Paper:
Effect of Robotic Pile-Up Mechanism on Cooperative Transportation for Versatile Objects
Yuichiro Sueoka
 , Wei Jie Yong, Naoto Takebe, Yasuhiro Sugimoto
, and Koichi Osuka
, Wei Jie Yong, Naoto Takebe, Yasuhiro Sugimoto
, and Koichi Osuka
Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

In recent years, cooperative transportation systems using multiple mobile robots have been studied. The advantage will be to transport objects that cannot be dealt with by a single robot and transport them by using smaller robots. Although cooperative transportation by a group of robots has been studied, the conventional transportation targets are limited to objects whose posture is stable. In this paper, we propose a system in which robots pile up on each other to support an object, aiming at a system for more versatile object transportation, including unstable objects. After deriving the conditions by modeling the support system in object transportation, we verify the transporting performance including the robotic pile-up effect through actual robot experiments.
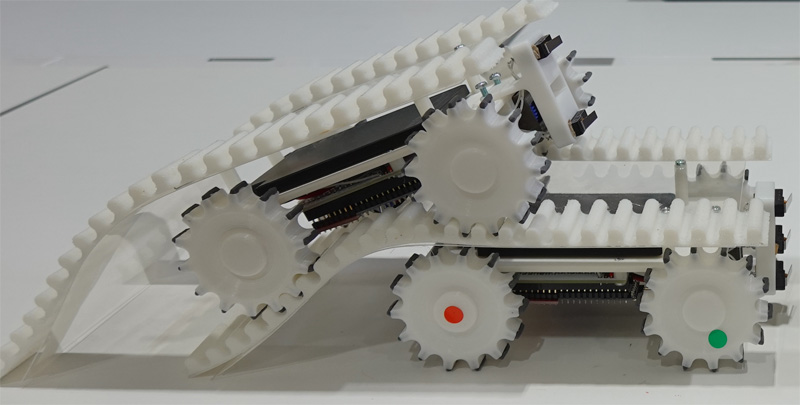
Proposed robots with a pile-up mechanism
- [1] E. Şahin, “Swarm robotics: From sources of inspiration to domains of application,” Int. Workshop on Swarm Robotics, pp. 10-20, 2004. https://doi.org/10.1007/978-3-540-30552-1_2
- [2] M. Rubenstein, A. Cornejo, and R. Nagpal, “Programmable self-assembly in a thousand-robot swarm,” Science, Vol.345, No.6198, pp. 795-799, 2014. https://doi.org/10.1126/science.1254295
- [3] J. Werfel, K. Peterson, and R. Nagpal, “Designing Collective Behavior in a Termite-Inspired Robot Construction Team,” Science, Vol.343, No.6172, pp. 754-758, 2014. https://doi.org/10.1126/science.1245842
- [4] L. Bayindir, “A review of swarm robotics tasks,” Neurocomputing, Vol.172, pp. 292-321, 2016. https://doi.org/10.1016/j.neucom.2015.05.116
- [5] T. Arai, E. Pagello, and L. E. Parker, “Guest editorial advances in multirobot systems,” IEEE Trans. on Robotics and Automation, Vol.18, No.5, pp. 655-661, 2002. https://doi.org/10.1109/TRA.2002.806024
- [6] Y. Kantaros, M. Thanou, and A. Tzes, “Distributed coverage control for concave areas by a heterogeneous robot-swarm with visibility sensing constraints,” Automatica, Vol.53, pp. 195-207, 2015. https://doi.org/10.1016/j.automatica.2014.12.034
- [7] K. Sakurama, S. Azuma, and T. Sugie, “Multiagent Coordination Via Distributed Pattern Matching,” IEEE Trans. on Automatic Control, Vol.64, No.8, pp. 3210-3225, 2019. https://doi.org/10.1109/TAC.2018.2885491
- [8] K. Sakurama, “Unified Formulation of Multiagent Coordination With Relative Measurements,” IEEE Trans. on Automatic Control, Vol.66, No.9, pp. 4101-4116, 2021. https://doi.org/10.1109/TAC.2020.3030761
- [9] D. Saldana, R. J. Alitappeh, L. C. A. Pimenta, and R. Assuncao, “Dynamic perimeter surveillance with a team of robots,” Proc. IEEE Int. Conf. Robot. Autom., pp. 5289-5294, 2016. https://doi.org/10.1109/ICRA.2016.7487740
- [10] E. Tuci, M. H. Alkilabi, and O. Akanyeti, “Cooperative object transport in multi-robot systems: A review of the state-of- the-art,” Front. Robot. AI, Vol.5, No.59, 2018. https://doi.org/10.3389/frobt.2018.00059
- [11] J. Sasaki, J. Ota, E. Yoshida, D. Kurabayashi, and T. Arai, “Cooperating grasping of a large object by multiple mobile robots,” Proc. of 1995 IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 1205-1210, 1995. https://doi.org/10.1109/ROBOT.1995.525444
- [12] K. Kosuge and T. Oosumi, “Decentralized control of multiple robots handling an object,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 318-323, 1996. https://doi.org/10.1109/IROS.1996.570694
- [13] Z. Wang and M. Schwager, “Kinematic multi-robot manipulation with no communication using force feedback,” 2016 IEEE Int. Conf. on Robotics and Automation, pp. 427-432, 2016. https://doi.org/10.1109/ICRA.2016.7487163
- [14] M. Dorigo, “SWARM-BOT: an experiment in swarm robotics,” Proc. of 2005 IEEE Swarm Intelligence Symposium, pp. 192-200, 2005. https://doi.org/10.1109/SIS.2005.1501622
- [15] C. Kube and H. Zhang, “Collective Robotics: From Social Insects to Robots,” Adaptive Behavior, Vol.2, No.2, pp. 189-219, 1994. https://doi.org/10.1177/105971239300200204
- [16] M. J. Mataric, M. Nilsson, and K. T. Simsarin, “Cooperative multi-robot box-pushing,” Proc. of 1995 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Human Robot Interaction and Cooperative Robots, pp. 556-561, 1995. https://doi.org/10.1109/IROS.1995.525940
- [17] J. Chen, M. Gauci, W. Li, A. Kolling, and R. Groß, “Occlusion-Based Cooperative Transport with a Swarm of Miniature Mobile Robots,” IEEE Trans. on Robotics, Vol.31, No.2, pp. 307-321, 2015. https://doi.org/10.1109/TRO.2015.2400731
- [18] R. Fujisawa, S. Dobata, K. Sugawara, and F. Matsuno, “Designing pheromone communication in swarm robotics: Group foraging behavior mediated by chemical substance,” Swarm Intelligence, Vol.8, No.3, pp. 227-246, 2014. https://doi.org/10.1007/s11721-014-0097-z
- [19] Z.-D. Wang, Y. Takano, Y. Hirata, and K. Kosuge, “A pushing leader based decentralized control method for cooperative object transportation,” Proc. of 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1035-1040, 2004. https://doi.org/10.1109/IROS.2004.1389489
- [20] J. Spletzer, A. K. Das, R. Fierro, C. J. Taylor, V. Kumar, and J. P. Ostrowski, “Cooperative localization and control for multi-robot manipulation,” Proc. of 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 631-636, 2001. https://doi.org/10.1109/IROS.2001.976240
- [21] G. A. S. Pereira, M. F. M. Campos, and V. Kumar, “Decentralized Algorithms for Multi-Robot Manipulation via Caging,” The Int. J. of Robotics Research, Vol.23, No.7-8, pp. 783-795, 2004. https://doi.org/10.1177/02783649040454
- [22] Y. Ishiyama, “Motions of rigid bodies and criteria for overturning by earthquake excitations,” Earthquake Engineering and Structural Dynamics, Vol.10, pp. 635-650, 1982. https://doi.org/10.1002/eqe.4290100502
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.