CN109270066B - 一种线阵相机扫描方法和装置 - Google Patents
一种线阵相机扫描方法和装置 Download PDFInfo
- Publication number
- CN109270066B CN109270066B CN201811137914.7A CN201811137914A CN109270066B CN 109270066 B CN109270066 B CN 109270066B CN 201811137914 A CN201811137914 A CN 201811137914A CN 109270066 B CN109270066 B CN 109270066B
- Authority
- CN
- China
- Prior art keywords
- scanning
- linear array
- shooting
- mark
- mark point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/01—Arrangements or apparatus for facilitating the optical investigation
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Studio Devices (AREA)
- Automatic Focus Adjustment (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
本发明公开了一种线阵相机扫描方法,其用于线阵相机扫描系统,包括步骤:获取目标物图像;在目标物图像上选取多个标记点;按照第一顺序对所述多个标记点依次进行高精度对焦,以确定各个标记点的焦点位置;根据各个标记点的焦点位置利用线阵相机对目标物进行扫描。克服了现有技术中存在的以单条扫描线的清晰度作为最佳焦距的选择依据,从而导致容易出现焦点附近区域图像不清晰的现象,还通过线阵相机的拍摄触发信号由载具的移动触发产生,这样能在载具移动停止后,发送拍摄触发信号,避免线阵相机在载具移动时进行拍照,造成的图像失真或者错位现象,提高线阵相机对焦准确度,从而提高扫描精确度。
Description
技术领域
本发明涉及病理切片扫描成像技术领域,特别涉及一种线阵相机扫描方法及装置。
背景技术
线阵扫描相机高速采集,每次采集完一条线后正好运动到下一个单位长度,继续下一条线的采集,这样一段时间下来就拼成了一张二维的图片,也就类似于面阵相机采集到的图片。线阵相机扫描系统工作过程中,由于目标物体表面的凹凸不平,放目标物(被拍摄物/被扫描物)的载具也有倾斜,会导致目标物整体的焦点可能会有很大的变化,故扫描目标物体前,一般需要在待扫描区域选取多个标记点进行对焦。
现有技术中,线阵相机扫描系统对多个标记点对焦和扫描方法存在准确度低、扫描效率低的问题。
发明内容
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的是提供一种准确度更高、扫描效率更快的线阵相机扫描方法和装置。
本发明所采用的技术方案是:
一种线阵相机扫描方法,其用于线阵相机扫描系统,所述线阵相机扫描系统包括用于拍摄目标物的面阵相机和线阵拍摄部件和用于放置目标物的载具,所述线阵拍摄部件包括线阵相机和物镜,包括步骤:
获取目标物图像;
在目标物图像上选取多个标记点;
按照第一顺序对所述多个标记点依次进行高精度对焦,以确定各个标记点的焦点位置;
根据各个标记点的焦点位置利用线阵相机对目标物进行扫描。
进一步地,所述在目标物图像上选取多个标记点,具体包括:
获取目标物图像的图像边缘和色彩信息;
根据所述图像边缘、所述色彩信息选取标记点;
根据标记点疏密程度,删除或增加标记点;
所述色彩信息包括灰色深浅度,所述获取图像边缘和色彩信息具体包括:
通过图像边缘提取算法提取目标物图像的图像边缘;
通过对目标物图像灰度化处理得到灰度图,提取灰度图的灰度值,得到灰色深浅度;
所述标记点包括边缘标记点和中央标记点,所述根据所述图像边缘、所述色彩信息选取标记点具体包括:
根据图像边缘,按照第一选取规则在所述图像边缘上选取若干个边缘标记点;
根据灰色深浅度,按照第二选取规则在图像中央区域选取若干个中央标记点;
所述第一选取规则为选取的相邻两个标记点之间的间隔距离为固定值;所述第二选取规则为预设灰度值阈值,当像素点灰度值大于灰度值阈值时,选取为标记点;
所述根据标记点疏密程度,删除或增加标记点具体包括:
预设相邻标记点间的间隔距离低阈值和间隔距离高阈值,判断各标记点与其相邻标记点间的间隔距离是否大于间隔距离低阈值并且小于间隔距离高阈值;
若标记点与其相邻标记点间的间隔距离大于间隔距离低阈值并且小于间隔距离高阈值,则保留该标记点;
若标记点与其相邻标记点间的间隔距离小于间隔距离低阈值,则删除该标记点;
若标记点与其相邻标记点间的间隔距离高于间隔距离高阈值,则在该标记点与其相邻标记点间增加标记点。
进一步地,所述高精度对焦具体包括全对焦过程或半对焦过程:
所述全对焦过程包括粗对焦过程和精对焦过程;
所述半对焦过程具体为:以前一个标记点的焦点位置为第二中心位置,执行精对焦过程;
所述粗对焦过程具体为:
利用线阵拍摄部件在多个拍摄高度位置拍摄目标物;
在每个拍摄高度位置,控制载具沿着横向方向移动,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,以组成该拍摄高度位置的参考图像,所述横向方向为垂直于所述线阵相机扫描线的方向;
根据不同高度位置的参考图像的清晰度,确定第一焦点对应的高度位置;
所述多个拍摄高度位置为位于预设第一起始高度位置和第一终止高度位置之间,所述物镜按照第一预设步进距离沿竖向轴线从第一起始高度位置移动到第一终止高度位置,形成多个拍摄高度位置;
所述第一起始高度位置对应的焦点位置高于目标物的上表面,所述第一终止高度位置对应的焦点位置低于目标物下表面;
所述精对焦过程具体为:
选取第一焦点对应的高度位置作为第二中心位置,并且以第二中心位置为中心获取第二起始高度位置和第二终止高度位置;
所述物镜按照第二预设步进距离沿竖向轴线从第二起始高度位置移动到第二终止高度位置,形成多个二次拍摄高度位置;
利用线阵拍摄部件在多个二次拍摄高度位置拍摄目标物;
在每个二次拍摄高度位置,控制载具沿着横向方向移动,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,以组成该拍摄高度位置的参考图像,所述横向方向为垂直于所述线阵相机扫描线的方向;
根据不同高度位置的参考图像的清晰度,确定第二焦点对应的高度位置。
进一步地,所述在每个拍摄高度位置,载具沿着横向方向移动,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像以组成该拍摄高度位置的参考图像,包括两种实施方式:
第一实施方式具体包括:
所述物镜移动到当前拍摄高度位置后,载具沿着横向方向从第一横向位置移动到第二横向位置,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像;然后所述物镜移动到下一拍摄高度位置,载具从第二横向位置移动到第一横向位置,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像;
第二实施方式具体包括:
所述物镜移动到当前拍摄高度位置后,载具沿着横向方向从第一横向位置移动到第二横向位置,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,载具从第二横向位置移动回到第一横向位置;然后所述物镜移动到下一拍摄高度位置,载具沿着横向方向从第一横向位置移动到第二横向位置,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像。
进一步地,所述线阵相机扫描系统还包括与所述线阵相机连接的控制器和Y轴电机,所述载具在所述Y轴电机的驱动下沿Y轴运动,利用载具横向移动电机产生拍照触发信号;
预先提供帧触发信号到线阵相机;
到达预设起始位置时,输出行触发信号驱动线阵相机拍摄;
所述起始位置设置在所述帧触发信号开始之后;
所述预先提供帧触发信号到线阵相机具体包括:控制器预先提供帧触发信号到线阵相机,线阵相机进入预拍摄状态;
所述行触发信号为方波信号,所述行触发信号每一个上升沿或下降沿触发所述线阵相机拍摄一次,当所述线阵相机的拍摄次数达到预设值时,所述线阵相机停止拍摄。
进一步地,所述第一顺序指:
确定第一标记点,作为全对焦标记点,进行全对焦过程;
根据第一约束条件选择下一个标记点,作为半对焦标记点,进行半对焦过程;
将满足第二约束条件的标记点重新作为全对焦标记点进行对焦;
所述第一约束条件包括:
C0,与上一个标记点距离小于预设距离阈值;
C1,与上一个标记点距离最小;
C2,与上一个标记点位于同一个连通区域内;
所述第二约束条件为:与上一个标记点距离大于预设距离的标记点或利用半对焦过程获得的多个参考图像清晰度均小于预设清晰度的标记点。
进一步地,扫描采用列扫描方式,按照预设的扫描宽度进行扫描,每个扫描列中图像均包含至少一个标记点。
进一步地,还包括步骤,扫描完成后,将扫描获取的条状扫描区域图像进行拼接和融合。
进一步地,还包括步骤,扫描开始前,对所述目标物图像进行空白区域检测,当检测到空白区域的宽度大于预设空白宽度时,扫描时跳过所述空白区域。
另一方面,本发明还提供一种线阵相机扫描装置,包括:
目标图像获取模块,用于获取目标物图像;
标记点获取模块,用于在目标物图像上选取多个标记点;
对焦模块,用于按照第一顺序对所述多个标记点依次进行高精度对焦,以确定各个标记点的焦点位置;
扫描模块,用于根据各个标记点的焦点位置对目标物进行扫描。
本发明的有益效果是:
本发明通过线阵相机的物镜与载具共同移动,在不同的拍摄高度位置获取对焦标记点附近小区域参考图像,克服了现有技术中存在的以单条扫描线的清晰度作为最佳焦距的选择依据,从而导致容易出现焦点附近区域图像不清晰的现象,还通过预先提供帧触发信号到线阵相机;到达预设起始位置时,输出行触发信号驱动线阵相机拍摄,解决现有技术中线阵相机拍摄出来的图像拉伸或者图像失真的问题,改善图像拍摄效果。
另外本发明还通过采用在目标物图像上选取多个标记点,对一些标记点进行包括粗对焦过程和精对焦过程的全对焦过程,以获取对应标记点的焦点位置,对另一些标记点进行以前一个标记点的焦点位置为第二中心位置,执行精对焦过程的半对焦过程,克服了现有技术中存在的多个对焦标记点进行对焦时需要逐一全对焦导致的对焦效率低的缺陷。
本发明可广泛应用于各种线阵相机扫描系统。
附图说明
图1是本发明一种实施方式的线阵相机扫描方法流程图;
图2是本发明一种实施方式的线阵相机扫描方法中选取标记点的示意图;
图3是本发明一种实施方式的线阵相机扫描方法的高精度对焦过程示意图;
图4是本发明一种实施方式的线阵相机扫描方法的高精度对焦过程中载具移动示意图;
图5是本发明一种实施方式的线阵相机扫描方法的高精度对焦过程中扫描区域示意图;
图6是本发明一种实施方式的线阵相机扫描方法的高精度对焦过程的精对焦时焦点位置选择示意图;
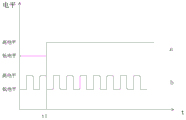
图7是现有技术中线阵相机扫描方法中触发信号时序波形图;
图8是现有技术中线阵相机扫描过程中帧触发信号、行触发信号和Y轴驱动信号的时序波形图;
图9是本发明一种实施方式的线阵相机扫描方法中触发时序同步流程示意图;
图10是本发明一种实施方式的线阵相机扫描方法中触发时序同步过程中帧触发信号、位置信号和行触发信号的时序波形图;
图11是本发明一种实施方式的线阵相机扫描方法的对焦过程的第一顺序选取标记点流程图;
图12是本发明一种实施方式的线阵相机扫描方法的高精度对焦过程的标记点选取示意图;
图13是本发明一种实施方式的线阵相机扫描方法的列扫描示意图;
图14是本发明一种实施方式的线阵相机扫描方法的扫描示意图;
图15是本发明一种实施方式的线阵相机扫描方法的物镜焦距轨迹示意图;
图16是本发明一种实施方式的一种线阵相机扫描装置结构框图。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
本发明用于线阵相机扫描系统,包括用于拍摄目标物的面阵相机和线阵拍摄部件和用于放置目标物的载具和Y轴电机驱动器,载具在Y轴电机驱动器的驱动下沿Y轴运动,线阵拍摄部件包括线阵相机和物镜。
如图1所示,为本发明一种实施方式的线阵相机扫描方法流程图,其中包括步骤:S1:获取目标物图像;S2:在目标物图像上选取多个标记点;S3:按照第一顺序对所述多个标记点依次进行高精度对焦,以确定各个标记点的焦点位置;S4:根据各个标记点的焦点位置对目标物进行扫描。
在某一个实施例中,获取目标物图像采用一个面阵相机,对目标物进行拍照,获取其图像作为选取标记点的参考图像。
如图2所示,为本发明一种实施方式的线阵相机扫描方法中选取标记点的示意图,图中示出了标记点一2041、标记点二2042、标记点三2043、标记点四2044和标记点五2045。
在目标物图像上选取多个标记点的标记点选取具体包括:
1)获取目标物图像的图像边缘和色彩信息,色彩信息包括灰色深浅度,获取图像边缘和色彩信息具体包括:通过图像边缘提取算法提取目标物图像的图像边缘,通过对目标物图像灰度化处理得到灰度图,提取灰度图的灰度值,得到灰色深浅度。
2)根据所述图像边缘、所述色彩信息选取标记点,标记点包括边缘标记点和中央标记点,根据图像边缘、色彩信息选取标记点具体包括:
根据图像边缘,按照第一选取规则在所述图像边缘上选取若干个边缘标记点;
根据灰色深浅度,按照第二选取规则在图像中央区域选取若干个中央标记点;
第一选取规则为选取的相邻两个标记点之间的间隔距离为固定值;所述第二选取规则为预设灰度值阈值,当像素点灰度值大于灰度值阈值时,选取为标记点;
3)根据标记点疏密程度,删除或增加标记点,具体包括:
预设相邻标记点间的间隔距离低阈值和间隔距离高阈值,判断各标记点与其相邻标记点间的间隔距离是否大于间隔距离低阈值并且小于间隔距离高阈值;
若标记点与其相邻标记点间的间隔距离大于间隔距离低阈值并且小于间隔距离高阈值,则保留该标记点;
若标记点与其相邻标记点间的间隔距离小于间隔距离低阈值,则删除该标记点;
若标记点与其相邻标记点间的间隔距离高于间隔距离高阈值,则在该标记点与其相邻标记点间增加标记点。
本实施例中,对目标物图像灰度化处理得到灰度图,提取灰度图的灰度值,得到灰色深浅度,灰度化处理具体包括加权平均法,对R、G、B三个分量以不同的权值进行加权平均,得到灰度图;或者采用平均值法,求出每个像素点的R、G、B三个分量的平均值,然后将原始彩色图像中的平均值赋予这三个像素的分量;或者采用最大值法,将原始彩色图像中的R、G、B三个分量亮度的最大值作为灰度图的灰度值。
按照第一选取规则,在图像边缘上选取若干个边缘标记点,任意两个相邻的边缘标记点之间的间隔距离为固定值d。按照第二选取规则,在图像中央区域选取若干个中央标记点,假设灰度图的灰度值范围为0-255,预设灰度值阈值为133,则当该图像中央区域像素点灰度值大于133时,选取为标记点。
如图2中所示,测量区域边缘和内部均分布有标记点,根据标记点获取的方法,通过图像边缘提取算法提取图像的图像边缘,根据图像边缘,按照第一选取规则在所述图像边缘上选取若干个边缘标记点,其中第一选取规则为选取的相邻两个标记点之间的间隔距离为固定值,因此标记点一2041、标记点二2042为图像边缘标记点,通过对图像灰度化处理得到灰度图,提取灰度图的灰度值,得到灰色深浅度,根据灰色深浅度,按照第二选取规则在图像中央区域选取若干个中央标记点,第二选取规则为预设灰度值阈值,当像素点灰度值大于灰度值阈值时,选取为标记点,标记点三2043、标记点四2044和标记点五2045位于图像内部,根据灰度深浅度标记出来。
预设相邻标记点间的间隔距离范围为(a,b),判断各标记点与相邻标记点间的间隔距离是否在间隔距离范围(a,b)内,若是,则保留该标记点,若标记点与其一相邻标记点间的间隔距离小于a,则删除该标记点,若标记点与其一相邻标记点间的间隔距离大于b,则在该标记点与其这相邻标记点之间增加标记点。
因此图2中示出的标记点三2043和标记点四2044应该被删除。
通过获取目标物图像的图像边缘和色彩信息,根据图像边缘、色彩信息选取标记点,并根据标记点疏密程度,删除或增加标记点,与现有技术中随机选取标记点或简单数学运算选取标记点相比,对图像焦距标记点的选择更加合理,避免后续的线阵相机扫描图像不清晰的问题。
本实施例中高精度对焦方法包括两次对焦步骤:全对焦过程和半对焦过程。
全对焦过程包括粗对焦过程和精对焦过程,半对焦过程具体为:以前一个标记点的焦点位置为第二中心位置,执行精对焦过程。
其中粗对焦过程如下:
包括步骤:1)利用线阵拍摄部件在多个拍摄高度位置(一次拍摄高度位置)拍摄目标物;2)根据不同高度位置的参考图像的清晰度,确定第一焦点对应的高度位置。
其中利用线阵拍摄部件在多个拍摄高度位置拍摄目标物指在每个拍摄高度位置,控制载具沿着横向方向(Y轴方向)移动,线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,以组成该拍摄高度位置的参考图像,横向方向为垂直于线阵相机扫描线的方向;
多个拍摄高度位置为位于预设第一起始高度位置和第一终止高度位置之间,物镜按照第一预设步进距离沿竖向轴线从第一起始高度位置移动到第一终止高度位置,形成多个拍摄高度位置。本实施例中,采用物镜独立于线阵相机移动(即线阵相机不动,物镜沿Z轴方向移动)实现线阵拍摄部件的调焦动作,使得线阵拍摄部件操作简单。
第一起始高度位置对应的焦点位置高于目标物的上表面,第一终止高度位置对应的焦点位置低于目标物下表面,这样设置对焦位置,确保在对焦过程中,所获得的图像清晰度呈现非单调性,能够保证线阵相机获取的图像从模糊到清晰再到模糊的过程,也就是覆盖能够拍摄到最清楚的对焦位置。
精对焦过程如下:
选取第一焦点对应的高度位置作为第二中心位置,并且以第二中心位置为中心获取第二起始高度位置和第二终止高度位置;物镜按照第二预设步进距离沿竖向轴线从第二起始高度位置移动到第二终止高度位置,形成多个二次拍摄高度位置;利用线阵拍摄部件在多个二次拍摄高度位置拍摄目标物,在每个二次拍摄高度位置,控制载具沿着横向方向移动,线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,以组成该拍摄高度位置的参考图像,横向方向为垂直于所述线阵相机扫描线的方向;根据不同高度位置的参考图像的清晰度,确定第二焦点对应的高度位置。
其中焦点确定方法为:1)选择清晰度最高的参考图像对应的拍摄高度位置作为焦点位置,2)通过不同高度位置参考图像清晰度拟合一条清晰度曲线,选择清晰度最高的位置对应的Z轴上的位置作为焦点位置。
如图3所示,为本发明一种实施方式的线阵相机扫描方法的高精度对焦过程示意图,包括线阵相机102、物镜101、物镜轴线103、第一起始高度位置104、第一终止高度位置105、物镜移动方向(Z轴方向)106、载具201、目标物203、对焦标记点204和载具移动方向(Y轴方向)205。
首先利用面阵相机采集目标物图像,并在采集的目标物图像上设置对焦标记点204。
目标物203为装载有病理切片的载玻片,放置在载具201上,避免和物镜101相接触,以免污染物镜101,对焦时,载具201沿着载具移动方向(Y轴方向)205移动。
线阵相机102与物镜101相连,对焦时,线阵相机102固定,物镜101沿着物镜移动方向(Z轴方向)106移动,物镜101的对焦位置以第一预设步进距离从第一起始高度位置104对应的焦点位置到第一终止高度位置105对应的焦点位置,第一起始高度位置104对应的焦点位置高于目标物的上表面,第一终止高度位置105对应的焦点位置低于目标物下表面,该范围覆盖拍摄最清楚的对焦位置,实际使用中,第一起始高度位置104和第一终止高度位置105在调试过程中确定,为工程预设值。
如图4所示,为本发明一种实施方式的线阵相机扫描方法的高精度对焦过程中载具移动示意图,其中包括线阵相机102、物镜101、物镜轴线103、物镜移动方向(Z轴方向)106、目标物203、对焦标记点204、载具移动方向(Y轴方向)205、第一横向位置301、第二横向位置302、线阵相机扫描线方向303、线阵相机扫描线区域宽度304和对焦标记点移动轨迹305。
线阵相机扫描线区域宽度304为第一横向位置301到第二横向位置302的距离,对焦时,放置目标物203的载具沿着载具移动方向(Y轴方向)205以预设距离移动,载具移动方向(Y轴方向)205垂直于线阵相机扫描线方向303,目标物203处于第一横向位置301指:对焦标记点204的中心位于第一横向位置301上,目标物203处于第二横向位置302指:对焦标记点204的中心位于第一横向位置302上。
移动过程中对焦标记点204的中心在第一横向位置301和第二横向位置302之间移动,其移动轨迹与物镜轴线103垂直相交。
在每个拍摄高度位置,载具沿着横向方向移动,线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像以组成该拍摄高度位置的参考图像,包括两种实施方式:
本发明一个实施例中第一实施方式指:
物镜101沿着物镜移动方向(Z轴方向)106移动一个步进到当前拍摄高度位置后,载具带动目标物203以预设距离从第一横向位置301有效移动到第二横向位置302,线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像;然后物镜101继续沿着物镜移动方向(Z轴方向)106移动一个步进移动到下一拍摄高度位置,载具带动目标物203从第二横向位置302移动到第一横向位置301,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像;
即第一实施方式指载具带动目标物203在第一横向位置301和第二横向位置302之间往返移动,移动过程中,利用载具横向移动电机产生拍照触发信号线阵相机。
本发明另一个实施例中第二实施方式指:
物镜101沿着物镜移动方向(Z轴方向)106移动一个步进到当前拍摄高度位置后,载具带动目标物203以预设距离从第一横向位置301有效移动到第二横向位置302,线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,载具带动目标物203从第二横向位置302移动回到第一横向位置301;然后物镜101继续沿着物镜移动方向(Z轴方向)106移动一个步进移动到下一拍摄高度位置,载具带动目标物203从第一横向位置301移动到第二横向位置302,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像;
即第二实施方式指载具带动目标物203只有从在第一横向位置301移动到第二横向位置302的过程中,利用载具横向移动电机产生拍照触发信号至线阵相机。
如图5所示,为本发明一种实施方式的线阵相机扫描方法的高精度对焦过程中扫描区域示意图,包括第一横向位置301、第二横向位置302、线阵相机扫描线方向303、线阵相机扫描线区域宽度304、扫描线310、目标物203和载具移动方向(Y轴方向)205。
线阵相机的扫描范围如图6所示,在沿着载具移动方向为第一横向位置301到第二横向位置302的距离,在沿着扫描线方向为扫描线方向长度,本发明的线阵相机对焦方法扫描获取的是一个区域图像。
物镜每移动一次,目标物203沿着垂直于所述线阵相机扫描线方向303以预设距离移动。
在某一个实施例中,线阵相机扫描线区域宽度304为16um(即在每个拍摄高度位置,载具沿Y轴方向移动的距离),线阵相机扫描线方向长度为2000pixel(即沿着线阵相机扫描线方向303),目标物203在第一横向位置(X,Y1)301和第二横向位置(X,Y2)302之间移动的预设距离为0.25um或者0.5um。
当预设距离为0.25um时,表示物镜每移动一次,目标物203在第一横向位置301和第二横向位置302之间移动时,发送64次拍照触发信号,即有64条扫描线构成一幅拍摄图像,根据2000pixel*0.25um=500um,64*0.25um=16um,线阵拍摄部件的扫描区域为500um*16um或2000pixel*64pixel。
当预设距离为0.5um时,表示物镜每移动一次,目标物203在第一横向位置301和第二横向位置302之间移动时,发送32次拍照触发信号,即有32条扫描线构成一幅拍摄图像,根据2000pixel*0.5um=1000um,32*0.5um=16um,线阵拍摄部件的扫描区域为1000um*16um或2000pixel*32pixel。
预设距离的选取与线阵相机参数有关。
物镜按照第一预设步进距离沿竖向轴线从第一起始高度位置移动到第一终止高度位置,线阵相机获取多张照片,根据不同高度位置的图像的清晰度,确定第一焦点对应的高度位置。
其中焦点确定方法为:1)选择清晰度最高的参考图像对应的拍摄高度位置作为焦点位置,2)通过不同高度位置参考图像清晰度拟合一条清晰度曲线,选择清晰度最高的位置对应的Z轴上的位置作为焦点位置。
如图6所示,为本发明一种实施方式的线阵相机扫描方法的高精度对焦过程的精对焦时焦点位置选择示意图,包括物镜轴线103、第一起始高度位置104、第一终止高度位置105、物镜移动方向(Z轴方向)106、第一预设步进距离309、第一焦点对应的高度位置401、第二预设步进距离306、第二起始高度位置307、第二终止位置308和第二焦点对应的高度位置402。
该实施例中,焦点确定方式为选择清晰度最高的参考图像对应的拍摄高度位置作为焦点位置,假设设置第一预设步进距离309是指:在第一起始高度位置104和第一终止高度位置105之间物镜以第一预设步进距离309(如间隔取值范围可设置为20um至40um)移动10次,设置第二预设步进306是指在第二起始高度位置307和第二终止位置308之间物镜以第二预设步进距离306(如间隔取值范围可设置为8um至10um)移动12次,其中第一焦点对应的高度位置401指:在第一起始高度位置104和第一终止高度位置105之间物镜拍摄的图像中清晰度最高的图像的拍摄焦点对应的高度位置,即第二中心位置,第二起始高度位置307和第二终止位置308是以第一焦点对应的高度位置401为中心,在其上下各设置6次移动间隔,并且第二预设步进距离306小于第一预设步进距离309,最后在第二起始高度位置307和第二终止位置308线阵相机拍摄获取的图像中选择清晰度最高的图像所在的焦点对应的高度位置定义为第二焦点对应的高度位置402。
在精对焦过程时,载具移动方式和拍摄信号触发方式与获取第一焦点对应的高度位置时相同。
这种方法思路是先通过物镜大的移动间隔,获取最接近的焦点位置,然后再以该焦点位置为基础,在其上下范围内设置小间隔,获取更加准确的焦点位置,通过精对焦的方式增加了对焦准确度。
图7是现有技术中线阵相机扫描方法中触发信号时序波形图;
图8是现有技术中线阵相机扫描过程中帧触发信号、行触发信号和Y轴驱动信号的时序波形图;
如图7所示,在帧触发信号a为高电平时,每个行脉冲触发信号b拍摄一次。
现有技术中,被检测的物体通常是跟随载具在Y轴方向运动,如图8所示,载具由Y轴直线电机驱动器提供Y轴驱动信号c驱动,并利用编码器或者光栅尺为线阵相机持续提供行脉冲触发信号b,当需要进行扫描拍摄时,提供帧触发高电平信号以驱动线阵相机拍摄。这样在扫描的时候,如果线阵相机的帧触发信号a和被拍摄物开始移动的信号(Y轴驱动信号c)不同步,就会使相机拍摄出来的图有拉伸或失真,例如,如图10中,当帧触发信号a(高电平在触发位置2时),早于Y轴驱动信号c触发时(被检测物体在t=t1时开始移动),由于被检测物体未发生移动,导致使实际的被检测的物体在同一位置多次拍摄,出现图像拉伸现象;当帧触发信号a(高电平在触发位置3时),晚于Y轴驱动信号c触发时(被检测物体在t=t1时开始移动),由于被检测物体已移动一段距离,导致使实际的被检测的物体部分漏拍摄,出现图像失真现象。
图9是本发明一种实施方式的线阵相机扫描方法中触发时序同步流程示意图,线阵相机扫描系统还包括与线阵相机连接的控制器和Y轴电机驱动器,所述载具在所述Y轴电机驱动器的驱动下沿Y轴运动,,触发信号的触发同步方式为:
S21,预先提供帧触发信号(高电平)到线阵相机;
S22,到达预设起始位置时,输出行触发信号驱动线阵相机拍摄。
其中,起始位置设置在帧触发信号开始之后。
步骤S21具体包括:控制器预先提供帧触发信号(高电平)到线阵相机,线阵相机进入预拍摄状态。
步骤S22具体包括:当载具运动到达预设起始位置时,Y轴电机开始输出行触发信号驱动线阵相机拍摄。行触发信号均为方波信号,行触发信号每一个上升沿或下降沿触发线阵相机拍摄一次,当线阵相机的拍摄次数达到预设值时,线阵相机停止拍摄。
图10是本发明一种实施方式的线阵相机扫描方法中触发时序同步过程中帧触发信号、位置信号和行触发信号的时序波形图,参照图10,控制器向线阵相机发送帧触发信号a,当帧触发信号a由低电平变为高电平时,即t=t1时,线阵相机检测到帧触发信号的上升沿,线阵相机进入预拍摄状态,Y轴电机开始驱动载具沿Y方向移动,当载具移动至预设起始点y=y1时,即当起始位置是t=t2时,Y轴电机向线阵相机同步发送行触发信号b,行触发信号b为方波信号,线阵相机开始拍摄,Y轴电机驱动载具每移动预设间隔距离,相应的,Y轴电机向线阵相机发送一个方波信号,当行触发信号c由低电平变为高电平时,即t=t2时,线阵相机检测到行触发信号的上升沿,线阵相机进行第一次拍摄,行触发信号每一个上升沿触发线阵相机拍摄一次,当载具移动至预设结束点y=y2时,即当结束位置是t=t3时,线阵相机的拍摄次数达到预设值时,线阵相机停止拍摄。可根据实际待检测物体的长度预设起始点和结束点(起始点即待测物体进入线阵相机拍摄视野的第一点,结束点即待测物体移出线阵相机视野的最终点),根据行触发信号脉冲宽度和移动预设间隔距离,确定起始位置和结束位置,即确定Y轴电机发送行触发信号的方波个数,进而触发线阵相机拍摄,控制线阵相机拍摄的次数。或者根据实际待检测物体的长度预设起始点和结束结束点,根据行触发信号脉冲宽度和移动预设间隔距离,设置线阵相机的拍摄次数,在行触发信号的触发下,线阵相机计算拍摄次数,当线阵相机拍摄次数达到预设值时,线阵相机停止拍摄。本实施例中,行触发信号的第一个上升沿信号与起始位置同步,在起始点y1和结束点y2之间触发多次线阵相机拍摄,避免拍摄图像拉伸或失真,拍摄效果更好。
如图11所示,为本发明一种实施方式的线阵相机扫描方法的对焦过程的第一顺序选取标记点流程图,其中对多个标记点进行对焦的步骤为:S111:确定第一标记点,作为全对焦标记点,进行全对焦过程;S112:根据第一约束条件选择下一个标记点,作为半对焦标记点,进行半对焦过程;S113:将满足第二约束条件的标记点重新作为全对焦标记点进行对焦。
其中第一约束条件包括:
C0,与上一个标记点距离小于预设距离阈值;
C1,与上一个标记点距离最小;
C2,与上一个标记点位于同一个连通区域内;
第二约束条件为:与上一个标记点距离大于预设距离的标记点或利用半对焦过程获得的多个参考图像清晰度均小于预设清晰度的标记点。
在本实施例中,预设距离阈值d,选取与上一个标记点距离小于预设距离阈值d的待对焦标记点,再从选出的符合C0条件的待对焦标记点中,选择与上一个标记点距离最小的待对焦标记点,并判断此标记点与上一个标记点是否位于同一个连通区域内,若位于同一个连通区域内,则选择此待对焦标记点作为下一个标记点,并对其按照半对焦方式进行对焦,若不位于同一个连通区域内,则寻找下一个符合第一约束条件的待对焦标记点作为下一个标记点。通过对不同标记点,分别采用全对焦方式或半对焦方式进行对焦,使对焦效率更高。
在另一个实施例中,将与上一个标记点距离大于预设距离的标记点或利用半对焦过程获得的多个参考图像清晰度均小于预设清晰度的标记点重新作为全对焦标记点进行对焦。
其中与上一个标记点距离大于预设距离的标记点的情况指:如果当前标记点与前一个标记点之间的距离大于预设距离,则该点属于全对焦标记点,需要进行全对焦过程,其后续顺序中标记点以该标记点为参考进行半对焦过程。
以图12为本发明一种实施方式的线阵相机扫描方法的高精度对焦过程的标记点选取示意图,以图中列举的标记点六2046、标记点七2047、标记点八2048和标记点九2049为例。
当标记点八2048和标记点九2049之间的距离大于某一个预设距离时,标记点九2049以标记点八2048的第二焦点对应的高度位置作为参考进行精对焦时,会产生较大的误差,因此标记点九2049修改为进行全对焦的标记点,进行全对焦过程,即需要重新进行粗对焦过程和精对焦过程。
进行全对焦的标记点选取:为利用半对焦过程获得的多个参考图像清晰度均小于预设清晰度的标记点的情况指:如果当前标记点(半对焦标记点)利用半对焦过程获得的多个参考图像清晰度均小于预设清晰度,则该点转换为全对焦标记点,进行全对焦过程,其后续顺序中标记点以该全对焦标记点为参考进行半对焦过程。
在某一个实施例中,预设清晰度为60,即当判断精对焦时所有获取的图像的清晰度均小于60,则该标记点需转换为全对焦标记点,需要重新进行粗对焦过程和精对焦过程,后续顺序的相邻标记点则以该标记点为参考进行半对焦过程,这样避免了多次对焦导致的误差累计,可以及时进行动态校正,保证对焦的准确度。
如图13所示,为本发明一种实施方式的线阵相机扫描方法的列扫描示意图,其中扫描采用列扫描方式,按照预设的扫描宽度进行扫描,每个扫描列中都包含至少一个标记点,这些标记点具有不同的Y位置,其对应的Z轴位置也不同,扫描完成后,将扫描获取的条状扫描区域图像进行拼接和融合,图中可见以扫描宽度501对图像进行逐列扫描,直至覆盖整个待测图像。
在某一个实施例中,还包括扫描开始前,对所述图像进行空白区域检测,当检测到空白区域的宽度大于预设空白宽度时,扫描时跳过所述空白区域,如图中所示空白区域宽度502大于预设的空白宽度时,扫描时候跳过该区域,在扫描完成后进行图像拼接时,在此区域填充空白图像或者其他合理的图像。
如图14所示,为本发明一种实施方式的线阵相机扫描方法的扫描示意图,包括线阵相机102、物镜101、物镜移动方向106、载具201、目标物203、载具移动方向(Y轴方向)205、扫描宽度501和扫描方向601,由图可见,扫描是列扫描方式,扫描方向601与物镜移动方向(Z轴方向)106和载具移动方向(Y轴方向)205垂直相交,按照预设的扫描宽度501,沿着扫描方向601将待测图像区域划分成列区域,按照顺序进行一列一列扫描,每列扫描区域均包含至少一个标记点。
如图15所示,为本发明一种实施方式的线阵相机扫描方法的物镜焦距轨迹示意图,包括线阵相机102、物镜101、物镜移动方向(Z轴方向)106、载具201、目标物203、对焦标记点204、对焦标记点对应第二焦点位置701、物镜焦距轨迹107和载具移动方向(Y轴方向)205。
在该实施例中,假设一列扫描区域中包含六个标记点,每个标记点对应一个第二焦点位置,第二焦点位置即该标记点的最佳焦距位置,扫描时,物镜的焦距并不是一成不变的,物体表面凹凸不平,不同位置分布不同的标记点,物镜的焦距沿着这些标记点的最佳焦距位置进行动态调整,以达到最佳的扫描清晰度。
如图16所示,为本发明一种实施方式的一种线阵相机扫描装置结构框图,包括:目标图像获取模块,用于获取目标物图像,标记点获取模块,在目标物图像上选取多个标记点,对焦模块,用于按照第一顺序对所述多个标记点依次进行高精度对焦,以确定各个标记点的焦点位置,扫描模块,用于根据各个标记点的焦点位置对目标物进行扫描。在一些实施例中还包括图像拼接模块,用于在扫描完成后,将扫描获取的条状扫描区域图像进行拼接和融合,本装置用于执行上述任一种线阵相机扫描方法。
本发明通过线阵相机的物镜与载具共同移动,在不同的拍摄高度位置获取对焦标记点附近小区域参考图像,克服了现有技术中存在的以单条扫描线的清晰度作为最佳焦距的选择依据,从而导致容易出现焦点附近区域图像不清晰的现象,还通过线阵相机的拍摄触发信号由载具的移动触发产生,这样能在载具移动停止后,发送拍摄触发信号,避免线阵相机在载具移动时进行拍照,造成的图像失真或者错位现象,提高线阵相机对焦准确度,从而提高扫描精确度。
另外本发明还通过采用在目标物图像上选取多个标记点,对一些标记点进行包括粗对焦过程和精对焦过程的全对焦过程,以获取对应标记点的焦点位置,对另一些标记点进行以前一个标记点的焦点位置为第二中心位置,执行精对焦过程的半对焦过程,克服了现有技术中存在的多个对焦标记点进行对焦时需要逐一全对焦导致的对焦效率低的缺陷。
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
Claims (8)
1.一种线阵相机扫描方法,其用于线阵相机扫描系统,所述线阵相机扫描系统包括用于拍摄目标物的面阵相机和线阵拍摄部件和用于放置目标物的载具,所述线阵拍摄部件包括线阵相机和物镜,其特征在于,包括步骤:
获取目标物图像;
在目标物图像上选取多个标记点;
按照第一顺序对所述多个标记点依次进行高精度对焦,以确定各个标记点的焦点位置;
根据各个标记点的焦点位置利用线阵相机对目标物进行扫描;
所述扫描采用列扫描方式,按照预设的扫描宽度进行扫描,每个扫描列中图像均包含至少一个标记点;
所述在目标物图像上选取多个标记点,具体包括:
获取目标物图像的图像边缘和色彩信息;
根据所述图像边缘、所述色彩信息选取标记点;
根据标记点疏密程度,删除或增加标记点;
所述色彩信息包括灰色深浅度,所述获取图像边缘和色彩信息具体包括:
通过图像边缘提取算法提取目标物图像的图像边缘;
通过对目标物图像灰度化处理得到灰度图,提取灰度图的灰度值,得到灰色深浅度;
所述标记点包括边缘标记点和中央标记点,所述根据所述图像边缘、所述色彩信息选取标记点具体包括:
根据图像边缘,按照第一选取规则在所述图像边缘上选取若干个边缘标记点;
根据灰色深浅度,按照第二选取规则在图像中央区域选取若干个中央标记点;
所述第一选取规则为选取的相邻两个标记点之间的间隔距离为固定值;所述第二选取规则为预设灰度值阈值,当像素点灰度值大于灰度值阈值时,选取为标记点;
所述根据标记点疏密程度,删除或增加标记点具体包括:
预设相邻标记点间的间隔距离低阈值和间隔距离高阈值,判断各标记点与其相邻标记点间的间隔距离是否大于间隔距离低阈值并且小于间隔距离高阈值;
若标记点与其相邻标记点间的间隔距离大于间隔距离低阈值并且小于间隔距离高阈值,则保留该标记点;
若标记点与其相邻标记点间的间隔距离小于间隔距离低阈值,则删除该标记点;
若标记点与其相邻标记点间的间隔距离高于间隔距离高阈值,则在该标记点与其相邻标记点间增加标记点。
2.根据权利要求1所述的一种线阵相机扫描方法,其特征在于,所述高精度对焦具体包括全对焦过程或半对焦过程:
所述全对焦过程包括粗对焦过程和精对焦过程;
所述半对焦过程具体为:以前一个标记点的焦点位置为第二中心位置,执行精对焦过程;
所述粗对焦过程具体为:
利用线阵拍摄部件在多个拍摄高度位置拍摄目标物;
在每个拍摄高度位置,控制载具沿着横向方向移动,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,以组成该拍摄高度位置的参考图像,所述横向方向为垂直于所述线阵相机扫描线的方向;
根据不同高度位置的参考图像的清晰度,确定第一焦点对应的高度位置;
所述多个拍摄高度位置为位于预设第一起始高度位置和第一终止高度位置之间,所述物镜按照第一预设步进距离沿竖向轴线从第一起始高度位置移动到第一终止高度位置,形成多个拍摄高度位置;
所述第一起始高度位置对应的焦点位置高于目标物的上表面,所述第一终止高度位置对应的焦点位置低于目标物下表面;
所述精对焦过程具体为:
选取第一焦点对应的高度位置作为第二中心位置,并且以第二中心位置为中心获取第二起始高度位置和第二终止高度位置;
所述物镜按照第二预设步进距离沿竖向轴线从第二起始高度位置移动到第二终止高度位置,形成多个二次拍摄高度位置;
利用线阵拍摄部件在多个二次拍摄高度位置拍摄目标物;
在每个二次拍摄高度位置,控制载具沿着横向方向移动,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,以组成该拍摄高度位置的参考图像,所述横向方向为垂直于所述线阵相机扫描线的方向;
根据不同高度位置的参考图像的清晰度,确定第二焦点对应的高度位置。
3.根据权利要求2所述的一种线阵相机扫描方法,其特征在于,所述在每个拍摄高度位置,载具沿着横向方向移动,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像以组成该拍摄高度位置的参考图像,包括两种实施方式:
第一实施方式具体包括:
所述物镜移动到当前拍摄高度位置后,载具沿着横向方向从第一横向位置移动到第二横向位置,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像;然后所述物镜移动到下一拍摄高度位置,载具从第二横向位置移动到第一横向位置,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像;
第二实施方式具体包括:
所述物镜移动到当前拍摄高度位置后,载具沿着横向方向从第一横向位置移动到第二横向位置,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像,载具从第二横向位置移动回到第一横向位置;然后所述物镜移动到下一拍摄高度位置,载具沿着横向方向从第一横向位置移动到第二横向位置,所述线阵相机根据拍照触发信号在载具移动过程中拍摄多条扫描线图像。
4.根据权利要求3所述的一种线阵相机扫描方法,其特征在于,所述线阵相机扫描系统还包括与所述线阵相机连接的控制器和Y轴电机,所述载具在所述Y轴电机的驱动下沿Y轴运动,利用载具横向移动电机产生拍照触发信号;
预先提供帧触发信号到线阵相机;
到达预设起始位置时,输出行触发信号驱动线阵相机拍摄;
所述起始位置设置在所述帧触发信号开始之后;
所述预先提供帧触发信号到线阵相机具体包括:控制器预先提供帧触发信号到线阵相机,线阵相机进入预拍摄状态;
所述行触发信号为方波信号,所述行触发信号每一个上升沿或下降沿触发所述线阵相机拍摄一次,当所述线阵相机的拍摄次数达到预设值时,所述线阵相机停止拍摄。
5.根据权利要求2所述的一种线阵相机扫描方法,其特征在于,所述第一顺序指:
确定第一标记点,作为全对焦标记点,进行全对焦过程;
根据第一约束条件选择下一个标记点,作为半对焦标记点,进行半对焦过程;
将满足第二约束条件的标记点重新作为全对焦标记点进行对焦;
所述第一约束条件包括:
C0,与上一个标记点距离小于预设距离阈值;
C1,与上一个标记点距离最小;
C2,与上一个标记点位于同一个连通区域内;
所述第二约束条件为:与上一个标记点距离大于预设距离的标记点或利用半对焦过程获得的多个参考图像清晰度均小于预设清晰度的标记点。
6.根据权利要求1所述的一种线阵相机扫描方法,其特征在于,还包括步骤,扫描完成后,将扫描获取的条状扫描区域图像进行拼接和融合。
7.根据权利要求1所述的一种线阵相机扫描方法,其特征在于,还包括步骤,扫描开始前,对所述目标物图像进行空白区域检测,当检测到空白区域的宽度大于预设空白宽度时,扫描时跳过所述空白区域。
8.一种线阵相机扫描装置,其特征在于,包括:
目标图像获取模块,用于获取目标物图像;
标记点获取模块,用于在目标物图像上选取多个标记点;
对焦模块,用于按照第一顺序对所述多个标记点依次进行高精度对焦,以确定各个标记点的焦点位置;
扫描模块,用于根据各个标记点的焦点位置对目标物进行扫描;
所述扫描采用列扫描方式,按照预设的扫描宽度进行扫描,每个扫描列中图像均包含至少一个标记点;
所述在目标物图像上选取多个标记点,具体包括:
获取目标物图像的图像边缘和色彩信息;
根据所述图像边缘、所述色彩信息选取标记点;
根据标记点疏密程度,删除或增加标记点;
所述色彩信息包括灰色深浅度,所述获取图像边缘和色彩信息具体包括:
通过图像边缘提取算法提取目标物图像的图像边缘;
通过对目标物图像灰度化处理得到灰度图,提取灰度图的灰度值,得到灰色深浅度;
所述标记点包括边缘标记点和中央标记点,所述根据所述图像边缘、所述色彩信息选取标记点具体包括:
根据图像边缘,按照第一选取规则在所述图像边缘上选取若干个边缘标记点;
根据灰色深浅度,按照第二选取规则在图像中央区域选取若干个中央标记点;
所述第一选取规则为选取的相邻两个标记点之间的间隔距离为固定值;所述第二选取规则为预设灰度值阈值,当像素点灰度值大于灰度值阈值时,选取为标记点;
所述根据标记点疏密程度,删除或增加标记点具体包括:
预设相邻标记点间的间隔距离低阈值和间隔距离高阈值,判断各标记点与其相邻标记点间的间隔距离是否大于间隔距离低阈值并且小于间隔距离高阈值;
若标记点与其相邻标记点间的间隔距离大于间隔距离低阈值并且小于间隔距离高阈值,则保留该标记点;
若标记点与其相邻标记点间的间隔距离小于间隔距离低阈值,则删除该标记点;
若标记点与其相邻标记点间的间隔距离高于间隔距离高阈值,则在该标记点与其相邻标记点间增加标记点。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811137914.7A CN109270066B (zh) | 2018-09-28 | 2018-09-28 | 一种线阵相机扫描方法和装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811137914.7A CN109270066B (zh) | 2018-09-28 | 2018-09-28 | 一种线阵相机扫描方法和装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109270066A CN109270066A (zh) | 2019-01-25 |
| CN109270066B true CN109270066B (zh) | 2021-11-05 |
Family
ID=65198650
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811137914.7A Active CN109270066B (zh) | 2018-09-28 | 2018-09-28 | 一种线阵相机扫描方法和装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109270066B (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112399038B (zh) * | 2019-08-15 | 2022-08-09 | 上海微电子装备(集团)股份有限公司 | 激光封装设备与激光封装方法 |
| CN113766131B (zh) * | 2021-09-15 | 2022-05-13 | 广州市明美光电技术有限公司 | 一种多目标点对焦方法及应用该方法的数字切片扫描仪 |
| CN115546172B (zh) * | 2022-10-19 | 2023-06-30 | 广州纳动半导体设备有限公司 | 基于机器视觉的芯片载板-基板近零间隙测量方法 |
| CN117148477B (zh) * | 2023-09-05 | 2024-06-25 | 中国人民解放军国防科技大学 | 降水粒子多角度立体成像测量装置及方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008039968A2 (en) * | 2006-09-28 | 2008-04-03 | The Research Foundation Of State University Of New York | Apparatus, system, kit and method for heart mapping |
| CN101335837A (zh) * | 2007-06-28 | 2008-12-31 | 索尼株式会社 | 图像拍摄设备、摄影控制方法以及程序 |
| CN106573336A (zh) * | 2014-07-01 | 2017-04-19 | 奇欧瓦公司 | 用于使材料图案化的微加工方法和系统及使用该微加工系统的方法 |
| US9866916B1 (en) * | 2016-08-17 | 2018-01-09 | International Business Machines Corporation | Audio content delivery from multi-display device ecosystem |
| CN108369331A (zh) * | 2015-12-10 | 2018-08-03 | 佳能株式会社 | 显微镜系统及其控制方法 |
| CN108572438A (zh) * | 2017-03-07 | 2018-09-25 | 伊鲁米那股份有限公司 | 使用阻挡结构来进行改进的聚焦跟踪的系统和方法 |
| CN108989690A (zh) * | 2018-09-28 | 2018-12-11 | 深圳市盛世生物医疗科技有限公司 | 一种线阵相机多标记点对焦方法、装置、设备和存储介质 |
| CN109151319A (zh) * | 2018-09-28 | 2019-01-04 | 深圳市盛世生物医疗科技有限公司 | 一种多标记点目标物标记点对焦顺序的处理方法及装置 |
| CN109286751A (zh) * | 2018-09-28 | 2019-01-29 | 深圳市盛世智能装备有限公司 | 一种线阵相机对焦方法、装置、设备和存储介质 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7728845B2 (en) * | 1996-02-26 | 2010-06-01 | Rah Color Technologies Llc | Color calibration of color image rendering devices |
| AU9119098A (en) * | 1997-08-25 | 1999-03-16 | Richard A. Holub | A system for distributing and controlling color reproduction at multiple sites |
| EP2353042A4 (en) * | 2008-10-14 | 2013-06-26 | Sanford Burnham Med Res Inst | AUTOMATED SCANNING CYTOMETRY USING CHROMATIC ABERRATION FOR ACQUIRING MULTIPLANE IMAGES |
| EP2244484B1 (en) * | 2009-04-22 | 2012-03-28 | Raytrix GmbH | Digital imaging method for synthesizing an image using data recorded with a plenoptic camera |
| CN202017854U (zh) * | 2010-12-31 | 2011-10-26 | 深圳市盛世天创传媒科技有限公司 | 一种摄像辅助系统 |
| CN102333171A (zh) * | 2011-09-22 | 2012-01-25 | 山东易创电子有限公司 | 一种基于线阵ccd系统的图像扫描方法及系统 |
| CN102724401B (zh) * | 2012-05-18 | 2016-04-27 | 深圳大学 | 一种线阵ccd相机多点自动调焦方法 |
| CN102752511B (zh) * | 2012-07-09 | 2016-07-27 | 宁波江丰生物信息技术有限公司 | 线阵扫描系统焦点的获取方法、装置和线阵扫描系统 |
| CN105701809B (zh) * | 2016-01-11 | 2018-09-14 | 宁波江丰生物信息技术有限公司 | 一种基于线阵相机扫描的平场校正方法 |
-
2018
- 2018-09-28 CN CN201811137914.7A patent/CN109270066B/zh active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008039968A2 (en) * | 2006-09-28 | 2008-04-03 | The Research Foundation Of State University Of New York | Apparatus, system, kit and method for heart mapping |
| CN101335837A (zh) * | 2007-06-28 | 2008-12-31 | 索尼株式会社 | 图像拍摄设备、摄影控制方法以及程序 |
| CN106573336A (zh) * | 2014-07-01 | 2017-04-19 | 奇欧瓦公司 | 用于使材料图案化的微加工方法和系统及使用该微加工系统的方法 |
| CN108369331A (zh) * | 2015-12-10 | 2018-08-03 | 佳能株式会社 | 显微镜系统及其控制方法 |
| US9866916B1 (en) * | 2016-08-17 | 2018-01-09 | International Business Machines Corporation | Audio content delivery from multi-display device ecosystem |
| CN108572438A (zh) * | 2017-03-07 | 2018-09-25 | 伊鲁米那股份有限公司 | 使用阻挡结构来进行改进的聚焦跟踪的系统和方法 |
| CN108989690A (zh) * | 2018-09-28 | 2018-12-11 | 深圳市盛世生物医疗科技有限公司 | 一种线阵相机多标记点对焦方法、装置、设备和存储介质 |
| CN109151319A (zh) * | 2018-09-28 | 2019-01-04 | 深圳市盛世生物医疗科技有限公司 | 一种多标记点目标物标记点对焦顺序的处理方法及装置 |
| CN109286751A (zh) * | 2018-09-28 | 2019-01-29 | 深圳市盛世智能装备有限公司 | 一种线阵相机对焦方法、装置、设备和存储介质 |
Non-Patent Citations (2)
| Title |
|---|
| "电润湿法"使拍照手机实现无机械配件自动对焦;王丽英;《技术前沿》;20051208;第11卷(第11期);第33页 * |
| Surface area-based focus criterion for multi-focus image fusion;Nejati Mansour;《Information Fusion》;20171231;第36卷(第36期);第284-295页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109270066A (zh) | 2019-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109270066B (zh) | 一种线阵相机扫描方法和装置 | |
| US5912699A (en) | Method and apparatus for rapid capture of focused microscopic images | |
| US7920182B2 (en) | Digital camera with non-uniform image resolution | |
| CN101630061B (zh) | 工具痕迹光学共聚焦三维数据采集方法 | |
| EP1343332A2 (en) | Stereoscopic image characteristics examination system | |
| CN109286751B (zh) | 一种线阵相机对焦方法、装置、设备和存储介质 | |
| CN113115027B (zh) | 校准摄像头的方法和系统 | |
| CN112634376B (zh) | 标定方法及装置、标定设备和存储介质 | |
| CN1727983B (zh) | 选通脉冲照明 | |
| KR20150135431A (ko) | 고속 촬상 방법 및 고속 촬상 장치 | |
| CN114113116B (zh) | 一种大口径元件表面微缺陷精确检测工艺方法 | |
| CN102752511A (zh) | 线阵扫描系统焦点的获取方法、装置和线阵扫描系统 | |
| JP5668227B2 (ja) | 画像測定装置 | |
| CN109493418B (zh) | 一种基于LabVIEW的三维点云获取方法 | |
| JP2012247743A (ja) | 解像度検査用チャート及び解像度の検査方法 | |
| CN112461853B (zh) | 自动对焦方法及系统 | |
| CN109151319B (zh) | 一种多标记点目标物标记点对焦顺序的处理方法及装置 | |
| CN112710662B (zh) | 生成方法及装置、生成系统和存储介质 | |
| US20080008381A1 (en) | Coordinate acquisition apparatus for test of printed board, and coordinate acquisition method and program for test thereof | |
| CN105651699A (zh) | 一种基于面阵相机的动态跟焦方法 | |
| JP2008014646A (ja) | 基板検査方法 | |
| CN109361854A (zh) | 一种基于mtf的摄像机调焦方法、装置及系统 | |
| CN112584047B (zh) | 一种面阵相机连续扫描成像的控制方法 | |
| JP4062100B2 (ja) | 形状測定装置 | |
| CN113777040A (zh) | 线阵相机的调焦方法、装置及自动光学检测设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP01 | Change in the name or title of a patent holder |
Address after: 518108 Huike Industrial Park, No. 1 Industrial Road, Shilong Community, Shiyan Street, Baoan District, Shenzhen City, Guangdong Province Patentee after: Shenzhen Shengshi Intelligent Equipment Co.,Ltd. Address before: 518108 Huike Industrial Park, No. 1 Industrial Road, Shilong Community, Shiyan Street, Baoan District, Shenzhen City, Guangdong Province Patentee before: SHENZHEN SUNSON INTELLIGENT EQUIPMENT Co.,Ltd. |
|
| CP01 | Change in the name or title of a patent holder |