the operation.
本発明に係る疲労状態判定システムは、人の足に装着され、前記人の歩行中の加速度、角速度及び地磁気を繰り返し測定するセンサと、前記センサを足に装着した人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する疲労状態判定装置とを備え、前記疲労状態判定装置は、人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に、前記人の状態が前記動作を行う前の状態であるか後の状態であるかを示す情報を出力する学習モデルを備え、前記センサが測定した加速度、角速度及び地磁気を取得し、取得した加速度、角速度及び地磁気の履歴を前記学習モデルへ入力した場合に前記学習モデルが出力する前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定することを特徴とする。 The fatigue state determination system according to the present invention is a sensor that is attached to a person's foot and repeatedly measures acceleration, angular velocity, and geomagnetism during walking of the person, and the state of the person who wears the sensor on the foot causes fatigue of the lower limbs. The fatigue state determination device is provided with a fatigue state determination device for determining whether the state is before or after the accompanying operation, and the fatigue state determination device inputs the history of acceleration, angular velocity, and geomagnetism during walking of a person. In addition, a learning model is provided which outputs information indicating whether the state of the person is a state before or after the operation, and the acceleration, angular velocity, and geomagnetism measured by the sensor are acquired and acquired. Whether the state of the person wearing the sensor on the foot is the state before the operation is performed according to the information output by the learning model when the history of acceleration, angular velocity, and geomagnetism is input to the learning model. It is characterized in that it is determined whether or not it is in the state of.
本発明に係る疲労状態判定装置は、人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に、前記人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力する学習モデルを備え、人の足に装着されたセンサにより測定された歩行中の加速度、角速度及び地磁気を取得し、取得した加速度、角速度及び地磁気の履歴を前記学習モデルへ入力した場合に前記学習モデルが出力する前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定することを特徴とする。 The fatigue state determination device according to the present invention is a state before or after the person's state is a state before performing an operation accompanied by fatigue of the lower limbs when the history of acceleration, angular velocity and geomagnetism during walking of the person is input. It is equipped with a learning model that outputs information indicating whether or not it is, and acquires acceleration, angular velocity, and geomagnetism during walking measured by a sensor mounted on a human foot, and learns the acquired acceleration, angular velocity, and geomagnetism history. According to the information output by the learning model when input to the model, it is determined whether the state of the person wearing the sensor on the foot is the state before or after the operation. It is a feature.
本発明に係るコンピュータプログラムは、人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に、前記人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力する学習モデルへ、人の足に装着されたセンサにより測定された歩行中の加速度、角速度及び地磁気の履歴を入力し、前記学習モデルが出力する前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定する処理をコンピュータに実行させることを特徴とする。 The computer program according to the present invention is a state before or after the state of the person performing an operation accompanied by fatigue of the lower limbs when the history of acceleration, angular velocity and geomagnetism during walking of the person is input. The history of acceleration, angular velocity, and geomagnetism during walking measured by a sensor mounted on a human foot is input to a learning model that outputs information indicating the above, and the above information is output according to the information output by the learning model. It is characterized in that a computer is made to execute a process of determining whether the state of a person wearing a sensor on his / her foot is a state before or after the operation.
本発明においては、人の足に装着されたセンサは、歩行中の加速度、角速度及び地磁気を測定し、加速度、角速度及び地磁気の履歴が学習モデルへ入力される。学習モデルは、加速度、角速度及び地磁気の履歴を入力された場合に、センサを足に装着した人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力するように、学習されている。下肢の疲労を伴う動作の前後では、疲労の影響によって加速度、角速度及び地磁気が変化する。このため、適切に学習された学習モデルを利用することによって、センサを足に装着した人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを、簡便に判定することができる。 In the present invention, the sensor mounted on the human foot measures the acceleration, the angular velocity and the geomagnetism during walking, and the history of the acceleration, the angular velocity and the geomagnetism is input to the learning model. The learning model shows whether the state of the person wearing the sensor on the foot is the state before or after the movement with fatigue of the lower limbs when the history of acceleration, angular velocity and geomagnetism is input. It is learned to output information. Acceleration, angular velocity, and geomagnetism change due to the effects of fatigue before and after movements involving fatigue of the lower limbs. Therefore, by using a properly trained learning model, it is easy to determine whether the state of the person wearing the sensor on the foot is the state before or after the movement accompanied by the fatigue of the lower limbs. It can be determined.
本発明の一形態においては、学習モデルは、学習時には、歩行中の加速度、角速度及び地磁気の履歴と筋電位の特徴量とを入力された場合に、人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力するように、学習される。学習時には、筋電位の特徴量に関わるノードを確率的に不活性化することにより、筋電位の特徴量が入力されない場合にも適切な判定を行うことができるように、学習を行う。疲労状態の判定時には、学習モデルは、筋電位の特徴量が入力されず、加速度、角速度及び地磁気の履歴が入力された場合に、人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力する。筋電位の特徴量をも利用した学習により、学習モデルが適切に学習される。疲労状態の判定時には、筋電位の特徴量を用いずに判定を行うことにより、人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを簡便に判定することができる。 In one embodiment of the present invention, in the learning model, when the acceleration, the angular velocity, the geomagnetic history and the feature amount of the myoelectric potential during walking are input, the human state moves with the fatigue of the lower limbs. It is learned to output information indicating whether the state is before or after the operation. At the time of learning, by probabilistically inactivating the node related to the feature amount of myoelectric potential, learning is performed so that an appropriate determination can be made even when the feature amount of myoelectric potential is not input. At the time of determining the fatigue state, the learning model is in the state before the human state performs the movement accompanied by the fatigue of the lower limbs when the feature amount of the myoelectric potential is not input and the history of acceleration, angular velocity and geomagnetism is input. Outputs information indicating whether the state is present or later. The learning model is properly learned by learning using the feature amount of the myoelectric potential. When determining the fatigue state, it is possible to easily determine whether the human state is a state before or after performing an operation accompanied by fatigue of the lower limbs by performing the judgment without using the feature amount of the myoelectric potential. be able to.
本発明の一形態においては、人の足に装着されたセンサは、センサに対して固定された軸に沿った方向の加速度、角速度及び地磁気を測定する。加速度、角速度又は地磁気の時間変化に基づいて、センサに対して固定された軸の姿勢角が計算され、姿勢角に基づいて加速度、角速度及び地磁気が補正される。例えば、地面に対して固定された軸に対するセンサに対して固定された軸の姿勢角が計算される。姿勢角に基づいて、加速度、角速度及び地磁気は、地面に対して固定された軸の方向の加速度、角速度及び地磁気へ変換され、変換された加速度、角速度及び地磁気が学習モデルへ入力される。加速度、角速度及び地磁気の補正により、センサが移動することによる影響が除去され、歩行の影響が明確になる。このため、人の状態の正確な判定が可能となる。 In one embodiment of the invention, a sensor mounted on a human foot measures acceleration, angular velocity and geomagnetism in a direction along an axis fixed to the sensor. The attitude angle of the axis fixed to the sensor is calculated based on the time change of acceleration, angular velocity or geomagnetism, and the acceleration, angular velocity and geomagnetism are corrected based on the attitude angle. For example, the attitude angle of the fixed axis with respect to the sensor with respect to the fixed axis with respect to the ground is calculated. Based on the attitude angle, the acceleration, angular velocity and geomagnetism are converted into acceleration, angular velocity and geomagnetism in the direction of the axis fixed with respect to the ground, and the converted acceleration, angular velocity and geomagnetism are input to the learning model. Acceleration, angular velocity and geomagnetic correction eliminate the effects of sensor movement and clarify the effects of walking. Therefore, it is possible to accurately determine the state of a person.
本発明の一形態においては、同じ足による一歩行の期間における加速度、角速度及び地磁気の履歴が学習モデルへ入力され、人の状態が判定される。一歩行の期間には、片足による周期的な動作の中の一周期に相当する動作が行われ、加速度、角速度及び地磁気の履歴は、歩行の特徴を反映する。このため、一歩行の期間における加速度、角速度及び地磁気の履歴に基づいて、人の状態を判定することができる。 In one embodiment of the present invention, the history of acceleration, angular velocity, and geomagnetism during one walking with the same foot is input to the learning model, and the state of the person is determined. During the period of one walk, the movement corresponding to one cycle in the periodic movement by one foot is performed, and the history of acceleration, angular velocity and geomagnetism reflects the characteristics of walking. Therefore, the state of a person can be determined based on the history of acceleration, angular velocity, and geomagnetism during one walking period.
本発明の一形態においては、加速度及び角速度の変化に基づいて、足が接地した時点が特定され、足が接地した時点から次に接地した時点までの期間を一歩行の期間として、一歩行の期間における加速度、角速度及び地磁気の履歴が得られる。足が接地する前後で、上下方向の加速度、及び前後方向の揺れに対応する角速度は大きく変化するので、足が接地した時点を特定することが可能である。 In one embodiment of the present invention, the time point at which the foot touches the ground is specified based on the changes in acceleration and angular velocity, and the period from the time when the foot touches the ground to the time when the foot touches the next touches is set as the period of one walk. History of acceleration, angular velocity and geomagnetism over the period is obtained. Since the angular velocity corresponding to the vertical acceleration and the front-back sway changes greatly before and after the foot touches the ground, it is possible to specify the time point when the foot touches the ground.
本発明の一形態においては、複数の一歩行の期間の夫々について、加速度、角速度及び地磁気の履歴を個別に学習モデルへ入力し、学習モデルが出力した複数の情報に基づいて、人の状態が判定される。学習モデルが出力した複数の情報を利用することにより、より正確な判定が可能となる。 In one embodiment of the present invention, the acceleration, angular velocity, and geomagnetic history are individually input to the learning model for each of the plurality of walking periods, and the state of the person is determined based on the plurality of information output by the learning model. It is judged. By using a plurality of information output by the learning model, more accurate judgment becomes possible.
本発明の一形態においては、下肢の疲労を伴う動作を行う前に得られた加速度、角速度及び地磁気の履歴並びに筋電位の特徴量と、下肢の疲労を伴う動作を行った後に得られた加速度、角速度及び地磁気の履歴並びに筋電位の特徴量とを含む訓練データを用いて、学習モデルを生成する。下肢の疲労を伴う動作の前に得られたデータと下肢の疲労を伴う動作の後に得られたデータとを訓練データに用いて学習モデルの学習を行うことにより、人の状態を示す情報を正しく出力できるように適切に学習された学習モデルを生成することができる。また、加速度、角速度及び地磁気に加えて筋電位の特徴量を利用して学習モデルの学習を行うことにより、正確な判定が可能であるように学習モデルを学習することができる。 In one embodiment of the present invention, the acceleration, angular velocity, geomagnetic history, and myoelectric potential features obtained before performing the motion with fatigue of the lower limbs, and the acceleration obtained after performing the motion with fatigue of the lower limbs. A training model is generated using training data including angular velocity, geomagnetic history, and myoelectric potential features. By learning a learning model using the data obtained before the movement with fatigue of the lower limbs and the data obtained after the movement with fatigue of the lower limbs as training data, the information indicating the human condition can be correctly obtained. A properly trained learning model can be generated for output. Further, by learning the learning model using the features of the myoelectric potential in addition to the acceleration, the angular velocity, and the geomagnetism, the learning model can be learned so that an accurate determination can be made.
本発明の一形態においては、学習モデルは、人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報として、人の状態の異常の程度を示す情報を出力する。学習モデルでは、下肢の疲労を伴う動作を行う前に得られた加速度、角速度及び地磁気の履歴を訓練データとした教師無し学習により、学習される。訓練データとして、下肢の疲労を伴う動作の後に得られたデータを用意する必要が無いので、容易に訓練データを作成し、学習モデルを生成することができる。 In one embodiment of the present invention, the learning model indicates the degree of abnormality in the human condition as information indicating whether the human condition is a state before or after performing a movement accompanied by fatigue of the lower limbs. Output information. In the learning model, learning is performed by unsupervised learning using the history of acceleration, angular velocity, and geomagnetism obtained before performing a motion accompanied by fatigue of the lower limbs as training data. Since it is not necessary to prepare the data obtained after the movement accompanied by the fatigue of the lower limbs as the training data, the training data can be easily created and the learning model can be generated.
本発明は、人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを簡便に判定することができる等、優れた効果を奏する。 INDUSTRIAL APPLICABILITY The present invention has excellent effects such as being able to easily determine whether a person's state is a state before or after performing an operation accompanied by fatigue of the lower limbs.
以下本発明をその実施の形態を示す図面に基づき具体的に説明する。
<実施形態1>
図1は、実施形態1に係る疲労状態判定システム100の構成例を示す模式図である。疲労状態判定システム100は、使用者4の疲労状態として、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定するためのシステムである。疲労状態判定システム100は、疲労状態判定方法を実行する。疲労状態判定システム100は、センサ装置3と、端末装置2と、疲労状態判定装置1とを備えている。
Hereinafter, the present invention will be specifically described with reference to the drawings showing the embodiments thereof.
<Embodiment 1>
FIG. 1 is a schematic diagram showing a configuration example of the fatigue
センサ装置3は、使用者4の足に装着され、使用者4の歩行時の物理量を測定する。センサ装置3は、データを端末装置2へ送信する。端末装置2は、センサ装置3から送信されたデータを受信し、インターネット等の通信ネットワーク5を介して疲労状態判定装置1と通信を行う。疲労状態判定装置1は、通信ネットワーク5に接続されている。疲労状態判定装置1は、センサ装置3での測定結果に基づいて、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する処理を行う。
The
本実施形態では、使用者4の疲労状態として、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか、又は行った後の状態であるかを判定する。筋肉が疲労するに従って、筋電位の中間周波数及び平均周波数が低周波側へ移行する徐波化が発生することが知られている。下肢の疲労を伴う動作は、下肢の筋電位に徐波化が認められるような、下肢に疲労が発生する程度の強度の動作である。下肢の疲労を伴う動作は、下肢に疲労が発生する程度の強度の動作であれば、どのような動作をも含む。下肢の疲労を伴う動作を行う前の状態とは、下肢の疲労を伴う動作を行っていない状態、及び動作による疲労が回復した状態を含む。下肢の疲労を伴う動作を行った後の状態とは、下肢の疲労を伴う動作を行い、まだ疲労が回復していない状態である。使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定することにより、使用者4の下肢の疲労及び疲労回復の状態を判定することができる。
In the present embodiment, as the fatigue state of the
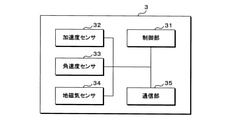
図2は、センサ装置3の内部の構成例を示すブロック図である。センサ装置3は、制御部31と、加速度を測定する加速度センサ32と、角速度を測定する角速度センサ33と、地磁気を測定する地磁気センサ34と、通信部35とを備える。制御部31は、センサ装置3の各部分を制御する。加速度センサ32、角速度センサ33及び地磁気センサ34は、いずれも三軸センサである。即ち、加速度センサ32、角速度センサ33及び地磁気センサ34は、加速度、角速度及び地磁気について、センサ装置3に対して固定された互いに直交する三つの軸の夫々に沿った方向の成分を測定する。加速度センサ32、角速度センサ33及び地磁気センサ34は、三軸が一致していることが望ましい。
FIG. 2 is a block diagram showing an example of the internal configuration of the
通信部35は、角速度センサ33及び地磁気センサ34が測定した加速度、角速度及び地磁気の値を含むデータを、無線通信により、センサ装置3の外部へ送信する。制御部31は、加速度、角速度及び地磁気の値を含むデータを、通信部35に、端末装置2へ送信させる。加速度センサ32、角速度センサ33及び地磁気センサ34は、加速度、角速度及び地磁気を繰り返し測定する。
The
センサ装置3は、ベルトが取り付けられ、ベルトが使用者4の足に巻回され、ベルトに設けられた面ファスナによりベルトが固定されることによって、使用者4の足に装着される。又は、センサ装置3は、面ファスナが設けられており、面ファスナによって使用者4の衣服に固定されてもよい。センサ装置3は、袋に収納され、ベルト、面ファスナ又はボタン等の固定具によって袋が使用者4の足に固定されることによって、使用者4の足に装着されてもよい。センサ装置3は、使用者4の衣服のポケット等の収納部に収納されることによって、使用者4の足に装着されてもよい。センサ装置3は、使用者4の靴下又は靴に取り付けられてもよい。
The
図3は、端末装置2の内部の構成例を示すブロック図である。端末装置2は、スマートフォン又はタブレット型コンピュータ等、携帯型のコンピュータである。例えば、端末装置2は、使用者4の所有物である。端末装置2は、演算部21と、メモリ22と、記憶部23と、操作部24と、表示部25と、通信部26とを備えている。演算部21は、例えばCPU(Central Processing Unit )、GPU(Graphics Processing Unit)、又はマルチコアCPUを用いて構成されている。演算部21は、量子コンピュータを用いて構成されていてもよい。メモリ22は、演算に伴って発生する一時的なデータを記憶する。メモリ22は、例えばRAM(Random Access Memory)である。記憶部23は、不揮発性であり、例えばハードディスク又は不揮発性半導体メモリである。操作部24は、使用者4からの操作を受け付けることにより、テキスト等の情報の入力を受け付ける。操作部24は、例えばタッチパネルである。表示部25は、画像を表示する。表示部25は、例えば液晶ディスプレイ又はELディスプレイ(Electroluminescent Display)である。通信部26は、無線通信により、センサ装置3から送信されたデータを受信する。また、通信部26は、無線通信により、通信ネットワーク5を介して疲労状態判定装置1と通信を行う。
FIG. 3 is a block diagram showing an example of the internal configuration of the
記憶部23は、コンピュータプログラム231を記憶する。コンピュータプログラム231は、通信部26を用いてダウンロードされ、記憶部23に記憶される。例えば、コンピュータプログラム231は、疲労状態判定装置1からダウンロードされる。コンピュータプログラム231は、予め記憶部23に記憶されていてもよい。或は、コンピュータプログラム231は、記憶部23ではなく、メモリ22に記憶されてもよい。例えば、コンピュータプログラム231は、疲労状態判定システム100に関する処理を実行する際にダウンロードされ、メモリ22に記憶され、疲労状態判定システム100に関する処理が終了する際にメモリ22から消去されてもよい。演算部21は、コンピュータプログラム231に従って必要な処理を実行する。
The
図4は、疲労状態判定装置1の内部の機能構成例を示すブロック図である。疲労状態判定装置1は、サーバ装置等のコンピュータを用いて構成されている。疲労状態判定装置1は、演算部11と、演算に伴って発生する一時的なデータを記憶するメモリ12と、記憶部13と、光ディスク等の記録媒体10から情報を読み取るドライブ部14と、通信部15とを備えている。演算部11は、例えばCPU、GPU、又はマルチコアCPUを用いて構成されている。演算部11は、量子コンピュータを用いて構成されていてもよい。メモリ12は、例えばRAMである。記憶部13は、不揮発性であり、例えばハードディスクである。通信部15は、通信ネットワーク5に接続される。通信部15は、通信ネットワーク5を介して、端末装置2と通信を行う。
FIG. 4 is a block diagram showing an example of the internal functional configuration of the fatigue state determination device 1. The fatigue state determination device 1 is configured by using a computer such as a server device. The fatigue state determination device 1 communicates with a
演算部11は、記録媒体10に記録されたコンピュータプログラム131をドライブ部14に読み取らせ、読み取ったコンピュータプログラム131を記憶部13に記憶させる。演算部11は、コンピュータプログラム131に従って、疲労状態判定装置1に必要な処理を実行する。なお、コンピュータプログラム131は、通信部15により疲労状態判定装置1の外部からダウンロードされてもよい。この場合は、疲労状態判定装置1はドライブ部14を備えていなくてもよい。
The
疲労状態判定装置1は、センサ装置3での測定結果に基づいて使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定するために用いられる学習モデル16を備えている。学習モデル16は、加速度、角速度及び地磁気の履歴、並びに下肢の筋電位の特徴量を入力された場合に使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力するように、学習されている。また、学習モデル16は、筋電位の特徴量に関わるノードを確率的に不活性化しながら学習されることによって、下肢の筋電位の特徴量が入力されず、加速度、角速度及び地磁気の履歴が入力された場合に使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力するように、構成されている。
The fatigue state determination device 1 is used to determine whether the state of the
学習モデル16は、コンピュータプログラム131に従って演算部11が情報処理を実行することにより実現される。記憶部13は、学習モデル16を実現するために必要なデータを記憶している。なお、学習モデル16は、ハードウェアを用いて構成されていてもよい。例えば、学習モデル16は、プロセッサと、必要なプログラムおよびデータを記憶するメモリとを含んだハードウェアにより構成されていてもよい。又は、学習モデル16は、量子コンピュータを用いて実現されてもよい。
The
センサ装置3の測定結果に基づいて使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する方法を説明する。センサ装置3は、足にセンサ装置3を装着した使用者4が歩行することにより発生する加速度及び角速度を測定し、使用者4が歩行するときの地磁気を測定する。下肢の疲労を伴う動作の後では、下肢の疲労を伴う動作の前に比べて、疲労のために歩行の動作が変化する。例えば、足を振り上げる高さ、足の向き、又は足を動かす速度等が変化する。このため、足に装着されたセンサ装置3が測定する加速度、角速度及び地磁気は、下肢の疲労を伴う動作の前後で変化する。従って、センサ装置3の測定結果に基づいて使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定することができる。
A method of determining whether the state of the
図5は、歩行中の加速度及び角速度の時間変化の例を示すグラフである。図5の横軸は時間を示し、縦軸は加速度及び角速度を示す。加速度及び角速度は、向きに応じて正又は負の値を有する。図5中の太線はZ方向の加速度を示し、細線はX方向の角速度を示す。Z方向は上下方向である。X方向は、Z方向に直交する平面に含まれる互いに直交するX方向及びY方向の一方である。例えば、X方向、Y方向及びZ方向は、地面に対して固定された互いに直交するX軸、Y軸及びZ軸の夫々に沿った方向である。図5に示す例では、X方向の角速度は、使用者4の足の前後方向の揺れに対応する。なお、Y方向の角速度が使用者4の足の前後方向の揺れに対応するように、X方向及びY方向を設定してもよい。
FIG. 5 is a graph showing an example of changes in acceleration and angular velocity during walking over time. The horizontal axis of FIG. 5 indicates time, and the vertical axis indicates acceleration and angular velocity. Acceleration and angular velocity have positive or negative values depending on the orientation. The thick line in FIG. 5 indicates the acceleration in the Z direction, and the thin line indicates the angular velocity in the X direction. The Z direction is the vertical direction. The X direction is one of the X and Y directions orthogonal to each other included in the plane orthogonal to the Z direction. For example, the X-direction, the Y-direction, and the Z-direction are directions along the X-axis, the Y-axis, and the Z-axis, which are fixed to the ground and orthogonal to each other. In the example shown in FIG. 5, the angular velocity in the X direction corresponds to the sway of the foot of the
図5には、片足に装着されたセンサ装置3が測定した加速度及び角速度の例を示している。歩行時には、足は周期的に運動し、加速度及び角速度は周期的に変化する。足が接地する直前には、足は下向きに移動し、直後には上向きに移動する。このため、Z方向の加速度は、接地の前後で下向きから上向きへ大きく変化する。また、足が接地する直前には、踏み出すために足は前向きに揺れ、直後には地面を後ろへ蹴るために足は後ろ向きに揺れる。このため、X方向の角速度は、接地の前後で向きが変わり、大きく変化する。従って、Z方向の加速度及びX方向の加速度の時間に対する変化に基づいて、足が接地した時点を特定することができる。例えば、Z方向の加速度が正の第1の閾値を超過し、直前の所定期間内にX方向の角速度が負の第2の閾値を下回っている場合に、Z方向の加速度が第1の閾値を超過した時点を接地の時点と特定する。
FIG. 5 shows an example of acceleration and angular velocity measured by the
本実施形態では、同じ足が接地した時点から次に接地する時点までの期間を、片足による一歩行の期間とする。片足による一歩行の期間は、両足による二歩の期間に相当する。足が接地した時点を特定することができるので、一歩行の期間を特定することができる。また、繰り返し測定された加速度、角速度及び地磁気の測定結果から、一歩行の期間に複数回測定された加速度、角速度及び地磁気の履歴を抽出することができる。図5には、足が接地した時点を破線で示し、夫々の一歩行の期間を示す。一歩行の期間は一定ではない。このため、一歩行の期間における加速度、角速度及び地磁気の測定回数も一定ではない。 In the present embodiment, the period from the time when the same foot touches the ground to the time when the same foot touches the ground next is defined as the period of one walking with one foot. The period of one walk with one foot corresponds to the period of two steps with both feet. Since the time when the foot touches the ground can be specified, the period of one walk can be specified. In addition, the history of acceleration, angular velocity, and geomagnetism measured multiple times during one walking can be extracted from the measurement results of acceleration, angular velocity, and geomagnetism that are repeatedly measured. FIG. 5 shows the time when the foot touches the ground with a broken line, and shows the period of each walking. The duration of one walk is not constant. Therefore, the number of measurements of acceleration, angular velocity, and geomagnetism during one walking period is not constant.
本実施形態では、一歩行の期間における加速度、角速度及び地磁気の履歴に基づいて、判定を行う。一歩行の期間には、片足による周期的な動作の中の一周期に相当する動作が行われ、加速度、角速度及び地磁気は周期的な変化の中の一周期に相当する変化を起こす。このため、一歩行の期間における加速度、角速度及び地磁気の履歴は、使用者4の歩行の特徴を反映し、使用者4の状態を判定するための情報となり得る。
In the present embodiment, the determination is made based on the history of acceleration, angular velocity, and geomagnetism during one walking period. During the period of one walk, the movement corresponding to one cycle in the periodic movement by one foot is performed, and the acceleration, the angular velocity and the geomagnetism cause the change corresponding to one cycle in the periodic change. Therefore, the history of acceleration, angular velocity, and geomagnetism during one walking period reflects the walking characteristics of the
また、本実施形態では、学習モデル16の学習に筋電位をも利用する。筋電位は、筋肉が活動するときに出される活動電位であり、筋電計により測定される。測定される筋電位の周波数解析を行うことにより、筋電位の特徴量が得られる。例えば、筋電計の測定結果をフーリエ変換することにより、周波数解析が行われる。筋電位の特徴量は、筋電位の特徴を表し、筋肉の疲労の有無に応じて変化を示す筋電位の統計量である。例えば、筋電位の特徴量は、筋電位の中間周波数又は平均周波数である。筋電位の中間周波数は、周波数解析により得られた筋電位のパワースペクトルの面積を二等分する周波数である。筋電位の平均周波数は、周波数解析により得られた筋電位の周波数の平均である。
Further, in the present embodiment, the myoelectric potential is also used for learning the
徐波化により、筋肉の疲労度が高いほど、筋電位の中間周波数及び平均周波数は低下する。逆に、筋肉が疲労していない状態又は筋肉が疲労から回復した状態では、筋電位の中間周波数及び平均周波数は高くなる。このため、使用者4の下肢から得られた筋電位の特徴量は、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかに応じた量となる。従って、筋電位の特徴量を利用して学習モデル16の学習を行うことにより、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを正確に判定できるように、学習モデル16を学習することができる。
Due to the slow wave, the higher the degree of muscle fatigue, the lower the intermediate frequency and average frequency of the myoelectric potential. On the contrary, when the muscle is not tired or the muscle is recovered from fatigue, the intermediate frequency and the average frequency of the myoelectric potential are high. Therefore, the feature amount of the myoelectric potential obtained from the lower limbs of the
図6は、実施形態1に係る学習モデル16の機能を示す概念図である。学習モデル16には、一歩行の期間におけるX方向、Y方向及びZ方向の加速度の履歴と、一歩行の期間におけるX方向、Y方向及びZ方向の角速度の履歴と、一歩行の期間におけるX方向、Y方向及びZ方向の地磁気の履歴とが入力される。一歩行の期間における加速度の履歴とは、一歩行の期間に順次的に測定された複数の加速度の値である。X方向、Y方向及びZ方向の加速度とは、X方向、Y方向及びZ方向の夫々の加速度である。角速度及び地磁気についても同様である。更に、学習モデル16には、筋電位の特徴量が入力される。学習モデル16は、一歩行の期間における加速度、角速度及び地磁気の履歴、並びに筋電位の特徴量が入力された場合に、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す状態情報を出力するように学習されている。更に、学習モデル16は、筋電位の特徴量に関わるノードを確率的に不活性化しながら学習されることによって、下肢の筋電位の特徴量が入力されず、一歩行の期間における加速度、角速度及び地磁気の履歴が入力された場合に、状態情報を出力するように、構成されている。
FIG. 6 is a conceptual diagram showing the function of the
図7は、実施形態1に係る学習モデル16の構成例を示す概念図である。図7には、入力層161、複数の中間層1621,1622,…,162n及び出力層163を備えた全結合のニューラルネットワークを用いて学習モデル16を構成した例を示す。nは中間層の数である。図7中の円はノードを示す。入力層161は、一歩行の期間におけるX方向の加速度の複数の値を夫々に入力される複数のノードを有する。また、入力層161は、Y方向の加速度の複数の値、及びZ方向の加速度の複数の値を夫々に入力される複数のノードを有する。また、入力層161は、X方向、Y方向及びZ方向の角速度の複数の値、及びX方向、Y方向及びZ方向の地磁気の複数の値を夫々に入力される複数のノードを有する。更に、入力層161は、筋電位の特徴量を入力されるノードを有する。例えば、一歩行の期間において加速度、角速度及び地磁気はm(mは自然数)回測定され、入力層161へは(9m+1)個の値が入力される。
FIG. 7 is a conceptual diagram showing a configuration example of the
学習モデル16はn層の中間層を有している。第1の中間層1621は、複数のノードを有する。入力層161の夫々のノードは、第1の中間層1621の複数のノードへ信号値を出力する。各ノードは、入力層161のノードから信号値を受け付け、信号値にパラメータを用いて演算し、第2の中間層1622に含まれる複数のノードへ演算結果のデータを出力する。各中間層に含まれるノードは、前の中間層の複数のノードからデータを受け付け、受け付けたデータにパラメータを用いて演算し、後の中間層のノードへデータを出力する。例えば、ノードは、前の層の各ノードから受け付けたデータの値をx、各ノードに対応する重みをw、バイアス値をb、活性化関数をf()として、f(Σ(w*x)+b)の演算を行い、演算結果のデータを後の層の複数のノードへ出力する。
The
学習モデル16の出力層163は、単一のノードを有する。第nの中間層162nに含まれる複数のノードは、出力層163に含まれるノードへデータを出力する。出力層163のノードは、複数のノードからデータを受け付け、受け付けたデータにパラメータを用いて演算し、状態情報を出力する。例えば、状態情報は、0又は1の値であり、0の値は使用者4の状態が下肢の疲労を伴う動作を行う前の状態であることを示し、1の値は使用者4の状態が下肢の疲労を伴う動作を行った後の状態であることを示す。0又は1の値と使用者4の状態との対応関係は逆であってもよい。状態情報は、0又は1以外の値であってもよい。或は、状態情報は、使用者4の状態が下肢の疲労を伴う動作を行う前の状態である確率、又は下肢の疲労を伴う動作を行った後の状態である確率に対応する値であってもよい。例えば、状態情報は、正又は負のいずれか一方の値をとり、負の値の絶対値は使用者4の状態が下肢の疲労を伴う動作を行う前の状態である確率に対応し、正の値の絶対値は使用者4の状態が下肢の疲労を伴う動作を行う前の状態である確率に対応してもよい。
The
学習モデル16は、ニューラルネットワークとして、畳みこみニューラルネットワーク(CNN:Convolutional Neural Network)、又は再帰型ニューラルネットワーク(RNN:Recurrent Neural Network)を用いてもよい。学習モデル16は、一歩行の期間における加速度、角速度及び地磁気の履歴として、画像データを入力される形態であってもよい。画像データは、例えば、一歩行の期間におけるX方向、Y方向及びZ方向の加速度、角速度及び地磁気の値の時間変化を表したグラフの画像データである。
As the
学習モデル16の学習は、コンピュータを用いて行われる。図8は、学習モデル16の学習を行う学習装置6の構成例を示すブロック図である。学習装置6は学習モデル生成方法を実行する。学習装置6は、サーバ装置等のコンピュータである。学習装置6は、演算部61と、メモリ62と、記憶部63と、操作部64と、表示部65と、入力部66とを備えている。演算部61は、例えばCPU、GPU又はマルチコアCPUを用いて構成されている。演算部61は、量子コンピュータを用いて構成されていてもよい。メモリ62は例えばRAMである。記憶部63は、不揮発性であり、例えばハードディスクである。記憶部63は、コンピュータプログラム631を記憶している。演算部61は、コンピュータプログラム631に従って処理を実行する。操作部64は、使用者からの操作を受け付けることにより、テキスト等の情報の入力を受け付ける。操作部64は、例えばキーボード又はタッチパネルである。表示部65は、例えば液晶ディスプレイ又はELディスプレイである。入力部66は、外部からのデータの入力を受け付けるインタフェースである。
The learning of the
図9は、学習モデル16を生成する処理の手順を示すフローチャートである。以下、ステップをSと略す。演算部61は、コンピュータプログラム631に従って以下の処理を実行する。演算部61は、下肢の疲労を伴う動作を行う前の人の足に装着されたセンサ装置3により一歩行の期間に測定された加速度、角速度及び地磁気の履歴と、当該人の足に装着された筋電計により測定された筋電位の特徴量とを含む動作前データを生成する(S11)。S11では、学習装置6は、センサ装置3の測定結果を表すデータを入力部66で受け付け、データを記憶部63に記憶する。演算部61は、操作部64で受け付けた指示に従って、動作前データを生成する処理を行う。例えば、演算部61は、図5に示す如き長期間の加速度、角速度及び地磁気の履歴から、一歩行の期間における加速度、角速度及び地磁気の履歴を抽出する。
FIG. 9 is a flowchart showing the procedure of the process of generating the
学習装置6は、筋電位の中間周波数又は平均周波数等の特徴量を入力部66で受け付け、演算部61は、筋電位の特徴量を動作前データに含ませる。又は、学習装置6は、筋電計による筋電位の測定結果を受け付け、演算部61は、周波数解析を行い、筋電位の特徴量を計算し、筋電位の特徴量を動作前データに含ませてもよい。学習装置6は、筋電位のパワースペクトルを受け付け、演算部61は、筋電位の特徴量を計算し、筋電位の特徴量を動作前データに含ませてもよい。動作前データに含まれる筋電位の特徴量は、徐波化を示していない。
The learning device 6 receives a feature amount such as an intermediate frequency or an average frequency of the myoelectric potential in the
演算部61は、複数の動作前データを生成する。演算部61は、一人の被験者による複数回の歩行に応じた複数の動作前データを生成してもよい。演算部61は、複数の被験者による歩行に応じた複数の動作前データを生成してもよい。演算部61は、シミュレーションによって複数の動作前データの一部を生成してもよい。演算部61は、複数の動作前データを記憶部63に記憶する。
The
演算部61は、次に、下肢の疲労を伴う特定の動作を行った後の人の足に装着されたセンサ装置3により一歩行の期間に測定された加速度、角速度及び地磁気の履歴と、当該人の足に装着された筋電計により測定された筋電位の特徴量とを含む動作後データを生成する(S12)。例えば、特定の動作は、600歩等の所定歩数のヒールウォークである。ヒールウォークは、つま先が接地しない体勢での歩行である。ヒールウォークは、前脛骨筋等の足の筋肉に対する負担が大きく、ヒールウォークの後では疲労度が大きくなり、歩行の動作の変化が顕著になる。このため、加速度、角速度及び地磁気のヒールウォーク前後での違いが顕著になる。ヒールウォークを行った被験者から得られたデータを用いることにより、下肢の疲労を伴う動作の後の状態を特徴づける動作後データが得られる。動作後データに含まれる筋電位の特徴量は、徐波化の発生を示している。例えば、特徴量である中間周波数又は平均周波数は、予め定められた所定の値よりも低下している。
Next, the
S12では、学習装置6は、センサ装置3の測定結果を表すデータを入力部66で受け付ける。学習装置6は、入力部66で、筋電位の特徴量を受け付けるか、筋電計による筋電位の測定結果を受け付けるか、又は筋電位のパワースペクトルを受け付ける。演算部61は、動作後データを生成する処理を行う。演算部61は、複数の動作後データを生成する。演算部61は、複数の動作後データを記憶部63に記憶する。動作前データ及び動作後データに含まれる加速度、角速度及び地磁気の値は、後述するように、センサ装置3に対して固定された軸に沿った方向の加速度、角速度及び地磁気を、X方向、Y方向及びZ方向の加速度、角速度及び地磁気へ変換した後の値である。
In S12, the learning device 6 receives data representing the measurement result of the
演算部61は、次に、動作前データ、動作後データ、並びに夫々のデータに関する加速度、角速度、地磁気及び筋電位を測定された被験者の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す状態情報を訓練データとして、学習モデル16を生成するための処理を行う(S13)。S13では、演算部61は、一の動作前データ又は一の動作後データに含まれる加速度、角速度及び地磁気の履歴並びに筋電位の特徴量を、学習モデル16の入力層へ入力する。演算部61は、動作前データには、下肢の疲労を伴う動作を行う前の状態であることを示す状態情報を関連付け、動作後データには、下肢の疲労を伴う動作を行った後の状態であることを示す状態情報を関連付ける。学習モデル16によって、出力層163のノードから状態情報が出力される。演算部61は、入力された動作前データ又は動作後データに関連付けられた状態情報と出力層163のノードから出力された状態情報とを変数とする誤差関数により状態情報の誤差を計算し、誤差が最小となるように、学習モデル16の各ノードの演算のパラメータを調整する。即ち、動作前データが入力されたときには下肢の疲労を伴う動作を行う前の状態であることを示す情報に近い状態情報が出力され、動作後データが入力されたときには下肢の疲労を伴う動作を行った後の状態であることを示す情報に近い状態情報が出力されるように、パラメータが調整される。例えば、演算部61は、誤差逆伝播法によってパラメータを調整する。演算部61は、誤差逆伝播法以外の学習アルゴリズムによってパラメータを調整してもよい。
Next, the
演算部61は、複数の動作前データ及び複数の動作後データを用いて処理を繰り返して、学習モデル16の各ノードのパラメータを調整することにより、学習モデル16の機械学習を行う。機械学習を行うにあたって、演算部61は、筋電位の特徴量に関わるノードを確率的に不活性化しながら、処理を繰り返して、各ノードのパラメータを調整する。例えば、演算部61は、予め定められた所定の確率で、筋電位の特徴量に関わるノードを不活性化する。筋電位の特徴量に関わるノードとは、筋電位の特徴量が入力されるノード、又は筋電位の特徴量を用いて計算を行うノードである。ノードの不活性化とは、ノードを使用しないことであり、あるノードを不活性化した状態では、演算部61は、そのノードを含んでいないニューラルネットワークを学習させる処理を行う。処理が繰り返される都度、不活性化されるノードは確率的に変更される。確率は固定されていなくてもよい。演算部61は、調整された最終的なパラメータを記録した学習済みデータを記憶部63に記憶する。このようにして、学習された学習モデル16が生成される。動作前データ及び動作後データを訓練データとして利用することによって、適切に学習された学習モデル16を生成することができる。S13が終了した後、演算部61は処理を終了する。疲労状態判定装置1が備える学習モデル16は、学習済みデータに基づいて製造される。例えば、学習済みデータに記録されたパラメータが記憶部13に書き込まれることにより、学習モデル16が製造される。
The
次に、疲労状態判定システム100が実行する処理を説明する。図10は、疲労状態判定システム100が加速度、角速度及び地磁気を取得する処理の手順を示すフローチャートである。使用者4の足に装着されたセンサ装置3は、加速度センサ32、角速度センサ33及び地磁気センサ34により、加速度、角速度及び地磁気を測定する(S21)。加速度センサ32、角速度センサ33及び地磁気センサ34は、センサ装置3に対して固定された互いに直交する三つの軸の夫々に沿った方向の加速度、角速度及び地磁気を測定する。センサ装置3に対して固定されたx軸、y軸及びz軸の夫々に沿った方向を、x方向、y方向及びz方向とする。一般的に、x方向、y方向及びz方向はX方向、Y方向及びZ方向とは異なる。使用者4が歩行する際にセンサ装置3は移動するので、x方向、y方向及びz方向は地面に対して変化する。
Next, the process executed by the fatigue
加速度、角速度及び地磁気の測定の都度、センサ装置3は、端末装置2を介して、加速度、角速度及び地磁気を疲労状態判定装置1へ送信する(S22)。S22では、制御部31は、加速度、角速度及び地磁気の測定の都度、通信部35に、加速度、角速度及び地磁気の値を含むデータを端末装置2へ送信させる。端末装置2は、通信部26でデータを受信し、演算部21は、通信部26に、受信したデータを疲労状態判定装置1へ送信させる。疲労状態判定装置1は、データを通信部15で受信し、演算部11は、受信したデータに含まれる加速度、角速度及び地磁気の値を記憶部13に記憶する(S23)。記憶部13には、繰り返し測定された加速度、角速度及び地磁気の値が記憶される。
Each time the acceleration, the angular velocity and the geomagnetism are measured, the
演算部11は、次に、受信した加速度、角速度及び地磁気に関し、X軸、Y軸及びZ軸に対するx軸、y軸及びz軸の姿勢角を計算する(S24)。Z軸は上下方向に沿った軸であり、X軸及びY軸はZ軸に直交する平面に含まれる互いに直交する二軸である。X軸、Y軸及びZ軸は、地面に対して固定されている。例えば、Z軸に沿ったZ方向は鉛直方向であり、X軸に沿ったX方向は東西方向であり、Y軸に沿ったY方向は南北方向である。或は、X軸及びY軸は使用者の身体に対して固定された方向であってもよい。例えば、X軸に沿ったX方向は使用者4に対する左右方向であり、Y軸に沿ったY方向は使用者4に対する前後方向であってもよい。姿勢角は、X軸、Y軸及びZ軸に対してx軸、y軸及びz軸がどの程度傾いているかを示す。姿勢角は三次元で表される。
Next, the
S24では、演算部11は、センサ装置3が静止しているか否かを判定する。例えば、記憶されている直近の所定数の加速度、角速度及び地磁気の値が変化していない場合に、演算部11は、センサ装置3が静止していると判定する。センサ装置3が静止している場合、演算部11は、測定された加速度の向きが重力の向きであるとして、Z方向を特定し、Z方向に直交する平面に含まれる互いに直交するX方向及びY方向を特定する。演算部11は、X方向及びY方向を特定する際に、地磁気を利用してもよい。センサ装置3が静止していない場合は、演算部11は、角速度の積分が角度であることを利用して、姿勢角を計算する。計算は、これまでに記憶された加速度、角速度及び地磁気の履歴に基づいて行われる。より具体的には、演算部11は、加速度、角速度及び地磁気をMadgwickフィルタへ入力し、Madgwickフィルタの出力を取得する演算を行うことにより、姿勢角を計算する。なお、演算部11は、Madgwickフィルタを用いる方法以外の方法で姿勢角を計算してもよい。演算部11は、角速度の履歴に基づいて姿勢角を計算する等、加速度、角速度及び地磁気の中の一部の情報のみを利用して姿勢角を計算してもよい。
In S24, the
演算部11は、姿勢角に基づいて、加速度、角速度及び地磁気を、X方向、Y方向及びZ方向の加速度、角速度及び地磁気へ変換する(S25)。センサ装置3が測定した加速度、角速度及び地磁気は、x方向、y方向及びz方向の加速度、角速度及び地磁気である。X方向、Y方向及びZ方向に対するx方向、y方向及びz方向の姿勢角が得られたので、姿勢角に基づいて、x方向、y方向及びz方向の加速度、角速度及び地磁気を、X方向、Y方向及びZ方向の加速度、角速度及び地磁気へ変換することができる。X方向、Y方向及びZ方向の加速度、角速度及び地磁気への変換によって、センサ装置3で測定された加速度、角速度及び地磁気が補正される。X方向、Y方向及びZ方向の加速度、角速度及び地磁気が得られることにより、加速度、角速度及び地磁気からセンサ装置3が移動することによる影響が除去され、加速度、角速度及び地磁気に対する使用者4の歩行の影響が明確になる。
The
演算部11は、変換後の加速度、角速度及び地磁気を記憶部13に記憶する(S25)。S25が終了した後、演算部11は、加速度、角速度及び地磁気を取得する処理を終了する。記憶部13には、X方向、Y方向及びZ方向の加速度、角速度及び地磁気の履歴が記憶される。
The
S21~S26の処理は、センサ装置3が加速度、角速度及び地磁気を測定する都度、繰り返し実行される。なお、センサ装置3は、S22で、加速度、角速度及び地磁気の測定の都度、データを送信するのではなく、加速度、角速度及び地磁気を複数回測定した結果をまとめたデータを送信する形態であってもよい。この形態では、S22~S26の処理は、まとめて送信された加速度、角速度及び地磁気の複数回の測定結果に対して、実行される。
The processes of S21 to S26 are repeatedly executed each time the
疲労状態判定システム100は、S23~S25の処理を端末装置2で実行する形態であってもよい。この形態では、端末装置2は、加速度、角速度及び地磁気の値を含むデータを通信部26で受信し、演算部21は、加速度、角速度及び地磁気の値を記憶部23に記憶し、S24及びS25の処理を実行する。その後、演算部21は、通信部26に、X方向、Y方向及びZ方向の加速度、角速度及び地磁気の値を含むデータを、疲労状態判定装置1へ送信させる。疲労状態判定装置1は、データを通信部15で受信し、演算部11は、S26の処理を実行する。或は、疲労状態判定システム100は、センサ装置3から端末装置2を経由せずに疲労状態判定装置1へデータを送信する形態であってもよい。
The fatigue
疲労状態判定システム100は、S25までの処理をセンサ装置3で実行する形態であってもよい。この形態では、センサ装置3は、S22の処理を実行せずに、S21及びS23~S25の処理を自身で実行する。その後、センサ装置3は、端末装置2を経由せずに疲労状態判定装置1へデータを送信する。センサ装置3は、端末装置2を経由せずに疲労状態判定装置1へデータを送信してもよい。
The fatigue
X方向、Y方向及びZ方向の加速度、角速度及び地磁気の履歴が記憶部13に記憶されている状態で、疲労状態判定装置1は、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する。図11は、疲労状態判定装置1が実行する判定の処理の手順を示すフローチャートである。演算部11は、記憶部13に記憶している加速度、角速度及び地磁気の履歴から、一歩行の期間における加速度、角速度及び地磁気の履歴を抽出する(S31)。
In a state where the history of acceleration, angular velocity, and geomagnetism in the X, Y, and Z directions is stored in the
図5を用いて前述したように、上下方向の加速度の時間変化と、使用者4の足の前後方向の揺れに対応する方向の角速度の時間変化とに基づいて、足が接地した時点を特定することができる。S31では、演算部11は、例えば、Z方向の加速度及びX方向の角速度の時間変化に基づいて、使用者4の足が接地した時点を特定する。演算部11は、記憶されている加速度、角速度及び地磁気の履歴の中から、足が接地した時点から次に接地する時点までの期間に含まれる加速度、角速度及び地磁気の履歴を、一歩行の期間に測定された加速度、角速度及び地磁気の履歴として抽出する。このとき、演算部11は、X方向、Y方向及びZ方向の夫々について加速度、角速度及び地磁気の履歴を抽出する。演算部11は、足が接地した時点を三個以上特定し、複数の一歩行の期間の夫々について、加速度、角速度及び地磁気の履歴を抽出してもよい。なお、接地の時点を特定する方法は、Z方向の加速度及びX方向の角速度を用いる方法に限るものではない。演算部11は、接地の時点を特定するために、その他の加速度又は角速度を用いてもよく、三個以上の加速度又は角速度を用いてもよい。
As described above with reference to FIG. 5, the time point at which the foot touches the ground is specified based on the time change of the acceleration in the vertical direction and the time change of the angular velocity in the direction corresponding to the shaking of the foot in the front-back direction of the
演算部11は、次に、一歩行の期間におけるX方向、Y方向及びZ方向の加速度、角速度及び地磁気の履歴を、学習モデル16へ入力する(S32)。S32では、演算部11は、学習モデル16へ、加速度、角速度及び地磁気の履歴を入力する一方で、筋電位の特徴量を入力せずに、学習モデル16に演算を行わせる。例えば、演算部11は、学習モデル16のノードの中で、筋電位の特徴量を入力されるノードと、加速度、角速度及び地磁気を用いずに筋電位の特徴量を用いて計算を行うノードとを不活性化する。これにより、学習モデル16は、筋電位の特徴量が入力されずに、加速度、角速度及び地磁気の履歴を入力された場合に状態情報を出力するように機能する。加速度、角速度及び地磁気の履歴を入力された学習モデル16は、前述したように、ニューラルネットワークの演算を行い、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す状態情報を出力する。X方向、Y方向及びZ方向の加速度、角速度及び地磁気には使用者4の歩行の影響が明確に現れるので、X方向、Y方向及びZ方向の加速度、角速度及び地磁気を利用することにより、正確な状態情報が得られる。
Next, the
複数の一歩行の期間の夫々について加速度、角速度及び地磁気の履歴を抽出している場合は、加速度、角速度及び地磁気の履歴の学習モデル16への入力と、学習モデル16からの状態情報の出力とを、複数の一歩行の期間の夫々について個別に実行する。複数の一歩行の期間の夫々について状態情報が出力され、複数の状態情報が得られる。一歩行の期間は一定ではないので、一歩行の期間に測定された加速度、角速度及び地磁気の値の数は一定ではない。学習モデル16へ入力される加速度、角速度及び地磁気の値の数は、一定ではなくてもよい。演算部11は、間引き又は補完の処理により、学習モデル16へ入力される加速度、角速度及び地磁気の値の数を一定に調整してもよい。或は、演算部は、複数の一歩行の期間の間で、加速度、角速度及び地磁気の履歴を平均し、平均した加速度、角速度及び地磁気の履歴を学習モデル16へ入力してもよい。
When the history of acceleration, angular velocity and geomagnetism is extracted for each of a plurality of walking periods, the history of acceleration, angular velocity and geomagnetism is input to the
演算部11は、次に、学習モデル16が出力した状態情報に応じて、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する(S33)。S33では、演算部11は、状態情報の値に応じて判定を行う。状態情報が確率を表す形態では、S33では、演算部11は、確率に応じて判定を行う。例えば、状態情報は、使用者4の状態が下肢の疲労を伴う動作を行った後の状態である確率に対応する値である。演算部11は、状態情報の値が所定値未満である場合に、使用者4の状態は下肢の疲労を伴う動作を行う前の状態であると判定し、状態情報の値が所定値以上である場合に、使用者4の状態は下肢の疲労を伴う動作を行った後の状態であると判定する。状態情報に基づくことにより、演算部11は、筋電位を利用することなく、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する。なお、演算部11は、状態情報に基づいて、使用者4の状態が下肢の疲労を伴う動作を行う前の状態である確率、又は使用者4の状態が下肢の疲労を伴う動作を行う後の状態である確率を判定してもよい。
Next, the
複数の状態情報が得られている場合は、演算部11は、複数の状態情報に基づいて判定を行う。例えば、演算部11は、複数の状態情報を平均し、状態情報の平均値に基づいて、判定を行う。例えば、演算部11は、複数の状態情報の夫々に基づいて判定を行い、複数の判定結果の中から多数を占める判定結果を採用することにより、最終的な判定を行う。複数の状態情報を利用することにより、より正確な判定が可能となる。
When a plurality of state information is obtained, the
演算部11は、次に、判定結果を出力する(S34)。S34では、演算部11は、通信部15に、判定結果を示す情報を端末装置2へ送信させる。端末装置2は、疲労状態判定装置1から送信された情報を通信部26で受信する。演算部21は、受信した情報が示す判定結果を、表示部25に表示させる。使用者4は、端末装置2を用いて、判定結果を確認することができる。S34では、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかが出力されてもよく、使用者4の状態が下肢の疲労を伴う動作を行う前の状態である確率、又は使用者4の状態が下肢の疲労を伴う動作を行う後の状態である確率が出力されてもよい。S34が終了した後、疲労状態判定装置1は、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する処理を終了する。
Next, the
以上詳述した如く、使用者4は、足にセンサ装置3が装着された状態で歩行し、センサ装置3は、歩行によって発生する加速度及び角速度、並びに地磁気を測定する。疲労状態判定装置1は、学習モデル16を用いて、加速度、角速度及び地磁気の履歴から、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する。下肢の疲労を伴う動作の後では、下肢の疲労を伴う動作の前に比べて、疲労のために歩行の動作が変化し、センサ装置3が測定する加速度、角速度及び地磁気が変化する。従って、適切な学習モデル16を利用することにより、使用者4が筋電計を長時間装着し続けることなく、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを簡便に判定することができる。
As described in detail above, the
ヒールウォーク等の特定の動作に限らず、下肢の筋電位に徐波化が認められるような、下肢に疲労が発生する程度の強度の動作であれば、使用者4が動作を行った場合には、動作を行った後の状態であることが判定される。このため、使用者4が日常生活における動作等のどのような動作を行った場合でも、その動作が下肢の疲労を伴う動作であれば、使用者4の状態が下肢の疲労を伴う動作を行った後の状態であることが判定される。使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定した結果は、使用者4の下肢の疲労の推定に役立てることができ、更には使用者4の日常的な疲労の推定に役立てることができる。
Not limited to specific movements such as heel walks, if the movement is strong enough to cause fatigue in the lower limbs, such as slowing of the myoelectric potential of the lower limbs, when the
なお、本実施形態では、学習モデル16がニューラルネットワークである例を示したが、疲労状態判定システム100は、学習モデル16として、サポートベクターマシン又はランダムフォレスト等、ニューラルネットワーク以外のモデルを用いた形態であってもよい。本実施形態では、動作後データを作成するための下肢の疲労を伴う特定の動作として、所定歩数のヒールウォークを例示したが、動作後データを作成するための特定の動作は、下肢の疲労を伴う動作であれば、その他の動作であってもよい。特定の動作は、所定時間継続されたヒールウォークであってもよく、通常の歩行、トーウォーク又は早歩き等、ヒールウォーク以外の歩行であってもよい。特定の動作は、歩き方を限定しない所定歩数の歩行、又は所定時間継続された歩行であってもよい。特定の動作は、走ること、又は日常生活における動作等、歩行以外の動作を含んでいてもよい。
In this embodiment, an example in which the
<実施形態2>
実施形態1では、学習モデル16が教師あり学習により学習される形態を示した。実施形態2では、学習モデル16は、教師無し学習により学習され、使用者4の状態の異常度を状態情報として出力する異常検知モデルである。異常度は、下肢の疲労を伴う動作を行う前の状態を正常な状態として、使用者4の状態の異常の程度を示す値である。異常度が大きい場合に、使用者4の状態は、異常な状態、即ち下肢の疲労を伴う動作を行った後の状態であると判定される。異常検知モデルとして、DAGMM(Deep Autoencoding Gaussian Mixture Model)を利用した例を示す。DAGMMは、下記の文献に記載されている。
<
In the first embodiment, the
Bo Zong, Qi Song, Martin Renqiang Min, Wei Cheng, Cristian Lumezanu, Daeki Cho, and Haifeng Chen, "Deep Autoencoding Gaussian Mixture Model for Unsupervised Anomaly Detection", International Conference on Learning Representations, 2018. Bo Zong, Qi Song, Martin Renqiang Min, Wei Cheng, Cristian Lumezanu, Daeki Cho, and Haifeng Chen, "Deep Autoencoding Gaussian Mixture Model for Unsupervised Anomaly Detection", International Conference on Learning Representations, 2018.
図12は、DAGMMの概要を示す概念図である。使用者4の状態はベクトルzで表されるとする。ベクトルzについて、GMM(ガウス混合モデル)で表されるK個のクラスタの夫々に属する確率が得られる。一歩行の期間におけるX方向、Y方向及びZ方向の加速度、角速度及び地磁気の履歴を、ベクトルxで表す。ベクトルxは、圧縮ネットワーク(compression network )71へ入力される。圧縮ネットワーク71は、自己符号化器(Autoencoder )である。圧縮ネットワーク71は、ベクトルxの入力に応じて、再構築ベクトルx’を出力する。再構築ベクトルx’は、自己符号化器によってベクトルxを再構築したものである。また、圧縮ネットワーク71は、潜在変数zc を出力する。潜在変数zc は、ベクトルxの低次元化された特徴表現である。
FIG. 12 is a conceptual diagram showing an outline of DAGMM. It is assumed that the state of the
ベクトルx及び再構築ベクトルx’から,再構築誤差に由来する特徴量zr が計算される。ベクトルxと再構築ベクトルx’との誤差関数をf(x,x’)として、zr =f(x,x’)である。使用者4の状態を表すベクトルzは、潜在変数zc と特徴量zr とを結合することにより得られる。ベクトルzは、z=[zc ,zr ]で表される。ベクトルzは、推定ネットワーク(estimation network)72へ入力される。推定ネットワーク72は、ニューラルネットワークである。推定ネットワーク72は、ベクトルzの入力に応じて、ベクトルzが各クラスタへ帰属する確率を示すベクトルγを出力する。ベクトルγは、K個の成分を有する。kを1以上K以下の自然数として、ベクトルγに含まれる成分γk は、k番目のクラスタにベクトルzが属する確率である。ベクトルγはソフトマックス関数の出力として得られる。
From the vector x and the reconstruction vector x', the feature amount zr derived from the reconstruction error is calculated. Let f (x, x') be the error function between the vector x and the reconstruction vector x', and z r = f (x, x'). The vector z representing the state of the
一つの動作前データから一つのベクトルxが得られる。動作前データは、下肢の疲労を伴う動作を行う前の人の足に装着されたセンサ装置3により一歩行の期間に測定された加速度、角速度及び地磁気の履歴からなる。複数の動作前データから、複数のベクトルxが得られ、夫々のベクトルxについてベクトルγが得られる。ベクトルxの数をNとする。iを1以上N以下の自然数として、i番目のベクトルzをzi とし、k番目のクラスタにベクトルzi が属する確率をγikとする。k番目のクラスタの混合率φk は下記の(1)式で表され、k番目のクラスタの平均μk は下記の(2)式で表され、k番目のクラスタの共分散行列Σk は下記の(3)式で表される。
One vector x is obtained from one pre-operation data. The pre-motion data consists of a history of acceleration, angular velocity, and geomagnetism measured during one walk by a



ここで、負の対数尤度E(z)を、下記の(4)式で計算することができる。負の対数尤度E(z)は、ベクトルzがK個のクラスタから離れた度合いを示す。 Here, the negative log-likelihood E (z) can be calculated by the following equation (4). The negative log-likelihood E (z) indicates the degree to which the vector z is separated from the K clusters.

i番目のベクトルxをxi とし、i番目の再構築ベクトルx’をx’i とする。DAGMMの目的関数Jは、下記の(5)式で表される。 Let x i be the i-th vector x, and let x'i be the i -th reconstruction vector x'. The objective function J of DAGMM is expressed by the following equation (5).

(5)式に含まれるL(xi ,x’i )は、再構築誤差を特徴づける損失関数である。例えば、L2ノルムを用いて、L(xi ,x’i )=||xi - x’i ||2
2である。ベクトルzの次元である。(Σk )jjは、共分散行列Σk のj番目の対角要素である。|・|は行列式である。λ1 及びλ2 は定数であり、例えば、λ1 =0.1、λ2 =0.005である。目的関数Jを最小にするように圧縮ネットワーク71及び推定ネットワーク72のパラメータを調整することにより、圧縮ネットワーク71及び推定ネットワーク72は最適化される。また、圧縮ネットワーク71及び推定ネットワーク72のハイパーパラメータは、グリッドサーチ又はベイズ最適化等の方法により最適化することができる。
L (x i , x'i ) included in equation (5) is a loss function that characterizes the reconstruction error. For example, using the L2 norm, L (x i , x'i ) = || x i --x'i || 2 2 . The dimension of the vector z. (Σ k ) jj is the jth diagonal element of the covariance matrix Σ k . | ・ | Is a determinant. λ 1 and λ 2 are constants, for example, λ 1 = 0.1 and λ 2 = 0.005. The
学習装置6は、複数の動作前データを用いて、圧縮ネットワーク71及び推定ネットワーク72の学習を行う。演算部11は、圧縮ネットワーク71及び推定ネットワーク72の学習を行うことにより、学習モデル16を生成する処理を行う。S11では、演算部11は、複数の動作前データを生成し、複数の動作前データを記憶部63に記憶する。演算部11は、S12の処理は実行しない。S13では、演算部11は、学習モデル16を生成するために、複数の動作前データを訓練データとして、圧縮ネットワーク71及び推定ネットワーク72の教師無し学習を行う。演算部11は、複数の動作前データから複数のベクトルxを生成し、圧縮ネットワーク71及び推定ネットワーク72を利用して、複数のベクトルz、各クラスタの混合率φk 、各クラスタの平均μk 、各クラスタの共分散行列Σk 、及び目的関数Jを計算する。そして、演算部11は、目的関数Jが可及的に小さくなるように、圧縮ネットワーク71及び推定ネットワーク72のパラメータを調整する。
The learning device 6 learns the
演算部61は、調整された最終的なパラメータを記録した学習済みデータを記憶部63に記憶する。学習済みデータには、少なくとも、学習された圧縮ネットワーク71のパラメータが含まれる。また、学習済みデータには、学習後の各クラスタの混合率φk 、各クラスタの平均μk 、及び各クラスタの共分散行列Σk が含まれる。疲労状態判定装置1が備える学習モデル16は、学習済みデータに基づいて製造される。例えば、学習済みデータに記録されたパラメータが記憶部13に書き込まれることにより、学習モデル16が製造される。
The
図13は、実施形態2に係る学習モデル16の構成例を示す概念図である。学習モデル16は、圧縮ネットワーク164を有する。圧縮ネットワーク164は、学習された圧縮ネットワーク71と同等の自己符号化器である。一歩行の期間におけるX方向、Y方向及びZ方向の加速度、角速度及び地磁気の履歴を表したベクトルxは、圧縮ネットワーク164へ入力される。圧縮ネットワーク164は、ベクトルxの入力に応じて、再構築ベクトルx’及び潜在変数zc を出力する。学習モデル16は、誤差計算部165を有する。誤差計算部165は、ベクトルx及び再構築ベクトルx’から、再構築誤差に由来する特徴量zr を計算する。潜在変数zc 及び特徴量zr からベクトルzが得られる。
FIG. 13 is a conceptual diagram showing a configuration example of the
学習モデル16は、異常度計算部166を有している。異常度計算部166は、ベクトルzと、学習によって得られた混合率φk 、平均μk 及び共分散行列Σk とを用いて、異常度として、(4)により負の対数尤度E(z)を計算する。学習モデル16は、計算した異常度E(z)を、状態情報として出力する。混合率φk 、平均μk 及び共分散行列Σk は、記憶部13に記憶されている。
The
疲労状態判定装置1が判定の処理を実行する際には、演算部11は、S32で、一歩行の期間におけるX方向、Y方向及びZ方向の加速度、角速度及び地磁気の履歴からなるベクトルxを、学習モデル16へ入力する。ベクトルxを入力された学習モデル16は、圧縮ネットワーク164及び誤差計算部165の演算を行うことにより、ベクトルzを計算する。また、学習モデル16は、異常度計算部166の演算を行い、状態情報として異常度E(z)を出力する。異常度E(z)は、使用者4の状態が正常な状態からどの程度離れているのかを表す。状態情報の値が大きいほど、使用者4の状態が異常な状態である確率が高くなる。異常な状態とは、下肢の疲労を伴う動作を行った後の状態であると判定することが可能である。
When the fatigue state determination device 1 executes the determination process, the
複数のベクトルxが得られる場合は、演算部11は、ベクトルxの学習モデル16への入力と、学習モデル16からの状態情報の出力とを、複数のベクトルxの夫々について個別に実行する。複数のベクトルxの夫々について状態情報が出力され、複数の状態情報が得られる。
When a plurality of vectors x are obtained, the
S33では、演算部11は、状態情報の値が所定の閾値以下である場合に、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であると判定し、状態情報の値が所定の閾値を超過する場合に、使用者4の状態が下肢の疲労を伴う動作を行った後の状態であると判定する。例えば、閾値は、訓練データとは異なるテスト用の複数の動作前データに基づいて設定される。複数の動作前データから得られる複数のベクトルxが学習モデル16へ入力され、複数の状態情報が学習モデル16から出力され、複数の状態情報の大部分が閾値以下となるように、閾値が設定される。例えば、複数の状態情報の95%が閾値以下となるように、閾値が設定される。閾値は、記憶部13に記憶されている。或は、テスト用の複数の動作後データから得られる複数の状態情報の大部分が閾値を超過するように、閾値が設定されてもよい。演算部11は、状態情報の値が所定の閾値未満である場合に使用者4の状態が下肢の疲労を伴う動作を行う前の状態であると判定し、状態情報の値が所定の閾値以上である場合に、使用者4の状態が下肢の疲労を伴う動作を行った後の状態であると判定してもよい。複数の状態情報が得られている場合は、演算部11は、複数の状態情報に基づいて判定を行う。
In S33, when the value of the state information is equal to or less than a predetermined threshold value, the
なお、学習モデル16は、異常度E(z)を計算する際に、予め記憶された混合率φk 、平均μk 及び共分散行列Σk を用いるのではなく、異常度E(z)の計算の都度、混合率φk 、平均μk 及び共分散行列Σk を計算する形態であってもよい。この形態では、学習モデル16は、推定ネットワークを含み、推定ネットワークを用いてベクトルzからベクトルγを計算し、ベクトルγ及び訓練データから、混合率φk 、平均μk 及び共分散行列Σk を計算し、異常度E(z)を計算する。
The
実施形態2においても、学習モデル16は、適切な学習を行うことにより、適切に状態情報を出力する。実施形態3においても、適切な学習モデル16を利用することにより、使用者4が筋電計を長時間装着し続けることなく、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを簡便に判定することができる。動作前データを訓練データとした教師無し学習により学習モデル16を学習するので、動作後データを用いずに学習モデル16を生成することができる。訓練データとして動作後データを用意する必要が無く、被験者に負担を強いて動作後データを作成する必要がない。このため、容易に訓練データを作成し、学習モデル16を生成することができる。実施形態2では、異常検知モデルとしてDAGMMを利用した例を示したが、学習モデル16は、その他の異常検知モデルであってもよい。
Also in the second embodiment, the
<実施形態3>
実施形態1及び2では、x方向、y方向及びz方向の加速度、角速度及び地磁気を、X方向、Y方向及びZ方向の加速度、角速度及び地磁気へ変換し、X方向、Y方向及びZ方向の加速度、角速度及び地磁気を学習モデル16へ入力した。実施形態3では、学習モデル16は、x方向、y方向及びz方向の加速度、角速度及び地磁気を入力される。図14は、実施形態3に係る学習モデル16の機能を示す概念図である。学習モデル16には、一歩行の期間におけるx方向、y方向及びz方向の加速度の履歴と、一歩行の期間におけるx方向、y方向及びz方向の角速度の履歴と、一歩行の期間におけるx方向、y方向及びz方向の地磁気の履歴と、X方向、Y方向及びZ方向に対するx方向、y方向及びz方向の姿勢角と、下肢の筋電位の特徴量とが入力される。
<
In
学習モデル16は、一歩行の期間におけるx方向、y方向及びz方向の加速度、角速度及び地磁気の履歴と、姿勢角の履歴と、下肢の筋電位の特徴量とが入力された場合に、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す状態情報を出力するように学習されている。また、学習モデル16は、筋電位の特徴量に関わるノードを確率的に不活性化しながら学習されることによって、下肢の筋電位の特徴量が入力されず、加速度、角速度及び地磁気の履歴と姿勢角の履歴とが入力された場合に使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力するように、構成されている。
The
実施形態3では、疲労状態判定システム100は、S24を実行した後、S25及びS26を実行せず、疲労状態判定装置1は、S24で計算された姿勢角を記憶する。S31では、演算部11は、加速度、角速度及び地磁気の履歴と共に、一歩行の期間における姿勢角の履歴をも抽出する。S32では、演算部11は、加速度、角速度及び地磁気の履歴に加えて、姿勢角の履歴を学習モデル16へ入力する。また、演算部11は、筋電位の特徴量を学習モデル16へ入力せずに、学習モデル16に演算を行わせる。例えば、演算部11は、学習モデル16のノードの中で、筋電位の特徴量を入力されるノードと、加速度、角速度及び地磁気を用いずに筋電位の特徴量を用いて計算を行うノードとを不活性化する。学習モデル16は、筋電位の特徴量が入力されずに、加速度、角速度及び地磁気の履歴と姿勢角の履歴とを入力された場合に状態情報を出力するように機能する。実施形態3においても、学習モデル16は、適切な学習を行うことにより、適切に状態情報を出力する。実施形態3においても、適切な学習モデル16を利用することにより、使用者4が筋電計を長時間装着し続けることなく、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを簡便に判定することができる。
In the third embodiment, the fatigue
<実施形態4>
図15は、実施形態4に係る疲労状態判定システム100の構成例を示す模式図である。疲労状態判定システム100は、センサ装置3、及び端末装置2からなる。端末装置2は、学習モデル16を備えており、疲労状態判定装置として機能する。例えば、実施形態4では、学習モデル16は、コンピュータプログラム231に従って演算部21が情報処理を実行することにより実現される。端末装置2は、S23~S26の処理と、S31~S34の処理を実行する。実施形態4においても、適切な学習モデル16を利用することにより、使用者4が筋電計を長時間装着し続けることなく、使用者4の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを簡便に判定することができる。
<
FIG. 15 is a schematic diagram showing a configuration example of the fatigue
なお、疲労状態判定システム100は、センサ装置3が疲労状態判定装置として機能する形態であってもよい。この形態では、センサ装置3は、S22を実行せずに、S21、S23~S26及びS31~S34の処理を実行する。S34では、センサ装置3は、判定結果を端末装置2へ送信する。
The fatigue
実施形態1~4においては、x方向、y方向及びz方向と、X方向、Y方向及びZ方向とは、互いに直交する三つの方向であるとしたが、直角以外の角度で交差する二つの方向が含まれていてもよい。実施形態1~4においては、使用者4の片足にセンサ装置3が装着される形態を示したが、疲労状態判定システム100は、使用者4の両足の夫々にセンサ装置3が装着される形態であってもよい。疲労状態判定装置1は、使用者4の両足の夫々について使用者4の状態を判定してもよく、二つのセンサ装置3の測定結果の両方に基づいて使用者4の状態を判定してもよい。
In the first to fourth embodiments, the x direction, the y direction and the z direction, and the X direction, the Y direction and the Z direction are assumed to be three directions orthogonal to each other, but two intersecting at an angle other than the right angle. The direction may be included. In the first to fourth embodiments, the
本発明は上述した実施の形態の内容に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。即ち、請求項に示した範囲で適宜変更した技術的手段を組み合わせて得られる実施形態も本発明の技術的範囲に含まれる。 The present invention is not limited to the contents of the above-described embodiment, and various modifications can be made within the scope of the claims. That is, an embodiment obtained by combining technical means appropriately modified within the scope of the claims is also included in the technical scope of the present invention.
1 疲労状態判定装置
10 記録媒体
100 疲労状態判定システム
131 コンピュータプログラム
16 学習モデル
2 端末装置
3 センサ装置
4 使用者
5 通信ネットワーク
6 学習装置
1 Fatigue
Claims (12)
人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に、前記人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力する学習モデルへ、前記センサにより測定された加速度、角速度及び地磁気の履歴を入力し、
前記学習モデルが出力した前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定すること
を特徴とする疲労状態判定方法。 Acceleration, angular velocity and geomagnetism during walking are repeatedly measured by sensors attached to human feet.
Learning to output information indicating whether the person's state is a state before or after performing a movement accompanied by fatigue of the lower limbs when the history of acceleration, angular velocity, and geomagnetism during walking of the person is input. Input the history of acceleration, angular velocity and geomagnetism measured by the sensor into the model.
Fatigue state determination, which is characterized by determining whether the state of a person wearing the sensor on his / her foot is a state before or after performing the operation according to the information output by the learning model. Method.
人の歩行中の加速度、角速度及び地磁気の履歴と、前記人の足から得られた筋電位の特徴量とを入力された場合に、前記人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力するように、学習されており、
人の足から得られた筋電位の特徴量が入力されず、前記人の歩行中の加速度、角速度及び地磁気の履歴が入力された場合に、前記人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを示す情報を出力すること
を特徴とする請求項1に記載の疲労状態判定方法。 The learning model is
When the history of acceleration, angular velocity and geomagnetism during walking of a person and the feature amount of myoelectric potential obtained from the person's foot are input, the state of the person before the movement accompanied by fatigue of the lower limbs is performed. It has been trained to output information indicating whether it is in a state or a later state.
When the feature amount of myoelectric potential obtained from a person's foot is not input and the history of acceleration, angular velocity and geomagnetism during walking of the person is input, the person's state performs an action accompanied by fatigue of the lower limbs. The fatigue state determination method according to claim 1, wherein information indicating whether the state is a previous state or a later state is output.
前記軸の姿勢角を、加速度、角速度又は地磁気の履歴に基づいて計算し、
前記姿勢角に基づいて、加速度、角速度及び地磁気を補正すること
を特徴とする請求項1又は2に記載の疲労状態判定方法。 The sensor measures acceleration, angular velocity and geomagnetism in the direction along an axis fixed to the sensor.
The attitude angle of the axis is calculated based on the history of acceleration, angular velocity or geomagnetism.
The fatigue state determination method according to claim 1 or 2, wherein the acceleration, the angular velocity, and the geomagnetism are corrected based on the posture angle.
加速度、角速度及び地磁気を測定した夫々の時点における、地面に対して固定された軸に対する前記センサに対して固定された軸の姿勢角を、加速度、角速度及び地磁気の履歴に基づいて計算し、
前記姿勢角に基づいて、前記センサに対して固定された軸に沿った方向の加速度、角速度及び地磁気を、地面に対して固定された軸に沿った方向の加速度、角速度及び地磁気へ変換し、
変換後の加速度、角速度及び地磁気を前記学習モデルへ入力すること
を特徴とする請求項1又は2に記載の疲労状態判定方法。 The sensor measures acceleration, angular velocity and geomagnetism in the direction along an axis fixed to the sensor.
At each time when the acceleration, angular velocity and geomagnetism were measured, the attitude angle of the axis fixed to the sensor with respect to the axis fixed to the ground was calculated based on the history of acceleration, angular velocity and geomagnetism.
Based on the attitude angle, the acceleration, angular velocity and geomagnetism in the direction along the axis fixed to the sensor are converted into the acceleration, angular velocity and geomagnetism in the direction along the axis fixed to the ground.
The fatigue state determination method according to claim 1 or 2, wherein the converted acceleration, angular velocity, and geomagnetism are input to the learning model.
前記センサにより繰り返し測定された加速度、角速度及び地磁気の中から、一歩行の期間に測定された加速度、角速度及び地磁気の履歴を抽出し、
抽出した加速度、角速度及び地磁気の履歴を前記学習モデルへ入力すること
を特徴とする請求項1乃至4のいずれか一つに記載の疲労状態判定方法。 The learning model is a model that outputs the information when the history of acceleration, angular velocity, and geomagnetism in one walking period with the same foot is input.
From the acceleration, angular velocity and geomagnetism measured repeatedly by the sensor, the history of acceleration, angular velocity and geomagnetism measured during one walking period is extracted.
The fatigue state determination method according to any one of claims 1 to 4, wherein the extracted acceleration, angular velocity, and geomagnetic history are input to the learning model.
前記足が接地した時点から次に前記足が接地した時点までの期間に測定された加速度、角速度及び地磁気の履歴を、一歩行の期間に測定された加速度、角速度及び地磁気の履歴として抽出すること
を特徴とする請求項5に記載の疲労状態判定方法。 Based on the changes in acceleration and angular velocity, the time when the foot on which the sensor is attached touches the ground is specified.
The history of acceleration, angular velocity and geomagnetism measured during the period from the time when the foot touches the ground to the time when the foot touches the ground is extracted as the history of acceleration, angular velocity and geomagnetism measured during one walking period. 5. The method for determining a fatigue state according to claim 5.
複数の一歩行の期間について前記学習モデルが出力した複数の前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定すること
を特徴とする請求項5又は6に記載の疲労状態判定方法。 The history of acceleration, angular velocity and geomagnetism measured in each of a plurality of walking periods is individually input to the learning model.
It is determined whether the state of the person wearing the sensor on the foot is the state before or after the operation according to the plurality of information output by the learning model for the period of the plurality of walks. The fatigue state determination method according to claim 5 or 6, wherein the method is to be performed.
前記動作を行った後の人の足に装着されたセンサにより一歩行の期間に測定された加速度、角速度及び地磁気の履歴、並びに前記人の足から得られた筋電位の特徴量を作成し、
複数の一歩行の期間の夫々において測定された加速度、角速度及び地磁気の履歴と、筋電位の特徴量と、人の状態が前記動作を行う前の状態であるか後の状態であるかを示す情報とを訓練データとして、人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に前記人の状態が前記動作を行う前の状態であるか後の状態であるかを示す情報を出力する学習モデルを、生成すること
を特徴とする学習モデル生成方法。 Acceleration, angular velocity, and geomagnetic history measured during one walk by a sensor attached to a person's foot before performing movements involving lower limb fatigue, and the characteristic amount of myoelectric potential obtained from the person's foot. make,
Acceleration, angular velocity and geomagnetic history measured during one walk by a sensor attached to the person's foot after performing the above movement, and the feature amount of myoelectric potential obtained from the person's foot were created.
It shows the history of acceleration, angular velocity, and geomagnetism measured in each of a plurality of walking periods, the feature amount of myoelectric potential, and whether the human state is a state before or after the above movement. Using the information as training data, when the history of acceleration, angular velocity, and geomagnetism during walking of a person is input, information indicating whether the state of the person is a state before or after the operation is output. A learning model generation method characterized by generating a learning model.
複数の一歩行の期間の夫々において測定された加速度、角速度及び地磁気の履歴を訓練データとした教師無し学習によって、人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に、前記人の状態が前記動作を行う前の状態であるか後の状態であるかを示す情報として、前記人の状態の異常の程度を示す情報を出力する学習モデルを、生成すること
を特徴とする学習モデル生成方法。 Creates a history of acceleration, angular velocity and geomagnetism measured during one walk by a sensor attached to a person's foot before performing a motion with fatigue of the lower limbs.
When the history of acceleration, angular velocity and geomagnetism during walking of a person is input by unsupervised learning using the history of acceleration, angular velocity and geomagnetism measured in each of a plurality of walking periods as training data, the said person A learning model characterized by generating a learning model that outputs information indicating the degree of abnormality of the person's state as information indicating whether the state is a state before or after the operation. Generation method.
前記センサを足に装着した人の状態が下肢の疲労を伴う動作を行う前の状態であるか後の状態であるかを判定する疲労状態判定装置とを備え、
前記疲労状態判定装置は、
人の歩行中の加速度、角速度及び地磁気の履歴を入力した場合に、前記人の状態が前記動作を行う前の状態であるか後の状態であるかを示す情報を出力する学習モデルを備え、
前記センサが測定した加速度、角速度及び地磁気を取得し、
取得した加速度、角速度及び地磁気の履歴を前記学習モデルへ入力した場合に前記学習モデルが出力する前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定すること
を特徴とする疲労状態判定システム。 A sensor that is attached to a person's foot and repeatedly measures acceleration, angular velocity, and geomagnetism while the person is walking.
It is provided with a fatigue state determination device for determining whether the state of the person wearing the sensor on the foot is a state before or after performing an operation accompanied by fatigue of the lower limbs.
The fatigue state determination device is
It is equipped with a learning model that outputs information indicating whether the state of the person is a state before or after the operation when the history of acceleration, angular velocity, and geomagnetism during walking of the person is input.
Acquires the acceleration, angular velocity and geomagnetism measured by the sensor,
The state of the person wearing the sensor on his / her foot is the state before the operation according to the information output by the learning model when the acquired acceleration, angular velocity, and geomagnetic history are input to the learning model. A fatigue state determination system characterized by determining whether the condition is after or after.
人の足に装着されたセンサにより測定された歩行中の加速度、角速度及び地磁気を取得し、
取得した加速度、角速度及び地磁気の履歴を前記学習モデルへ入力した場合に前記学習モデルが出力する前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定すること
を特徴とする疲労状態判定装置。 Learning to output information indicating whether the person's state is a state before or after performing a movement accompanied by fatigue of the lower limbs when the history of acceleration, angular velocity, and geomagnetism during walking of the person is input. Equipped with a model,
Acquires acceleration, angular velocity and geomagnetism during walking measured by sensors attached to human feet,
The state of the person wearing the sensor on his / her foot is the state before the operation according to the information output by the learning model when the acquired acceleration, angular velocity, and geomagnetic history are input to the learning model. A fatigue state determination device characterized by determining whether the state is after or after.
前記学習モデルが出力する前記情報に応じて、前記センサを足に装着した人の状態が前記動作を行う前の状態であるか後の状態であるかを判定する
処理をコンピュータに実行させることを特徴とするコンピュータプログラム。 Learning to output information indicating whether the person's state is a state before or after performing a movement accompanied by fatigue of the lower limbs when the history of acceleration, angular velocity, and geomagnetism during walking of the person is input. Enter the history of acceleration, angular velocity and geomagnetism during walking measured by a sensor attached to the human foot into the model.
According to the information output by the learning model, the computer is made to execute a process of determining whether the state of the person wearing the sensor on the foot is the state before or after the operation. Characterized computer program.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020118768A JP2022015733A (en) | 2020-07-09 | 2020-07-09 | Fatigue state determination method, learning model generation method, fatigue state determination system, fatigue state determination device, and computer program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020118768A JP2022015733A (en) | 2020-07-09 | 2020-07-09 | Fatigue state determination method, learning model generation method, fatigue state determination system, fatigue state determination device, and computer program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022015733A true JP2022015733A (en) | 2022-01-21 |
Family
ID=80120880
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020118768A Pending JP2022015733A (en) | 2020-07-09 | 2020-07-09 | Fatigue state determination method, learning model generation method, fatigue state determination system, fatigue state determination device, and computer program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2022015733A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023176112A1 (en) * | 2022-03-18 | 2023-09-21 | 国立大学法人大阪大学 | Program, information processing method, and information processing device |
-
2020
- 2020-07-09 JP JP2020118768A patent/JP2022015733A/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023176112A1 (en) * | 2022-03-18 | 2023-09-21 | 国立大学法人大阪大学 | Program, information processing method, and information processing device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111902077B (en) | Calibration technique for hand state representation modeling using neuromuscular signals | |
| CN105688396B (en) | Movable information display system and movable information display methods | |
| Baghdadi et al. | Hip and trunk kinematics estimation in gait through Kalman filter using IMU data at the ankle | |
| Bonnet et al. | Monitoring of hip and knee joint angles using a single inertial measurement unit during lower limb rehabilitation | |
| Carpentier et al. | Center-of-mass estimation for a polyarticulated system in contact—a spectral approach | |
| Villeneuve et al. | Reconstruction of angular kinematics from wrist-worn inertial sensor data for smart home healthcare | |
| WO2021258333A1 (en) | Gait abnormality early identification and risk early-warning method and apparatus | |
| Li | [Retracted] Dance Motion Capture Based on Data Fusion Algorithm and Wearable Sensor Network | |
| Wu et al. | Gait phase prediction for lower limb exoskeleton robots | |
| JP2022015733A (en) | Fatigue state determination method, learning model generation method, fatigue state determination system, fatigue state determination device, and computer program | |
| Michael et al. | Learning predictive movement models from fabric-mounted wearable sensors | |
| Segura et al. | Analysis of recoverable falls via Microsoft Kinect: Identification of third-order ankle dynamics | |
| JP2021083562A (en) | Information processing device, calculation method, and program | |
| JP2022069956A (en) | Fatigue improvement method, learning model generation method, fatigue improvement system, fatigue improvement device, and computer program | |
| Lhoste et al. | Deep-Learning Estimation of Weight Distribution Using Joint Kinematics for Lower-Limb Exoskeleton Control | |
| CN114053679A (en) | Exercise training method and system | |
| KR20210040671A (en) | Apparatus for estimating displacement center of gravity trajectories and method thereof | |
| Mantashloo et al. | Lower body kinematics estimation during walking using an accelerometer | |
| Seifer et al. | Step length and gait speed estimation using a hearing aid integrated accelerometer: a comparison of different algorithms | |
| Vlutters | Long short-term memory networks for body movement estimation | |
| US20240303545A1 (en) | Learning device, data augmentation system, estimation device, learning method, and recording medium | |
| Liang et al. | Estimation of electrical muscle activity during gait using inertial measurement units with convolution attention neural network and small-scale dataset | |
| US20240237922A1 (en) | Estimation device, estimation system, estimation method, and recording medium | |
| US20240148317A1 (en) | Pelvic inclination estimation device, estimation system, pelvic inclination estimation method, and recording medium | |
| Emeli et al. | Towards Practical Deployment of a Robotic Mobile System for Early Detection of Cerebral Palsy in Infants |