JP2012103024A - Apparatus and method for correcting angular velocity sensor - Google Patents
Apparatus and method for correcting angular velocity sensor Download PDFInfo
- Publication number
- JP2012103024A JP2012103024A JP2010249460A JP2010249460A JP2012103024A JP 2012103024 A JP2012103024 A JP 2012103024A JP 2010249460 A JP2010249460 A JP 2010249460A JP 2010249460 A JP2010249460 A JP 2010249460A JP 2012103024 A JP2012103024 A JP 2012103024A
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- offset value
- velocity sensor
- unit
- sensitivity coefficient
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Gyroscopes (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
本発明は、角速度センサ補正技術に関し、特に角速度センサからの出力信号を補正するための値を導出する角速度センサ補正装置および角速度センサ補正方法に関する。 The present invention relates to an angular velocity sensor correction technique, and more particularly to an angular velocity sensor correction apparatus and an angular velocity sensor correction method for deriving a value for correcting an output signal from an angular velocity sensor.
車両用ナビゲーション装置では、一般的に、自立航法から算出された位置と、GPS(Global Positioning System)から算出された位置とが合成されることによって、最適な位置が推定される。自立航法では、車両の速度を示す速度パルスと、角速度センサによって計測された車両の旋回角速度とをもとに、前回の測位位置を更新することによって、現在の位置が算出される。このような方式のナビゲーション装置によれば、GPS衛星からの電波の受信が困難なトンネル、地下駐車場や高層ビルの谷間であっても、自立航法によって自車位置の導出が可能である。車両の旋回による角速度ωは、次の式によって導出される。
ω=(Vout−Voffset)/S ・・・(1)
ここで、Voutは、角速度センサの出力電圧であり、Voffsetは、角速度センサのオフセット値、S(mV/deg/sec)は、角速度センサの感度係数である。
In a vehicular navigation apparatus, generally, an optimum position is estimated by combining a position calculated from a self-contained navigation and a position calculated from a GPS (Global Positioning System). In the self-contained navigation, the current position is calculated by updating the previous positioning position based on the speed pulse indicating the speed of the vehicle and the turning angular speed of the vehicle measured by the angular speed sensor. According to such a type of navigation device, the position of the vehicle can be derived by self-contained navigation even in tunnels, underground parking lots and valleys of high-rise buildings where it is difficult to receive radio waves from GPS satellites. The angular velocity ω due to turning of the vehicle is derived by the following equation.
ω = (Vout−Voffset) / S (1)
Here, Vout is an output voltage of the angular velocity sensor, Voffset is an offset value of the angular velocity sensor, and S (mV / deg / sec) is a sensitivity coefficient of the angular velocity sensor.
角速度を正確に求めるためには、角速度センサのオフセット値と、感度係数を正確に求める必要がある。角速度センサの感度係数は、一般的に角速度センサの個体差や角速度センサの車両への取り付け角度により異なる。また、オフセット値は温度変化によって変化する可能性がある。つまり、オフセット値は、車両用ナビゲーション装置に使用される基板等の発熱や、車両用ナビゲーション装置が車両のダッシュボード等に取り付けられた場合の車両エンジン等の発熱による温度上昇の影響を受ける。従来、角速度センサのオフセット値は、角速度が「0」になる車両停止時や直進走行時の角速度センサからの出力電圧を用いて補正されていた。しかしながら、高速道路の走行や、交通量の少ない地域における長時間の走行等、車両の停止頻度が少ないケースでは、角速度センサのオフセット値を定期的に補正することが困難になり、オフセット値の精度が悪化しやすくなる。正確に角速度センサからの出力電圧が「0」になるような直進走行時のオフセット値補正についても、道路形状やドライバの運転状況に左右されやすいので、定期的に行うことが困難になる。また、角速度センサの感度係数は、単位期間内での方位変化量と、角速度センサの出力電圧とから導出される。そのため、式(1)から明らかなように、角速度センサの感度係数は、オフセット値の誤差の影響を受ける。 In order to accurately determine the angular velocity, it is necessary to accurately determine the offset value of the angular velocity sensor and the sensitivity coefficient. The sensitivity coefficient of the angular velocity sensor generally differs depending on the individual difference of the angular velocity sensor and the mounting angle of the angular velocity sensor to the vehicle. In addition, the offset value may change due to a temperature change. In other words, the offset value is affected by temperature rise due to heat generated by the substrate used in the vehicle navigation device or heat generated by the vehicle engine when the vehicle navigation device is attached to the dashboard of the vehicle. Conventionally, the offset value of the angular velocity sensor has been corrected by using the output voltage from the angular velocity sensor when the vehicle is stopped or is traveling straight ahead when the angular velocity is “0”. However, it is difficult to periodically correct the offset value of the angular velocity sensor in cases where the frequency of stoppage of the vehicle is low, such as traveling on a highway or traveling for a long time in an area with low traffic volume. Is likely to get worse. The offset value correction during straight running so that the output voltage from the angular velocity sensor accurately becomes “0” is also easily influenced by the road shape and the driving situation of the driver, and thus it is difficult to perform it periodically. The sensitivity coefficient of the angular velocity sensor is derived from the azimuth change amount within the unit period and the output voltage of the angular velocity sensor. Therefore, as is apparent from the equation (1), the sensitivity coefficient of the angular velocity sensor is affected by the error of the offset value.
直進走行以外の走行中であっても角速度センサのオフセットおよび感度係数を補正する技術が提案されている。そこでは、所定期間の角速度センサの出力電圧の平均値と、その平均値が算出される期間の車両の方位変化量をもとに、角速度センサのオフセット値および感度係数が補正されている。具体的に説明すると、角速度センサのオフセット値Voffsetは、次のように導出される。
Voffset=1/n・ΣVout−1/Δt・Δθ/n・S ・・・(2)
ここで、nは、角速度センサの出力電圧のサンプル数であり、Δt(sec)は、サンプリング間隔であり、Δθ(deg)は、方位変化量である。方位変化量は、GPS衛星から取得したGPS方位、あるいは地図データをもとに求められる。また、角速度センサの感度係数については、補正されたオフセット値の変化量が小さい、つまり安定した状態において、次のように導出される。
S=(1/n・ΣVout − Voffset)・n/Δθ・Δt ・・・(3)
ここで、Voffsetは、補正されたオフセット値の変化量が小さいような安定した状態において、既知であり定数とされる(例えば、特許文献1)。
There has been proposed a technique for correcting an offset and a sensitivity coefficient of an angular velocity sensor even during traveling other than straight traveling. There, the offset value and sensitivity coefficient of the angular velocity sensor are corrected based on the average value of the output voltage of the angular velocity sensor during a predetermined period and the amount of change in the direction of the vehicle during the period during which the average value is calculated. More specifically, the offset value Voffset of the angular velocity sensor is derived as follows.
Voffset = 1 / n · ΣVout−1 / Δt · Δθ / n · S (2)
Here, n is the number of samples of the output voltage of the angular velocity sensor, Δt (sec) is the sampling interval, and Δθ (deg) is the azimuth change amount. The azimuth change amount is obtained based on the GPS azimuth obtained from the GPS satellite or map data. Further, the sensitivity coefficient of the angular velocity sensor is derived as follows when the amount of change in the corrected offset value is small, that is, in a stable state.
S = (1 / n · ΣVout−Voffset) · n / Δθ · Δt (3)
Here, Voffset is known and is a constant in a stable state where the amount of change in the corrected offset value is small (for example, Patent Document 1).
このような状況下において、角速度センサの感度係数に対して、オフセット値の変化量が小さいような安定した状態になるまで、式(3)におけるVoffsetが安定しないことによって、サンプル数を増やすと、感度係数の誤差が増大する可能性がある。オフセット値が安定するまでには、一般的に、起動時から30分から1時間以上の期間を要する。そのため、例えば、30分程度以下の走行においては、角速度センサの感度係数を正確に補正することが非常に難しくなるとともに、角速度の導出精度も高くない。起動してから短期間に角速度の導出精度を向上させるためには、角速度センサのオフセット値を短期間で高精度に導出することが要求される。 Under such circumstances, when the number of samples is increased by the fact that Voffset in Equation (3) is not stable until a stable state in which the amount of change in the offset value is small with respect to the sensitivity coefficient of the angular velocity sensor, The sensitivity coefficient error may increase. In general, it takes a period of 30 minutes to 1 hour or more from the time of startup until the offset value is stabilized. For this reason, for example, when traveling for about 30 minutes or less, it is very difficult to accurately correct the sensitivity coefficient of the angular velocity sensor, and the accuracy of deriving the angular velocity is not high. In order to improve the accuracy of deriving the angular velocity in a short period after startup, it is required to derive the offset value of the angular velocity sensor with high accuracy in a short period.
また、角速度センサの感度係数を導出するための式(3)において、方位変化量Δθが、GPS衛星から取得したGPS方位から求められる場合、GPS衛星からの電波の受信状況によりGPS方位の精度が悪化するので、感度係数に含まれる誤差が大きくなる。また、式(3)において、方位変化量Δθが、地図データに基づいて求められる場合、地図データに基づく道路方位と車両の走行方位とが完全に一致するとは限らないので、感度係数に含まれる誤差が大きくなる。これらの場合でも、感度係数に含まれる誤差の低減が要求される。 Further, in the equation (3) for deriving the sensitivity coefficient of the angular velocity sensor, when the azimuth change amount Δθ is obtained from the GPS azimuth obtained from the GPS satellite, the accuracy of the GPS azimuth depends on the reception status of the radio wave from the GPS satellite. Since it deteriorates, the error included in the sensitivity coefficient increases. In addition, in the equation (3), when the direction change amount Δθ is obtained based on the map data, the road direction based on the map data and the traveling direction of the vehicle do not always coincide with each other, and thus are included in the sensitivity coefficient. The error increases. Even in these cases, it is required to reduce the error included in the sensitivity coefficient.
本発明はこうした状況に鑑みてなされたものであり、その目的は、短期間であっても角速度の導出精度を向上させる技術を提供することにある。 The present invention has been made in view of such circumstances, and an object thereof is to provide a technique for improving the accuracy of deriving angular velocity even in a short period.
上記課題を解決するために、本発明のある態様の角速度センサ補正装置は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得する取得部と、取得部において取得した角速度を少なくとも使用することによって、角速度センサのオフセット値を更新させながら順次導出するオフセット値導出部と、取得部において取得した測位データと角速度とをもとに、角速度センサの仮の感度係数を逐次導出する感度係数導出部と、感度係数導出部において逐次導出した角速度センサの仮の感度係数に対して統計処理を実行することによって、オフセット値導出部において導出した角速度センサのオフセット値とともに、角速度センサから出力された角速度を補正するための角速度センサの感度係数を導出する感度係数フィルタ処理部とを備える。感度係数フィルタ処理部は、オフセット値導出部において角速度センサのオフセット値を更新させる程度に応じて、統計処理の際の忘却係数を変更する。 In order to solve the above problems, an angular velocity sensor correction device according to an aspect of the present invention includes positioning data of an object measured based on a signal from a GPS satellite, and an angular velocity of the object output from the angular velocity sensor. An acquisition unit for acquiring the offset value, an offset value deriving unit for sequentially deriving the offset value of the angular velocity sensor by using at least the angular velocity acquired by the acquisition unit, and the positioning data and the angular velocity acquired by the acquisition unit. In addition, the sensitivity coefficient deriving unit that sequentially derives the temporary sensitivity coefficient of the angular velocity sensor, and the offset value deriving unit by executing statistical processing on the temporary sensitivity coefficient of the angular velocity sensor sequentially derived by the sensitivity coefficient deriving unit. In addition to the offset value of the angular velocity sensor derived in step 1, the angular velocity sensor is used to correct the angular velocity output from the angular velocity sensor. And a sensitivity coefficient filter process unit for deriving the angular velocity conversion coefficient. The sensitivity coefficient filter processing unit changes the forgetting factor at the time of statistical processing according to the degree to which the offset value deriving unit updates the offset value of the angular velocity sensor.
この態様によると、角速度センサのオフセット値を更新させる程度に応じて、仮の感度係数に対して統計処理を実行する際の忘却係数を設定するので、オフセット値のドリフトに応じて忘却係数を設定できる。 According to this aspect, the forgetting factor for executing the statistical processing is set for the temporary sensitivity coefficient according to the degree to which the offset value of the angular velocity sensor is updated, so the forgetting factor is set according to the offset value drift. it can.
感度係数導出部は、オフセット値導出部において角速度センサのオフセット値を更新させる程度が大きくなるほど、角速度センサの仮の感度係数のひとつを導出するための期間を短くしてもよい。また、角速度センサのオフセット値を更新させる程度が大きくなるほど、角速度センサの仮の感度係数のひとつを導出するための期間を短くするので、環境の変化の影響を低減できる。 The sensitivity coefficient deriving unit may shorten the period for deriving one of the temporary sensitivity coefficients of the angular velocity sensor as the offset value deriving unit updates the offset value of the angular velocity sensor. Also, as the degree of updating the offset value of the angular velocity sensor increases, the period for deriving one of the temporary sensitivity coefficients of the angular velocity sensor is shortened, so that the influence of environmental changes can be reduced.
本発明の別の態様は、角速度センサ補正方法である。この方法は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得するステップと、取得した角速度を少なくとも使用することによって、角速度センサのオフセット値を更新させながら順次導出するステップと、取得した測位データと角速度とをもとに、角速度センサの仮の感度係数を逐次導出するステップと、逐次導出した角速度センサの仮の感度係数に対して統計処理を実行することによって、導出した角速度センサのオフセット値とともに、角速度センサから出力された角速度を補正するための角速度センサの感度係数を導出するステップとを備える。角速度センサの感度係数を導出するステップは、角速度センサのオフセット値を更新させながら順次導出するステップにおいて角速度センサのオフセット値を更新させる程度に応じて、統計処理の際の忘却係数を変更する。 Another aspect of the present invention is an angular velocity sensor correction method. In this method, at least using the positioning data of the object measured based on the signal from the GPS satellite and the angular velocity of the object output from the angular velocity sensor, and using the acquired angular velocity, Deriving sequentially while updating the offset value of the angular velocity sensor, sequentially deriving a temporary sensitivity coefficient of the angular velocity sensor based on the obtained positioning data and angular velocity, and the temporary sensitivity of the angular velocity sensor derived sequentially Deriving a sensitivity coefficient of the angular velocity sensor for correcting the angular velocity output from the angular velocity sensor together with the offset value of the derived angular velocity sensor by performing statistical processing on the coefficient. The step of deriving the sensitivity coefficient of the angular velocity sensor changes the forgetting factor at the time of statistical processing according to the degree to which the offset value of the angular velocity sensor is updated in the step of deriving sequentially while updating the offset value of the angular velocity sensor.
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システム、記録媒体、コンピュータプログラムなどの間で変換したものもまた、本発明の態様として有効である。 It should be noted that any combination of the above-described constituent elements and a conversion of the expression of the present invention between a method, an apparatus, a system, a recording medium, a computer program, etc. are also effective as an aspect of the present invention.
本発明によれば、短期間であっても角速度の導出精度を向上できる。 According to the present invention, the accuracy of deriving angular velocity can be improved even in a short period.
本発明を具体的に説明する前に、まず概要を述べる。本発明の実施例は、車両等に搭載され、車両の旋回による角速度を導出する角速度算出装置に関する。角速度算出装置は、角速度センサからの出力電圧に対して、オフセット値と感度係数とを使用しながら、角速度を導出する。前述のごとく、角速度センサのオフセットは、温度の変動の影響を受ける。また、オフセット値の誤差は、感度係数の算出精度に影響を与える。その結果、このような状態において、角速度の精度が悪化している。これに対応するために、本実施例に係る角速度算出装置は、次の処理を実行する。 Before describing the present invention specifically, an outline will be given first. An embodiment of the present invention relates to an angular velocity calculation device that is mounted on a vehicle or the like and derives an angular velocity due to turning of the vehicle. The angular velocity calculation device derives an angular velocity for the output voltage from the angular velocity sensor while using the offset value and the sensitivity coefficient. As described above, the offset of the angular velocity sensor is affected by temperature fluctuations. In addition, an error in the offset value affects the accuracy of calculating the sensitivity coefficient. As a result, in such a state, the accuracy of the angular velocity is deteriorated. In order to cope with this, the angular velocity calculation apparatus according to the present embodiment executes the following processing.
角速度算出装置は、車両に搭載された角速度センサから出力電圧を入力するとともに、車両に搭載されたGPS受信機から測位データを入力する。ここで、角速度センサからの出力電圧が、車両の角速度に相当する。また、測位データには、車両の方位、車両の速度、車両の高度等が含まれる。角速度算出装置は、測位データと出力電圧とをもとに、車両の走行状態を推定する。走行状態として、例えば、停止状態、直進走行状態、非直進走行状態のいずれかが特定される。また、角速度算出装置は、走行状態に応じた導出方法にて仮のオフセット値を逐次導出する。さらに、角速度算出装置は、逐次導出した仮のオフセット値に対してフィルタ処理を実行する。ここで、フィルタは、ローパスフィルタに相当する。 The angular velocity calculation device inputs an output voltage from an angular velocity sensor mounted on the vehicle and inputs positioning data from a GPS receiver mounted on the vehicle. Here, the output voltage from the angular velocity sensor corresponds to the angular velocity of the vehicle. Further, the positioning data includes a vehicle direction, a vehicle speed, a vehicle altitude, and the like. The angular velocity calculation device estimates the traveling state of the vehicle based on the positioning data and the output voltage. As the traveling state, for example, any one of a stopped state, a straight traveling state, and a non-straight traveling state is specified. Further, the angular velocity calculating device sequentially derives a temporary offset value by a deriving method according to the traveling state. Furthermore, the angular velocity calculation device performs a filter process on the temporary offset value derived sequentially. Here, the filter corresponds to a low-pass filter.
また、フィルタに設定される忘却係数は、走行状態に応じて決定される。例えば、停止状態や直進走行状態では、仮のオフセット値の精度が高いので、過去の値の影響を小さくするような忘却係数が設定される。一方、非直進走行状態では、仮のオフセット値の精度が低いので、過去の値の影響を大きくするような忘却係数が設定される。フィルタの出力値がオフセット値に相当する。角速度算出装置は、測位データと出力電圧とをもとに、仮の感度係数を逐次導出する。また、角速度算出装置は、オフセット値の場合と同様に、逐次導出した仮の感度係数に対してフィルタ処理を実行する。フィルタの出力値が感度係数に相当する。最終的に、角速度算出装置は、角速度センサからの出力電圧、オフセット値、感度係数とをもとに角速度を算出する。 Further, the forgetting factor set in the filter is determined according to the traveling state. For example, since the accuracy of the temporary offset value is high in the stop state or the straight traveling state, a forgetting factor that reduces the influence of the past value is set. On the other hand, since the accuracy of the temporary offset value is low in the non-straight running state, a forgetting factor that increases the influence of the past value is set. The output value of the filter corresponds to the offset value. The angular velocity calculation device sequentially derives a temporary sensitivity coefficient based on the positioning data and the output voltage. In addition, the angular velocity calculation device performs a filtering process on the temporary sensitivity coefficient that is sequentially derived, as in the case of the offset value. The output value of the filter corresponds to the sensitivity coefficient. Finally, the angular velocity calculation device calculates the angular velocity based on the output voltage from the angular velocity sensor, the offset value, and the sensitivity coefficient.
このような構成において、次のような状況下においても、角速度の導出精度を向上できれば望ましい。走行状態が非直進走行時の場合に、過去のオフセット値の影響が大きいと、真のオフセット値に追随するのに時間を要する可能性がある。例えば、車両内でエアコンをON/OFFするとダッシュボードの温度が急に変化するため、それに伴いオフセット値も大きく変化する。このとき、過去のオフセット値の影響が大きくなるよう忘却係数が設定されていると、真のオフセット値に追随するまでの期間において、導出したオフセット値が誤差を含むようになる。さらに、オフセット値に誤差が含まれると、導出した感度係数も誤差を含むようになる。非直進走行時において周辺温度が大きく変動するような状況であっても角速度の導出精度を高めるためには、角速度センサのオフセット値を短期間で高精度に導出することが要求される。 In such a configuration, it is desirable if the accuracy of deriving the angular velocity can be improved even under the following circumstances. When the running state is non-straight running, if the influence of past offset values is large, it may take time to follow the true offset value. For example, when the air conditioner is turned ON / OFF in the vehicle, the temperature of the dashboard changes abruptly, and accordingly, the offset value also changes greatly. At this time, if the forgetting factor is set so as to increase the influence of the past offset value, the derived offset value includes an error in the period until the true offset value is followed. Further, when an error is included in the offset value, the derived sensitivity coefficient also includes an error. In order to improve the accuracy of deriving the angular velocity even in a situation where the ambient temperature varies greatly during non-straight running, it is required to derive the offset value of the angular velocity sensor with high accuracy in a short period of time.
これに対応するために、本実施例に係る角速度算出装置は、非直進走行状態の場合に、角速度センサから計算した方位変化とGPSから計算した方位変化の差分値について、過去からの変化量の絶対値を導出する。また、角速度算出装置は、一定期間における絶対値の変化量を導出し、絶対値の変化量に基づいて、オフセット値を導出するための忘却係数を変更させる。例えば、絶対値の変化量が所定値以上であれば、現在の仮のオフセット値の重みが大きくなるように忘却係数が変更され、オフセット値の変化への追随性が向上される。一方、絶対値の変化量が所定値より小さければ、現在の仮のオフセット値の重みが小さくなるように忘却係数が変更され、オフセット値の変化が小さいときの安定性が向上される。また、感度係数を導出するための忘却係数は、オフセット値を導出するための忘却係数に応じて変更される。例えば、温度の変動が微小でありオフセット値のドリフトが小さい場合は、オフセット値の導出精度が高く誤差が少ないので、過去の値の影響を小さくするような忘却係数が設定される。一方、温度の変動が大きくオフセットのドリフトが存在する場合は、過去の値の影響を大きくするような忘却係数が設定される。 In order to cope with this, the angular velocity calculation apparatus according to the present embodiment, in the case of a non-straight running state, determines the amount of change from the past with respect to the difference value between the azimuth change calculated from the angular velocity sensor and the azimuth change calculated from GPS. The absolute value is derived. In addition, the angular velocity calculation device derives the change amount of the absolute value in a certain period, and changes the forgetting factor for deriving the offset value based on the change amount of the absolute value. For example, if the change amount of the absolute value is equal to or greater than a predetermined value, the forgetting factor is changed so that the weight of the current temporary offset value is increased, and the followability to the change of the offset value is improved. On the other hand, if the change amount of the absolute value is smaller than the predetermined value, the forgetting factor is changed so that the weight of the current temporary offset value is reduced, and the stability when the change of the offset value is small is improved. The forgetting factor for deriving the sensitivity coefficient is changed according to the forgetting factor for deriving the offset value. For example, when the temperature fluctuation is small and the offset value drift is small, the accuracy of deriving the offset value is high and the error is small. Therefore, a forgetting factor that reduces the influence of the past value is set. On the other hand, when the temperature variation is large and there is an offset drift, a forgetting factor that increases the influence of the past value is set.
図1は、本発明の実施例に係る角速度算出装置100の構成を示す。角速度算出装置100は、測定部10、パラメータ演算部12、角速度変換部14、制御部34を含む。また、測定部10は、GPS測位部20、有効性判定部22、傾斜検出部24、角速度センサ26を含み、パラメータ演算部12は、オフセット値演算部28、感度係数演算部30、測位データ蓄積部32を含む。さらに信号として、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206、感度係数208、記憶データ210が含まれる。
FIG. 1 shows a configuration of an angular
GPS測位部20は、図示しないGPS衛星からの信号を受信して、GPS測位データ200を算出する。GPS測位データ200には、経緯度、車両の高度であるGPS高度、移動速度であるGPS速度、車両の方位であるGPS方位、PDOP(Position Dilution Precision)、捕捉衛星数等が含まれる。ここで、PDOPは、GPS測位データ200におけるGPS衛星位置の誤差が受信点位置にどのように反映されるかの指標であり、測位誤差に相当する。なお、GPS測位データ200には、これら以外の値が含まれていてもよい。また、GPS測位データ200の算出は、公知の技術によってなされればよいので、ここでは説明を省略する。また、GPS測位部20は、GPS測位データ200をサンプリング間隔ごとに、つまり周期的に算出する。GPS測位部20は、GPS測位データ200を有効性判定部22へ逐次出力する。
The
有効性判定部22は、GPS測位部20からのGPS測位データ200を逐次入力する。有効性判定部22は、GPS測位データ200から、GPS測位データ200それぞれの有効性を判定する。例えば、有効性判定部22は、PDOPの値が第1のしきい値以下であり、かつGPS速度が第2のしきい値以上である場合に、それらに対応したGPS方位が有効であると判定する。また、有効性判定部22は、上記の条件が満たされない場合に、対応したGPS方位が無効であると判定する。これは、一般的にPDOPの値が大きい場合やGPS速度が小さい場合に、GPS方位の精度が低くなる傾向があるからである。さらに具体的に説明すると、PDOPの値が6以下であり、かつGPS速度が20km/h以上である場合に、有効性判定部22は、GPS方位の有効性をフラグで表す。
The
また、有効性判定部22は、GPS速度が第3のしきい値以上である場合に、当該GPS速度が有効であると判定する。ここで、第3のしきい値は、第2のしきい値と同じでもよい。さらに、有効性判定部22は、所定の期間でのGPS高度の差が、第4のしきい値以下である場合に、当該GPS高度が有効であると判定する。このような処理の結果、有効性判定部22は、GPS測位データ200に含まれたGPS方位等の各値に対して、有効あるいは無効が示されたフラグを付加する(以下、フラグが付加されたGPS測位データ200もまた「GPS測位データ200」という)。有効性判定部22は、傾斜検出部24、オフセット値演算部28、感度係数演算部30、測位データ蓄積部32へGPS測位データ200を逐次出力する。
Moreover, the
傾斜検出部24は、有効性判定部22からGPS測位データ200、特にGPS測位データ200に含まれたGPS高度を逐次入力する。傾斜検出部24は、逐次入力したGPS高度をもとに、サンプリング間隔における車両の平均傾斜角度(以下、「傾斜角度204」という)を検出する。具体的に説明すると、傾斜検出部24は、連続したGPS高度の差異を逐次計算してから、計算結果を平均した後に、平均値をサンプリング間隔で除算することによって、傾斜角度204を導出する。ここで、連続したGPS高度の間隔が、サンプリング間隔に相当する。傾斜検出部24は、オフセット値演算部28、感度係数演算部30、測位データ蓄積部32へ傾斜角度204を出力する。
The
角速度センサ26は、例えば、振動ジャイロ等のジャイロ装置に相当し、車両の進行方向の変化を車両の相対的な角度変化として検出する。つまり、角速度センサ26は、車両の旋回角速度を検出する。検出された角速度は、例えば、0V〜5Vのアナログ信号として出力される。その際、時計回りの旋回に対応した正の角速度は5V側への2.5Vからの偏差電圧として出力され、反時計回りの旋回に対応した負の角速度は0V側への2.5Vからの偏差電圧として出力される。また、2.5Vは、角速度のオフセット値、つまり零点であり、温度等の影響を受けドリフトする。
The
また、2.5Vからの角速度の偏差程度である感度係数(mV/deg/sec)は、水平な状態において許容誤差内に収まる所定の値として定められている。この許容誤差原因は、ジャイロ装置の個体差や経年変化、温度による影響等である。ジャイロ装置の電圧値は、図示しないAD(Analog to Digital)変換装置によって、例えば、サンプリング間隔100msecでAD変換され、その結果のデジタル信号が出力される。当該デジタル信号は、前述の出力電圧に相当し、以下では、出力信号202という用語を使用する。なお、ジャイロ装置として、公知の技術が使用されればよいので、ここでは説明を省略する。角速度センサ26は、オフセット値演算部28、感度係数演算部30、測位データ蓄積部32、角速度変換部14へ出力信号202を出力する。
The sensitivity coefficient (mV / deg / sec), which is about the deviation of angular velocity from 2.5V, is determined as a predetermined value that falls within the allowable error in a horizontal state. The cause of this allowable error is the individual difference of the gyro device, the secular change, the influence of temperature, and the like. The voltage value of the gyro device is AD converted by an AD (Analog to Digital) converter (not shown), for example, at a sampling interval of 100 msec, and the resulting digital signal is output. The digital signal corresponds to the aforementioned output voltage, and hereinafter, the
オフセット値演算部28は、有効性判定部22からのGPS測位データ200、傾斜検出部24からの傾斜角度204、角速度センサ26からの出力信号202を入力する。また、オフセット値演算部28は、感度係数演算部30から感度係数208も入力する。オフセット値演算部28は、GPS測位データ200、出力信号202、傾斜角度204、感度係数208とをもとに、角速度センサ26のオフセット値(以下、「オフセット値206」という)を更新させながら順次算出する。なお、オフセット値演算部28での処理の詳細は後述する。オフセット値演算部28は、オフセット値206を角速度変換部14へ出力する。
The offset
感度係数演算部30は、有効性判定部22からのGPS測位データ200、傾斜検出部24からの傾斜角度204、角速度センサ26からの出力信号202を入力する。また、感度係数演算部30は、オフセット値演算部28からオフセット値206も入力する。感度係数演算部30は、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206とをもとに、角速度センサ26の感度係数(以下、前述の「感度係数208」という)を算出する。なお、感度係数演算部30での処理の詳細は後述する。感度係数演算部30は、感度係数208を角速度変換部14へ出力する。
The sensitivity
測位データ蓄積部32は、メモリ上のリングバッファ等で構成され、有効性判定部22からのGPS測位データ200、傾斜検出部24からの傾斜角度204、角速度センサ26からの出力信号202を逐次入力する。測位データ蓄積部32は、有効性判定部22において有効であると判定されたGPS測位データ200を取得し、オフセット値演算部28が後述の仮オフセット値212を導出した期間以前の所定期間、例えば10秒間連続して有効であった場合、GPS測位データ200、傾斜角度204、出力信号202を記憶データ210として記憶する。また、有効なGPS測位データが入力されるごとに、記憶データ210を更新する。測位データ蓄積部32は、入力されたGPS測位データ200が無効であった場合、記憶データ210の更新を行わない。また、所定期間、例えば60秒間連続して無効であった場合、記憶データ210をクリアする。測位データ蓄積部32は、記憶した記憶データ210をオフセット値演算部28へ出力する。
The positioning
角速度変換部14は、角速度センサ26からの出力信号202、オフセット値演算部28からのオフセット値206、感度係数演算部30からの感度係数208を入力する。角速度変換部14は、出力信号202、オフセット値206、感度係数208をもとに、前述の式(1)を計算することによって、車両の角速度ωを算出する。角速度変換部14は、角速度ωを出力する。制御部34は、角速度算出装置100全体の動作を制御する。
The angular
この構成は、ハードウエア的には、任意のコンピュータのCPU、メモリ、その他のLSIで実現でき、ソフトウエア的にはメモリにロードされたプログラムなどによって実現されるが、ここではそれらの連携によって実現される機能ブロックを描いている。したがって、これらの機能ブロックがハードウエアのみ、ソフトウエアのみ、またはそれらの組合せによっていろいろな形で実現できることは、当業者には理解されるところである。 This configuration can be realized in terms of hardware by a CPU, memory, or other LSI of any computer, and in terms of software, it can be realized by a program loaded in the memory, but here it is realized by their cooperation. Draw functional blocks. Accordingly, those skilled in the art will understand that these functional blocks can be realized in various forms by hardware only, software only, or a combination thereof.
図2は、オフセット値演算部28の構成を示す。オフセット値演算部28は、状態推定部40、状態別オフセット値導出部42、オフセット値フィルタ処理部44を含む。また、状態推定部40は、停止推定部50、直進走行推定部52、非直進走行推定部54を含み、状態別オフセット値導出部42は、停止時オフセット値導出部56、直進走行時オフセット値導出部58、非直進走行時オフセット値導出部60を含む。さらに信号として、仮オフセット値212、走行状態情報214が含まれる。
FIG. 2 shows a configuration of the offset
状態推定部40は、GPS測位データ200、出力信号202、傾斜角度204を入力する。状態推定部40は、停止推定部50、直進走行推定部52、非直進走行推定部54において、車両の走行状態を推定する。ここでは、車両の走行状態として、車両が停止あるいは直進している状態であるか、残りの状態、つまり非直進走行している状態であるかを推定する。また、状態推定部40は、判定結果を走行状態情報214としてオフセット値フィルタ処理部44へ出力する。
The
停止推定部50は、図示しない有効性判定部22において有効であると判定されたGPS測位データ200を取得する。また、停止推定部50は、GPS測位データ200からGPS速度を抽出し、GPS速度が「0」であるかを確認する。一方、停止推定部50は、所定期間内における出力信号202の分散値を計算し、分散値と第5のしきい値とを比較する。停止推定部50は、GPS速度が0であり、かつ分散値が第5のしきい値よりも小さい場合に、車両が停止状態であると判定する。前述のごとく、GPS速度が小さい場合、その精度は低くなる傾向があるが、停止推定部50は、出力信号202の分散値を併せて使用することによって停止と判断する。ここで、所定期間は、例えば、GPS速度のサンプリング間隔である1secとされる。所定期間において、出力信号202の分散値が小さいときは、車両の揺れ等がない安定した状態であると推定される。停止推定部50は、停止状態ではないと判定した場合、その旨を非直進走行推定部54へ出力する。
The
直進走行推定部52は、図示しない有効性判定部22において有効であると判定されたGPS測位データ200を取得する。また、直進走行推定部52は、GPS測位データ200からGPS方位を抽出し、GPS方位の所定期間にわたる変化(以下、「GPS方位変化」という)を導出する。さらに、直進走行推定部52は、GPS方位変化が「0」であるかを確認する。また、直進走行推定部52は、所定期間における出力信号202の分散値を計算し、分散値と第6のしきい値とを比較する。なお、第6のしきい値は、第5のしきい値と同一であってもよい。ここで、所定期間は、例えば、GPS方位変化が連続して0であるような期間に設定される。
The straight traveling
直進走行推定部52は、GPS方位変化が0であり、かつ分散値が第6のしきい値よりも小さい場合に、車両が直進走行状態であると判定する。所定期間において、出力信号202の分散値が小さいときは、微妙な蛇行等の影響がない直進走行状態であると推定される。なお、ドライバの運転状況や道路形状によるが、例えば、市街地等において、直進走行状態の検出頻度は、一般的に、停止推定部50による停止状態の判定よりも少なく、その期間は数秒間程度である。直進走行推定部52は、直進走行状態ではないと判定した場合、その旨を非直進走行推定部54へ出力する。ここで、停止推定部50において停止状態と判定され、直進走行推定部52において直進走行状態であると判定された場合、停止推定部50の判定結果が優先される。非直進走行推定部54は、停止推定部50から、停止状態ではない旨を入力し、かつ直進走行推定部52から、直進走行状態ではない旨を入力した場合、車両が非直進走行状態であると判定する。
The straight traveling
状態別オフセット値導出部42は、GPS測位データ200、出力信号202、傾斜角度204、感度係数208を入力する。状態別オフセット値導出部42は、状態推定部40において推定した車両の走行状態に応じて、角速度センサ26の仮オフセット値212を逐次導出する。ここで、停止推定部50において停止状態と判定された場合、停止時オフセット値導出部56が出力信号202をもとに仮オフセット値212を逐次導出する。また、直進走行推定部52において直進走行状態と判定された場合、直進走行時オフセット値導出部58が出力信号202をもとに仮オフセット値212を逐次導出する。
The state-specific offset
また、直進走行時オフセット値導出部58において非直進走行状態と判定された場合、非直進走行時オフセット値導出部60がGPS測位データ200、出力信号202、傾斜角度204、感度係数208をもとに仮オフセット値212を逐次導出する。つまり、車両の走行状態に応じて停止時オフセット値導出部56から非直進走行時オフセット値導出部60は、GPS測位データ200、出力信号202等の組合せを変更しながら、仮オフセット値212を導出する。
Further, when it is determined in the straight travel offset value deriving unit 58 that the non-straight travel state is determined, the non-straight travel offset value deriving unit 60 uses the
停止時オフセット値導出部56は、停止状態と判定された場合に、出力信号202をもとに、角速度センサ26の仮オフセット値212を逐次導出する。具体的に説明すると、停止時オフセット値導出部56は、停止時に車両の旋回角速度が「0」になることを利用し、出力信号202の平均値を仮オフセット値212として算出する。直進走行時オフセット値導出部58は、直進走行状態と判定された場合に、出力信号202をもとに、角速度センサ26の仮オフセット値212を逐次導出する。具体的に説明すると、ここでも車両の旋回角速度が0であるので、直進走行時オフセット値導出部58は、出力信号202の平均値を仮オフセット値212として算出する。
The stop-time offset value deriving unit 56 sequentially derives the temporary offset
非直進走行時オフセット値導出部60は、非直進走行状態であると判定された場合に、GPS測位データ200中のGPS方位、傾斜角度204、出力信号202、感度係数208とをもとに、例えば、GPS方位のサンプリング間隔における仮オフセット値212を逐次導出する。ここで、仮オフセット値212は、次のように導出される。
Goffset=1/n・ΣGout−Δθ・Gsensitivity・cos(α) ・・・(4)
ここで、nは、GPS方位のサンプリング間隔における出力信号202のサンプル数であり、ΣGout(mV)は、GPS方位のサンプリング間隔における出力信号202の合計値である。また、Δθ(deg)は、GPS方位変化量であり、Gsensitivity(mV/deg/sec)は、感度係数208であり、α(deg)は、車両の傾斜角度204である。
When it is determined that the vehicle is in a non-straight running state, the offset value deriving unit 60 during non-straight running is based on the GPS heading,
Goffset = 1 / n · ΣGout−Δθ · Gsensitivity · cos (α) (4)
Here, n is the number of samples of the
感度係数208は、通常、図示しない感度係数演算部30から入力されるが、角速度算出装置100の起動直後などのような状態において、感度係数208が未だ算出されていないこともありえる。そのような場合、非直進走行時オフセット値導出部60は、図示しないジャイロ装置の仕様によって決定される感度係数208を初期値として使用する。また、非直進走行時オフセット値導出部60は、前回の走行終了時に感度係数演算部30からの感度係数208を記憶しておき、初期値として使用してもよい。
The
オフセット値フィルタ処理部44は、状態別オフセット値導出部42において逐次導出した仮オフセット値212を入力する。オフセット値フィルタ処理部44は、仮オフセット値212に対して統計処理を実行することによって、角速度センサ26のオフセット値206を導出する。以下では、図3を使用しながら、オフセット値フィルタ処理部44での処理を説明する。
The offset value
図3は、オフセット値フィルタ処理部44の構成を示す。オフセット値フィルタ処理部44は、αi乗算部70、加算部72、1−αi乗算部74、忘却係数設定部76、忘却係数制御部78を含む。図示のごとく、オフセット値フィルタ処理部44は、IIR(Infinite Impulse Responce)フィルタを含むように構成されており、IIRフィルタによってローパスフィルタを構成する。αi乗算部70は、仮オフセット値212に忘却係数「αi」を乗算する。ここで、「i」は、1あるいは2である。そのため、忘却係数「αi」は、α1、α2の総称である。なお、α1およびα2については後述する。αi乗算部70は、乗算結果を加算部72へ出力する。
FIG. 3 shows a configuration of the offset value
加算部72は、αi乗算部70からの乗算結果と、1−αi乗算部74からの乗算結果とを逐次加算する。加算部72は、加算結果をオフセット値206として逐次出力する。1−αi乗算部74は、オフセット値206に係数「1−αi」を乗算する。なお、係数「1−αi」のうちの「αi」は、αi乗算部70でのαiと同様であるので、ここでは説明を省略する。1−αi乗算部74は、加算部72へ乗算結果をフィードバックする。忘却係数設定部76は、走行状態情報214を入力する。また、忘却係数設定部76は、走行状態情報214にて示された状態に応じて、忘却係数「αi」の値を決定する。さらに、忘却係数設定部76は、決定した忘却係数「αi」をαi乗算部70および1−αi乗算部74へ設定する。
The
図4は、忘却係数設定部76において記憶されるテーブルのデータ構造を示す。図示のごとく、走行状態欄300、忘却係数欄302が含まれる。走行状態欄300には、走行状態情報214にて示される各状態が含まれる。忘却係数欄302には、各状態に対応した忘却係数「αi」を記憶する。つまり、停止状態と直進走行状態に対して忘却係数「α1」が対応づけられ、非直進走行状態に対して忘却係数「α2」が対応づけられる。ここで、α2<α1の規定がなされる。また、α1は固定値であるが、α2は可変値である。図3に戻る。忘却係数制御部78は、感度係数208、記憶データ210をもとに、忘却係数「α2」の値を決定し、決定した忘却係数「α2」の値を忘却係数設定部76へ出力する。
FIG. 4 shows the data structure of the table stored in the forgetting
ここでは、忘却係数を変更する理由を説明する。オフセット値フィルタ処理部44の構成より、時刻tにおけるオフセット値206Voffset(t)は、次のように示される。
Voffset(t)=αiGoffset(t)+(1−αi)Voffset(t−1) ・・・(5)
なお、Goffset(t)は、時刻tにおける仮オフセット値212である。つまり、αiが大きくなると、Voffset(t)のうちのGoffset(t)の影響が大きくなり、αiが小さくなると、Voffset(t)のうちのVoffset(t−1)の影響が多くなる。これは、前者の場合において新しい仮オフセット値212の影響が大きくなり、後者の場合において過去のオフセット値206の影響が大きくなることに相当する。
Here, the reason for changing the forgetting factor will be described. Due to the configuration of the offset value
Voffset (t) = αiGoffset (t) + (1−αi) Voffset (t−1) (5)
Goffset (t) is the temporary offset
例えば、停止状態あるいは直進走行状態において、仮オフセット値212は、車両の旋回角速度が0である状態の出力信号202から導出されるので、その信頼度は高い。そのため、これらの状態において順次導出されるオフセット値206に対して、非直進走行状態よりも、新たに導出された仮オフセット値212の重み付けを大きくした平均化処理がなされる。これは、過去の仮オフセット値212の影響が小さくなるような忘却係数を使用することに相当する。
For example, in the stop state or the straight traveling state, the temporary offset
一方、非直進走行時においては、式(4)のGPS方位変化量から求められるΔθや車両の平均傾斜角度αに誤差等が含まれる可能性がある。ここで、仮オフセット値212のドリフトは温度による影響等によるものであるので、仮オフセット値212の変動にはある連続性を持った特性が存在すると推測される。そのため、その特性に適したローパスフィルタを使用することによって、式(4)から導かれたオフセット値に含まれる誤差を吸収できる。具体的には、その特性に適したローパスフィルタとは、過去の仮オフセット値212の影響が大きくなるような忘却係数を使用することに相当する。
On the other hand, during non-straight running, there may be an error or the like in Δθ obtained from the GPS azimuth change amount of Equation (4) or the average inclination angle α of the vehicle. Here, since the drift of the temporary offset
図5は、忘却係数制御部78の構成を示す。忘却係数制御部78は、GPS方位変化演算部80、自立航法方位変化演算部82、差分演算部84、差分絶対値演算部86、忘却係数演算部88を含む。GPS方位変化演算部80と自立航法方位変化演算部82は、測位データ蓄積部32から出力される記憶データ210を入力する。GPS方位変化演算部80は、記憶データ210に含まれるGPS方位データから、所定期間におけるGPS方位の変化量(以下、「GPS方位変化量」という)を算出し、GPS方位変化量を差分演算部84へ出力する。自立航法方位変化演算部82は、記憶データ210に含まれる角速度データおよび傾斜角度と、感度係数208と、仮オフセット値212から、式(1)を用いて角速度を算出し、角速度を所定期間にわたって積算することによって、自立航法による方位の変化量(以下、「自立航法方位変化量」という)を算出する。自立航法方位変化演算部82は、自立航法方位変化量を差分演算部84へ出力する。
FIG. 5 shows a configuration of the forgetting
差分演算部84は、GPS方位変化演算部80からGPS方位変化量を入力するとともに、自立航法方位変化演算部82から自立航法方位変化量を入力する。差分演算部84は、GPS方位変化量と自立航法方位変化量との差分値を算出し、差分値を差分絶対値演算部86へ出力する。差分絶対値演算部86は、差分演算部84からの差分値を順次入力する。差分絶対値演算部86は、差分値を前回の差分値と比較し、それらの差分の絶対値を導出する。当該絶対値は、差分値の変化量の絶対値に相当する。例えば、入力された値が0.5(deg)、前回に入力された値が0.3(deg)のとき、変化量の絶対値は0.2になる。差分絶対値演算部86は、変化量の絶対値を忘却係数演算部88へ出力する。
The
忘却係数演算部88は、差分絶対値演算部86からの絶対値を逐次入力する。忘却係数演算部88は、一定期間にわたる絶対値の変化量を導出し、絶対値の変化量をもとに、オフセット値フィルタ処理部44での忘却係数「α2」を調節する。具体的には、絶対値の変化量が第7のしきい値以上である場合は、オフセット値の実際の変動に追随できていないと推定してα2が大きくなるように制御し、第8のしきい値より小さい場合は、追随できていると判断してα2が小さくなるように制御する。つまり、忘却係数演算部88は、絶対値の変化量が大きくなるほど、角速度センサ26のオフセット値導出において、新たに導出した仮オフセット値212の影響が大きくなるような忘却係数「α2」を設定する。例えば、絶対値の変化量が0.1(deg)以上であった場合に、忘却係数演算部88は、α2へ0.01加算する等の処理を行う。また、第7のしきい値と第8のしきい値は、例えば、「0」のように同じ値でもよい。その結果、忘却係数演算部88は、図4のテーブルのα2を更新する。ここで、記憶データ210の入力がない場合も考えられるが、そのときは予め設定したα2の初期値で図4のテーブルのα2を更新する。また、ここでは、非直進走行推定部54が対象物の走行状態として非直進走行状態を推定した場合に、忘却係数演算部88は、上記の処理を実行する。
The forgetting
図3に戻る。忘却係数設定部76は、図4のテーブルを参照しながら、走行状態情報214にて示された状態から忘却係数「α1」あるいは「α2」を選択する。このように、忘却係数設定部76は、車両の走行状態に応じて、フィルタ処理の際の忘却係数を変更する。また、オフセット値フィルタ処理部44は、導出したオフセット値206にα2を付加する(以下、α2が付加されたオフセット値206もまた「オフセット値206」という)。
Returning to FIG. The forgetting
図6は、感度係数演算部30の構成を示す。感度係数演算部30は、感度係数導出部90、感度係数フィルタ部92、忘却係数制御部94を含む。感度係数導出部90は、GPS測位データ200、出力信号202、傾斜角度204を入力する。また、感度係数演算部30は、オフセット値206も入力する。また、感度係数導出部90は、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206とをもとに、角速度センサ26の仮の感度係数を逐次導出する。
FIG. 6 shows the configuration of the sensitivity
具体的に説明すると、感度係数導出部90は、GPS測位データ200においてGPS方位が有効であると示されている場合、次のように、GPS方位のサンプリング間隔における角速度センサ26の仮の感度係数を算出する。
Gsensitivity=(1/n・ΣGout−Goffset)/Δθ/cos(α) ・・・(6)
ここで、Goffsetは、図示しないオフセット値演算部28から入力されるが、角速度算出装置100の起動直後などのような状態において、オフセット値206が未だ算出されていないこともありえる。式(6)には、Δθによる除算が含まれるので、Δθが所定値以上であるときに感度係数を算出する。Δθの値が所定値以下であるときは、感度係数導出部90は、直前に補正した感度係数を出力する。
Specifically, when the
Gsensitivity = (1 / n · ΣGout−Goffset) / Δθ / cos (α) (6)
Here, Goffset is input from an offset value calculation unit 28 (not shown), but it is possible that the offset
感度係数フィルタ部92は、感度係数導出部90において逐次導出した仮の感度係数を入力する。感度係数フィルタ部92は、仮の感度係数に対して統計処理を実行することによって、角速度センサ26の感度係数208を導出する。感度係数フィルタ部92は、図3に示されたオフセット値フィルタ処理部44と同様に、IIRフィルタにて構成されており、IIRフィルタは、ローパスフィルタを構成する。その結果、式(6)におけるGPS方位変化量から求められるΔθや、車両の平均傾斜角度αに含まれる誤差が吸収される。また、感度係数フィルタ部92は、忘却係数制御部94からの指示をもとに、IIRフィルタでの忘却係数を設定する。
The sensitivity
詳しくは、時刻tにおける感度係数208:S(t)は、次のように示される。
S(t)=αiGsensitivity(t)+(1−αi)S(t−1) ・・・(7)
なお、Gsensitivity(t)は、時刻tにおける仮感度係数である。つまり、αiが大きくなると、S(t)のうちのGsensitivity(t)の影響が大きくなり、αiが小さくなると、S(t)のうちのS(t−1)の影響が多くなる。これは、前者の場合において新しい仮感度係数の影響が大きくなり、後者の場合において過去の感度係数208の影響が大きくなることに相当する。
Specifically, the
S (t) = αiGsensitivity (t) + (1-αi) S (t−1) (7)
Gsensitivity (t) is a temporary sensitivity coefficient at time t. That is, as αi increases, the effect of Gsensititivity (t) in S (t) increases, and as αi decreases, the effect of S (t−1) in S (t) increases. This corresponds to an increase in the influence of the new temporary sensitivity coefficient in the former case and an increase in the influence of the
忘却係数制御部94は、オフセット値206の忘却係数α2に応じて、感度係数フィルタ部92での忘却係数を変更する。これは、オフセット値フィルタ処理部44において角速度センサのオフセット値を更新させる程度に応じて、感度係数フィルタ部92での統計処理の際の忘却係数を変更することに相当する。また、忘却係数制御部94は、変更した忘却係数の使用を感度係数フィルタ部92に設定する。図7は、感度係数フィルタ部92において記憶されるテーブルのデータ構造を示す。図示のごとく、条件欄400、忘却係数欄402が示される。条件欄400には、忘却係数を決定するためのオフセット値206に含まれる忘却係数の条件として、「x以上」、「x未満」が示されている。忘却係数欄402には、条件欄400での各条件に対応した忘却係数の値が示される。具体的には、「x以上」の場合に対して、忘却係数α10が設定されており、「x未満」の場合に対して、忘却係数α11が規定されている。また、α10<α11の関係が規定されている。つまり、x以上の場合はオフセット値206の変動が大きいので、x未満の場合よりも、新たに導出された仮の感度係数の重み付けを小さくした平均化処理がなされる。
The forgetting
また、ここでは、GPS方位のサンプリング間隔における仮の感度係数を算出する例を示したが、Goffsetおよびαの変動が微小である場合、あるいはΔθの値が所定値以上にならない場合は、算出の間隔が大きくされてもよい。つまり、仮の感度係数の導出は、GPS方位のサンプリング間隔に限定されない。さらに、オフセット値206を導出するための忘却係数α2がx以上の場合は、仮の感度係数を算出する間隔をx未満の場合より小さくしてもよい。つまり、オフセット値フィルタ処理部44において角速度センサのオフセット値を更新させる程度が大きくなるほど、角速度センサの仮の感度係数のひとつを導出するための期間を短くしてもよい。
In addition, here, an example is shown in which a temporary sensitivity coefficient is calculated at the sampling interval of the GPS direction. However, when the variation in Goffset and α is very small, or when the value of Δθ does not exceed a predetermined value, The interval may be increased. That is, the derivation of the provisional sensitivity coefficient is not limited to the GPS azimuth sampling interval. Further, when the forgetting factor α2 for deriving the offset
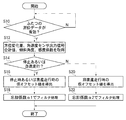
以上の構成による角速度算出装置100の動作を説明する。図8は、角速度算出装置100によるオフセット値の導出手順を示すフローチャートである。有効性判定部22は、GPS測位部20において測位されたふたつのGPS測位データ200の有効性を判定する(S10)。ふたつのGPS測位データ200は、サンプリング間隔時間だけ離れたタイミングでのGPS測位データ200に相当する。有効でなければ(S10のN)、待機する。ともに有効であれば(S10のY)、オフセット値演算部28は、GPS測位データ200のサンプリング間隔における車両のGPS方位変化量と、角速度センサ26の出力信号202の合計値、傾斜検出部24が出力する車両の傾斜角度204、感度係数演算部30が出力する感度係数208を取得する(S12)。
The operation of the angular
状態推定部40は、取得した各種情報をもとに、車両の走行状態が停止あるいは直進走行状態であるかを判定する(S14)。停止あるいは直進走行状態であれば(S14のY)、停止時オフセット値導出部56あるいは直進走行時オフセット値導出部58は、取得した各種情報をもとに角速度センサ26の仮オフセット値212を算出する(S16)。オフセット値フィルタ処理部44は、忘却係数α1でフィルタ処理を実行する(S18)。一方、停止あるいは直進走行状態でなければ(S14のN)、非直進走行時オフセット値導出部60は、取得した各種情報をもとに角速度センサ26の仮オフセット値212を算出する(S20)。オフセット値フィルタ処理部44は、忘却係数α2でフィルタ処理を実行する(S22)。
The
図9は、角速度算出装置100による忘却係数α2の導出手順を示すフローチャートである。測位データ蓄積部32から記憶データ210が入力されない場合(S70のN)、待機する。忘却係数制御部78は、測位データ蓄積部32から記憶データ210が入力された場合(S70のY)、GPS方位変化演算部80において所定期間のGPS方位変化量を算出し、自立航法方位変化演算部82において自立航法方位変化量を算出する(S72)。差分演算部84は、GPS方位変化演算部80と自立航法方位変化演算部82から入力したそれぞれの方位変化量の差分を算出し(S74)、差分絶対値演算部86へ出力する。差分絶対値演算部86は、方位変化差分の絶対値を算出し(S76)、前回の値との差分を忘却係数演算部88へ出力する。忘却係数演算部88は、逐次入力した絶対値の変化量が第7のしきい値以上であった場合(S78のY)、α2へ所定値を加算する(S80)。絶対値の変化量が第7のしきい値未満の場合(S78のN)、さらに絶対値の変化量が第8のしきい値より小さいかどうかを判断する(S82)。忘却係数演算部88は、絶対値の変化量が第8のしきい値より小さい場合(S82のY)、α2へ所定値を減算する(S84)。絶対値の変化量が第8のしきい値より小さくない場合(S82のN)、処理は終了される。
FIG. 9 is a flowchart showing a procedure for deriving the forgetting factor α2 by the angular
図10は、角速度算出装置100による感度係数の導出手順を示すフローチャートである。有効性判定部22は、GPS測位部20において測位されたふたつのGPS測位データ200の有効性を判定する(S40)。ふたつのGPS測位データ200は、サンプリング間隔時間だけ離れたタイミングでのGPS測位データ200に相当する。有効でなければ(S40のN)、待機する。ともに有効であれば(S40のY)、感度係数演算部30は、GPS測位データ200のサンプリング間隔における車両のGPS方位変化量と、角速度センサ26の出力信号202の合計値、傾斜検出部24が出力する車両の傾斜角度204、オフセット値演算部28が出力するオフセット値206を取得する(S42)。
FIG. 10 is a flowchart showing the procedure for deriving the sensitivity coefficient by the angular
感度係数導出部90は、取得したGPS方位変化量が所定値以上でないと判定すれば(S44のN)、ステップ40に戻る。一方、感度係数導出部90は、取得したGPS方位変化量が所定値以上であると判定すれば(S44のY)、取得した各種情報に基づいて角速度センサ26の仮の感度係数を導出する(S46)。感度係数フィルタ部92は、オフセット値206に含まれる忘却係数がしきい値以上であるかを判定し(S48)、しきい値以上であれば(S48のY)、図7に示したα10を忘却係数として設定し、仮の感度係数に対してフィルタ処理を実行する(S50)。しきい値以上でなければ(S48のN)、感度係数フィルタ部92は、α11を忘却係数として設定し、仮の感度係数に対してフィルタ処理を実行する(S52)。
If the sensitivity
本発明の実施例によれば、GPS方位変化量と自立航法方位変化量との差分の変化量をもとに、忘却係数を設定するので、現在の仮のオフセット値に適した忘却係数を設定できる。また、現在の仮のオフセット値に適した忘却係数が設定されるので、短期間であってもオフセット値に含まれる誤差を低減できる。また、GPS方位変化量と自立航法方位変化量との差分の変化量の絶対値を算出し、その絶対値の変化量が大きくなるほど、新たに導出した仮のオフセット値の影響が大きくなるような忘却係数を設定するので、オフセット値の実際の変動に追従できる。また、その絶対値の変化量が小さくなるほど、新たに導出した仮のオフセット値の影響が小さくなるような忘却係数を設定するので、オフセット値の安定性を向上できる。また、非直進走行状態の場合に忘却係数の調節を実行するので、オフセット値がずれやすい場合に忘却係数の微調節を実行できる。また、忘却係数の微調節が実行されるので、オフセット値の推定精度の悪化を抑制できる。また、オフセット値の推定精度の悪化が抑制されるので、角速度の推定精度を向上できる。 According to the embodiment of the present invention, the forgetting factor is set based on the change amount of the difference between the GPS azimuth change amount and the autonomous navigation azimuth change amount, so the forgetting factor suitable for the current temporary offset value is set. it can. In addition, since a forgetting factor suitable for the current temporary offset value is set, errors included in the offset value can be reduced even in a short period. Also, the absolute value of the difference between the GPS azimuth change and the self-contained navigation azimuth change is calculated, and as the absolute value change increases, the influence of the newly derived temporary offset value increases. Since the forgetting factor is set, it is possible to follow the actual fluctuation of the offset value. In addition, since the forgetting factor is set such that the influence of the newly derived temporary offset value becomes smaller as the change amount of the absolute value becomes smaller, the stability of the offset value can be improved. Further, since the adjustment of the forgetting factor is executed in the non-straight running state, the forgetting factor can be finely adjusted when the offset value tends to shift. Further, since fine adjustment of the forgetting factor is executed, it is possible to suppress the deterioration of the estimation accuracy of the offset value. In addition, since the deterioration of the offset value estimation accuracy is suppressed, the angular velocity estimation accuracy can be improved.
また、オフセット値を更新させるための忘却係数に応じて、仮の感度係数に対して統計処理を実行する際の忘却係数を設定するので、オフセット値のドリフトに応じて忘却係数を設定できる。また、オフセット値のドリフトに応じて忘却係数が設定されるので、短期間であっても感度係数に含まれる誤差を低減できる。また、オフセット値のドリフトに応じて忘却係数が設定されるので、感度係数の推定精度を向上できる。また、感度係数の推定精度が向上されるので、角速度の推定性を向上できる。また、オフセット値を更新させるための忘却係数が小さくなるほど、仮の感度係数に対して統計処理を実行する際の忘却係数も大きくするので、オフセット値の実際の変動に追従するような感度係数を導出できる。また、オフセット値を更新させるための忘却係数が大きくなるほど、仮の感度係数に対して統計処理を実行する際の忘却係数も小さくするので、安定性の高い感度係数を導出できる。また、角速度センサのオフセット値を更新させるための忘却係数が大きくなるほど、角速度センサの仮の感度係数のひとつを導出するための期間を短くするので、環境の変化の影響を低減できる。 In addition, since the forgetting coefficient for executing the statistical processing is set for the temporary sensitivity coefficient according to the forgetting coefficient for updating the offset value, the forgetting coefficient can be set according to the offset value drift. In addition, since the forgetting factor is set according to the drift of the offset value, the error included in the sensitivity factor can be reduced even in a short period. Moreover, since the forgetting factor is set according to the drift of the offset value, the accuracy of estimating the sensitivity factor can be improved. Moreover, since the estimation accuracy of the sensitivity coefficient is improved, the estimation property of the angular velocity can be improved. In addition, the smaller the forgetting factor for updating the offset value, the larger the forgetting factor when performing statistical processing on the temporary sensitivity factor, so a sensitivity factor that follows the actual fluctuation of the offset value is set. Can be derived. In addition, as the forgetting coefficient for updating the offset value increases, the forgetting coefficient when the statistical process is executed on the temporary sensitivity coefficient is also reduced, so that a highly stable sensitivity coefficient can be derived. Further, as the forgetting factor for updating the offset value of the angular velocity sensor increases, the period for deriving one of the temporary sensitivity coefficients of the angular velocity sensor is shortened, so that the influence of environmental changes can be reduced.
また、走行状態に応じた仮オフセット値を導出するとともに、走行状態に応じた忘却係数を使用しながら仮オフセット値をフィルタ処理することによってオフセット値を導出するので、短期間であってもオフセット値に含まれる誤差を低減できる。また、オフセット値に含まれる誤差が低減されるので、オフセット値の導出精度を向上できる。また、角速度センサのオフセット値について、車両の傾斜角度を考慮するので、導出精度をさらに向上できる。また、GPS方位のサンプリング間隔といった短い時間にて、車両の走行状態に応じた最適なオフセット値を導出するので、オフセット値のドリフトに精度よく追随できる。 In addition, the temporary offset value is derived according to the driving state, and the offset value is derived by filtering the temporary offset value while using the forgetting factor according to the driving state. Can be reduced. In addition, since the error included in the offset value is reduced, the accuracy of deriving the offset value can be improved. Moreover, since the inclination angle of the vehicle is taken into account for the offset value of the angular velocity sensor, the derivation accuracy can be further improved. Further, since the optimum offset value corresponding to the traveling state of the vehicle is derived in a short time such as the sampling interval of the GPS direction, it is possible to accurately follow the offset value drift.
また、仮の感度係数を導出するとともに、可変の忘却係数を使用しながら仮の感度係数をフィルタ処理することによって感度係数を導出するので、短期間であっても感度係数に含まれる誤差を低減できる。また、感度係数に含まれる誤差が低減されるので、感度係数の導出精度を向上できる。また、走行状態として実質的にふたつの状態を規定し、仮オフセット値の2種類の導出方法およびα1およびα2の忘却係数を用意するので、処理を簡易にできる。また、角速度センサの感度係数について、車両の傾斜角度およびその変動を考慮して算出するので、傾斜のある道路の走行時においても導出精度を向上できる。また、オフセット値のドリフトに精度よく追随できるので、ナビゲーション装置の起動直後から感度係数を正確に導出できる。また、オフセット値と感度係数との導出精度が向上されるので、角速度の導出精度を向上できる。 In addition to deriving a temporary sensitivity coefficient, the sensitivity coefficient is derived by filtering the temporary sensitivity coefficient while using a variable forgetting coefficient, thus reducing errors contained in the sensitivity coefficient even in a short period of time. it can. Further, since the error included in the sensitivity coefficient is reduced, the sensitivity coefficient derivation accuracy can be improved. Further, since two states are substantially defined as the running state and two types of provisional offset value derivation methods and forgetting factors α1 and α2 are prepared, the processing can be simplified. Further, since the sensitivity coefficient of the angular velocity sensor is calculated in consideration of the inclination angle of the vehicle and its variation, the derivation accuracy can be improved even when traveling on an inclined road. In addition, since the offset value drift can be accurately followed, the sensitivity coefficient can be accurately derived immediately after the navigation apparatus is activated. In addition, since the accuracy of deriving the offset value and the sensitivity coefficient is improved, the accuracy of deriving the angular velocity can be improved.
以上、本発明を実施例をもとに説明した。この実施例は例示であり、それらの各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。 In the above, this invention was demonstrated based on the Example. This embodiment is an exemplification, and it will be understood by those skilled in the art that various modifications can be made to the combination of each component and each processing process, and such modifications are also within the scope of the present invention. .
本発明の実施例において、オフセット値演算部28、感度係数演算部30は、式(4)、式(6)を計算する際に、GPS測位データ200に含まれたGPS方位をもとにしたΔθを使用している。しかしながらこれに限らず例えば、オフセット値演算部28、感度係数演算部30は、図示しない地図データベースを用いて、車両がマッチングしている道路方位を利用してもよい。なお、地図データベースへの車両のマッチングには、GPS測位データ200が使用される。本変形例によれば、角速度算出装置100の構成の自由度を向上できる。
In the embodiment of the present invention, the offset
本発明の実施例において、傾斜検出部24は、GPS高度を利用して車両の傾斜角度204を算出している。しかしながらこれに限らず例えば、傾斜検出部24が加速度センサを備え、加速度センサからの情報を利用して傾斜角度204を算出してもよい。または、傾斜検出部24は、図示しない地図データベースに含まれる道路情報に高度情報が存在する場合に、車両がマッチングしている道路の高度情報を利用してもよい。本変形例によれば、傾斜角度204を高精度に導出できる。
In the embodiment of the present invention, the
本発明の実施例において、オフセット値演算部28、感度係数演算部30は、仮オフセット値212、仮の感度係数を導出する際に、傾斜角度204を使用している。しかしながらこれに限らず例えば、傾斜角度204は使用されなくてもよい。その際、式(4)、式(6)でのαは0にされる。本変形例によれば、処理を簡易にできる。
In the embodiment of the present invention, the offset
本発明の実施例において、状態推定部40は、車両の走行状態判定として、GPS測位データ200に含まれたGPS速度を使用して、停止状態を判定している。しかしながらこれに限らず例えば、状態推定部40は、図示しないパルス検出部からの車両の車速パルス信号を入力し、車速パルスをもとに停止状態を判定してもよい。ここで、パルス検出部は、図示しない速度センサに接続されており、速度センサは、ドライブシャフトの回転に対応して回転するスピードメータケーブルの中間に設置され、ドライブシャフトの回転に伴った車速パルス信号を出力する。本変形例によれば、さまざまな手段によって車両の速度を測定できる。
In the embodiment of the present invention, the
本発明の実施例において、有効性判定部22は、GPS測位データ200の有効性を判定するために、PDOPを使用している。しかしながらこれに限らず例えば、有効性判定部22は、GDOP(Geometric Dilution Of Precision)、HDOP(Horizontal Dilution Of Precision)等や、これらの組合せを使用してもよい。本変形例によれば、さまざまなパラメータを判定に使用できる。
In the embodiment of the present invention, the
本発明の実施例において、オフセット値フィルタ処理部44や感度係数フィルタ部92は、IIRフィルタを含むように形成されている。しかしながらこれに限らず例えば、オフセット値フィルタ処理部44や感度係数フィルタ部92は、FIR(Finite Impulse Response)フィルタを含むように形成されていてもよい。その際、忘却係数は、タップ係数として設定される。本変形例によれば、フィルタ構成の自由度を向上できる。
In the embodiment of the present invention, the offset value
本発明の実施例において、忘却係数制御部78は、非直進走行状態が推定された場合に、忘却係数α2の調節を実行している。しかしながらこれに限らず例えば、忘却係数制御部78は、直進走行状態が推定された場合にも、忘却係数α1の調節を実行してもよい。その際、忘却係数制御部78は、非直進走行状態の場合における忘却係数α2の調節幅よりも直進走行状態の場合における忘却係数α1の調節幅を大きくする。本変形例によれば、この場合、非直進走行状態の場合における忘却係数の調節幅よりも直進走行状態の場合における忘却係数の調節幅を大きくするので、オフセット値の実際の変動に追従できる。
In the embodiment of the present invention, the forgetting
本発明の実施例において、忘却係数制御部78は、停止状態に対する忘却係数と、直進走行状態に対する忘却係数とに対して、同一の値を規定する。しかしながらこれに限らず例えば、忘却係数制御部78は、これらに対して異なった値を設定してもよい。これは、3つの状態のそれぞれに対して異なった処理がなされているといえる。本変形例によれば、走行状態として3つの状態に対して、3つの忘却係数を用意するので、各状態に適合したフィルタ処理を実現できる。
In the embodiment of the present invention, the forgetting
10 測定部、 12 パラメータ演算部、 14 角速度変換部、 20 GPS測位部、 22 有効性判定部、 24 傾斜検出部、 26 角速度センサ、 28 オフセット値演算部、 30 感度係数演算部、 32 測位データ蓄積部、 34 制御部、 40 状態推定部、 42 状態別オフセット値導出部、 44 オフセット値フィルタ処理部、 50 停止推定部、 52 直進走行推定部、 54 非直進走行推定部、 56 停止時オフセット値導出部、 58 直進走行時オフセット値導出部、 60 非直進走行時オフセット値導出部、 70 αi乗算部、 72 加算部、 74 1−αi乗算部、 76 忘却係数設定部、 78 忘却係数制御部、 80 GPS方位変化演算部、 82 自立航法方位変化演算部、 84 差分演算部、 86 差分絶対値演算部、 88 忘却係数演算部、 90 感度係数導出部、 92 感度係数フィルタ部、 94 忘却係数制御部、 100 角速度算出装置。
DESCRIPTION OF
Claims (3)
前記取得部において取得した角速度を少なくとも使用することによって、前記角速度センサのオフセット値を更新させながら順次導出するオフセット値導出部と、
前記取得部において取得した測位データと角速度とをもとに、前記角速度センサの仮の感度係数を逐次導出する感度係数導出部と、
前記感度係数導出部において逐次導出した前記角速度センサの仮の感度係数に対して統計処理を実行することによって、前記オフセット値導出部において導出した前記角速度センサのオフセット値とともに、前記角速度センサから出力された角速度を補正するための前記角速度センサの感度係数を導出する感度係数フィルタ処理部とを備え、
前記感度係数フィルタ処理部は、前記オフセット値導出部において前記角速度センサのオフセット値を更新させる程度に応じて、統計処理の際の忘却係数を変更することを特徴とする角速度センサ補正装置。 An acquisition unit that acquires positioning data of an object measured based on a signal from a GPS satellite and an angular velocity of the object output from an angular velocity sensor;
An offset value deriving unit that sequentially derives the offset value of the angular velocity sensor while updating the offset value by using at least the angular velocity obtained in the obtaining unit;
A sensitivity coefficient deriving unit for sequentially deriving a temporary sensitivity coefficient of the angular velocity sensor based on the positioning data and the angular velocity acquired in the acquisition unit;
By performing statistical processing on the temporary sensitivity coefficient of the angular velocity sensor sequentially derived by the sensitivity coefficient deriving unit, the statistical value is output from the angular velocity sensor together with the offset value of the angular velocity sensor derived by the offset value deriving unit. A sensitivity coefficient filter processing unit for deriving a sensitivity coefficient of the angular velocity sensor for correcting the angular velocity.
The angular velocity sensor correction device, wherein the sensitivity coefficient filter processing unit changes a forgetting factor at the time of statistical processing according to a degree to which the offset value of the angular velocity sensor is updated in the offset value deriving unit.
取得した角速度を少なくとも使用することによって、前記角速度センサのオフセット値を更新させながら順次導出するステップと、
取得した測位データと角速度とをもとに、前記角速度センサの仮の感度係数を逐次導出するステップと、
逐次導出した前記角速度センサの仮の感度係数に対して統計処理を実行することによって、導出した前記角速度センサのオフセット値とともに、前記角速度センサから出力された角速度を補正するための前記角速度センサの感度係数を導出するステップとを備え、
前記角速度センサの感度係数を導出するステップは、前記角速度センサのオフセット値を更新させながら順次導出するステップにおいて前記角速度センサのオフセット値を更新させる程度に応じて、統計処理の際の忘却係数を変更することを特徴とする角速度センサ補正方法。 Obtaining positioning data of an object measured based on a signal from a GPS satellite and an angular velocity of the object output from an angular velocity sensor;
Deriving sequentially while updating the offset value of the angular velocity sensor by using at least the acquired angular velocity; and
Based on the obtained positioning data and angular velocity, sequentially deriving a temporary sensitivity coefficient of the angular velocity sensor;
The sensitivity of the angular velocity sensor for correcting the angular velocity output from the angular velocity sensor together with the offset value of the derived angular velocity sensor by performing statistical processing on the temporary sensitivity coefficient of the angular velocity sensor derived sequentially. Deriving coefficients,
The step of deriving the sensitivity coefficient of the angular velocity sensor changes the forgetting factor in the statistical processing according to the degree to which the offset value of the angular velocity sensor is updated in the step of deriving sequentially while updating the offset value of the angular velocity sensor. An angular velocity sensor correction method comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010249460A JP5273127B2 (en) | 2010-11-08 | 2010-11-08 | Angular velocity sensor correction apparatus and angular velocity sensor correction method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010249460A JP5273127B2 (en) | 2010-11-08 | 2010-11-08 | Angular velocity sensor correction apparatus and angular velocity sensor correction method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012103024A true JP2012103024A (en) | 2012-05-31 |
| JP5273127B2 JP5273127B2 (en) | 2013-08-28 |
Family
ID=46393617
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010249460A Active JP5273127B2 (en) | 2010-11-08 | 2010-11-08 | Angular velocity sensor correction apparatus and angular velocity sensor correction method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5273127B2 (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014185444A1 (en) * | 2013-05-14 | 2014-11-20 | 独立行政法人産業技術総合研究所 | Estimated-azimuth-angle assessment device, mobile terminal device, control program for estimated-azimuth-angle assessment device, computer-readable storage medium, control method for estimated-azimuth-angle assessment device, and positioning device |
| JP2016114515A (en) * | 2014-12-16 | 2016-06-23 | 株式会社Jvcケンウッド | Azimuth estimation device and azimuth estimation method |
| JP2016114514A (en) * | 2014-12-16 | 2016-06-23 | 株式会社Jvcケンウッド | Angular velocity sensor correction device and angular velocity sensor correction method |
| WO2016098703A1 (en) * | 2014-12-16 | 2016-06-23 | 株式会社Jvcケンウッド | Angular velocity sensor correction device, angular velocity sensor correction method, azimuth estimation device and azimuth estimation method |
| JP2016114513A (en) * | 2014-12-16 | 2016-06-23 | 株式会社Jvcケンウッド | Angular velocity sensor correction device and angular velocity sensor correction method |
| JP2016224320A (en) * | 2015-06-02 | 2016-12-28 | 沖電気工業株式会社 | Information processor and information processing method |
| JPWO2018198972A1 (en) * | 2017-04-27 | 2019-06-27 | 住友化学株式会社 | Composition and light emitting device using the same |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05172575A (en) * | 1991-12-19 | 1993-07-09 | Pioneer Electron Corp | Navigation equipment |
| JPH0755480A (en) * | 1993-06-04 | 1995-03-03 | Koden Electron Co Ltd | Navigation apparatus |
| JPH08327377A (en) * | 1995-05-31 | 1996-12-13 | Sony Corp | Navigation device |
| JPH09152338A (en) * | 1995-12-01 | 1997-06-10 | Fujitsu Ten Ltd | Gyro apparatus |
| JP2001330454A (en) * | 2000-05-22 | 2001-11-30 | Sony Corp | Apparatus for correcting angular velocity sensor, automobile navigation system, method for calculating angular velocity, and storage medium |
| JP2010078567A (en) * | 2008-09-29 | 2010-04-08 | Victor Co Of Japan Ltd | Apparatus and method for correcting angular velocity sensor |
| JP2010101810A (en) * | 2008-10-24 | 2010-05-06 | Victor Co Of Japan Ltd | Angular velocity sensor correction device, angular velocity calculation device, angular velocity sensor correction method, and angular velocity calculation method |
| JP2010247303A (en) * | 2009-04-20 | 2010-11-04 | Seiko Epson Corp | Detecting method for angular velocity or angle, and control method for robot |
| JP2011112500A (en) * | 2009-11-26 | 2011-06-09 | Fujitsu Ltd | Sensor correction program, sensor correction device, and sensor correction method |
-
2010
- 2010-11-08 JP JP2010249460A patent/JP5273127B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05172575A (en) * | 1991-12-19 | 1993-07-09 | Pioneer Electron Corp | Navigation equipment |
| JPH0755480A (en) * | 1993-06-04 | 1995-03-03 | Koden Electron Co Ltd | Navigation apparatus |
| JPH08327377A (en) * | 1995-05-31 | 1996-12-13 | Sony Corp | Navigation device |
| JPH09152338A (en) * | 1995-12-01 | 1997-06-10 | Fujitsu Ten Ltd | Gyro apparatus |
| JP2001330454A (en) * | 2000-05-22 | 2001-11-30 | Sony Corp | Apparatus for correcting angular velocity sensor, automobile navigation system, method for calculating angular velocity, and storage medium |
| JP2010078567A (en) * | 2008-09-29 | 2010-04-08 | Victor Co Of Japan Ltd | Apparatus and method for correcting angular velocity sensor |
| JP2010101810A (en) * | 2008-10-24 | 2010-05-06 | Victor Co Of Japan Ltd | Angular velocity sensor correction device, angular velocity calculation device, angular velocity sensor correction method, and angular velocity calculation method |
| JP2010247303A (en) * | 2009-04-20 | 2010-11-04 | Seiko Epson Corp | Detecting method for angular velocity or angle, and control method for robot |
| JP2011112500A (en) * | 2009-11-26 | 2011-06-09 | Fujitsu Ltd | Sensor correction program, sensor correction device, and sensor correction method |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014185444A1 (en) * | 2013-05-14 | 2014-11-20 | 独立行政法人産業技術総合研究所 | Estimated-azimuth-angle assessment device, mobile terminal device, control program for estimated-azimuth-angle assessment device, computer-readable storage medium, control method for estimated-azimuth-angle assessment device, and positioning device |
| JP6044971B2 (en) * | 2013-05-14 | 2016-12-14 | 国立研究開発法人産業技術総合研究所 | Estimated azimuth angle evaluation apparatus, mobile terminal apparatus, estimated azimuth angle evaluation apparatus control program, computer-readable recording medium, estimated azimuth angle evaluation apparatus control method, and positioning apparatus |
| US10527424B2 (en) | 2013-05-14 | 2020-01-07 | National Institute Of Advanced Industrial Science And Technology | Estimated-azimuth-angle assessment device, mobile terminal device, computer-readable storage medium, control method for estimated-azimuth-angle assessment device, and positioning device |
| JP2016114515A (en) * | 2014-12-16 | 2016-06-23 | 株式会社Jvcケンウッド | Azimuth estimation device and azimuth estimation method |
| JP2016114514A (en) * | 2014-12-16 | 2016-06-23 | 株式会社Jvcケンウッド | Angular velocity sensor correction device and angular velocity sensor correction method |
| WO2016098703A1 (en) * | 2014-12-16 | 2016-06-23 | 株式会社Jvcケンウッド | Angular velocity sensor correction device, angular velocity sensor correction method, azimuth estimation device and azimuth estimation method |
| JP2016114513A (en) * | 2014-12-16 | 2016-06-23 | 株式会社Jvcケンウッド | Angular velocity sensor correction device and angular velocity sensor correction method |
| JP2016224320A (en) * | 2015-06-02 | 2016-12-28 | 沖電気工業株式会社 | Information processor and information processing method |
| JPWO2018198972A1 (en) * | 2017-04-27 | 2019-06-27 | 住友化学株式会社 | Composition and light emitting device using the same |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5273127B2 (en) | 2013-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4780174B2 (en) | Angular velocity sensor correction device, angular velocity calculation device, angular velocity sensor correction method, angular velocity calculation method | |
| JP4780168B2 (en) | Angular velocity sensor correction apparatus and angular velocity sensor correction method | |
| JP4952518B2 (en) | Vehicle current position detection device and program | |
| JP5273127B2 (en) | Angular velocity sensor correction apparatus and angular velocity sensor correction method | |
| JP5074950B2 (en) | Navigation equipment | |
| JPH0518774A (en) | Vehicle position-azimuth computing device | |
| CN111536972B (en) | Vehicle-mounted DR navigation method based on odometer scale factor correction | |
| JP5365606B2 (en) | Angular velocity sensor correction apparatus and angular velocity sensor correction method | |
| WO2016098703A1 (en) | Angular velocity sensor correction device, angular velocity sensor correction method, azimuth estimation device and azimuth estimation method | |
| JP6248559B2 (en) | Vehicle trajectory calculation device | |
| JP6555033B2 (en) | Angular velocity sensor correction apparatus and angular velocity sensor correction method | |
| JP6287804B2 (en) | Direction estimation apparatus and direction estimation method | |
| JP6699355B2 (en) | Angular velocity sensor correction device and angular velocity sensor correction method | |
| JP6372339B2 (en) | Angular velocity sensor correction apparatus and angular velocity sensor correction method | |
| JP6369320B2 (en) | Angular velocity sensor correction apparatus and angular velocity sensor correction method | |
| JP6673106B2 (en) | Angular velocity sensor correction device and angular velocity sensor correction method | |
| JP5569276B2 (en) | Current position detection device for vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120724 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130416 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130417 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130429 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5273127 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |