The orbit of a planet is an ellipse with the Sun at one of the two foci.
A line segment joining a planet and the Sun sweeps out equal areas during equal intervals of time.
The square of a planet's orbital period is proportional to the cube of the length of the semi-major axis of its orbit.
The elliptical orbits of planets were indicated by calculations of the orbit of Mars. From this, Kepler inferred that other bodies in the Solar System, including those farther away from the Sun, also have elliptical orbits. The second law establishes that when a planet is closer to the Sun, it travels faster. The third law expresses that the farther a planet is from the Sun, the longer its orbital period.
The Sun is approximately at the center of the orbit.
The speed of the planet in the main orbit is constant.
Despite being correct in saying that the planets revolved around the Sun, Copernicus was incorrect in defining their orbits. Introducing physical explanations for movement in space beyond just geometry, Kepler correctly defined the orbit of planets as follows:[1][2][5]:53–54
The planetary orbit is not a circle with epicycles, but an ellipse.
The Sun is not at the center but at a focal point of the elliptical orbit.
Neither the linear speed nor the angular speed of the planet in the orbit is constant, but the area speed (closely linked historically with the concept of angular momentum) is constant.
The eccentricity of the orbit of the Earth makes the time from the March equinox to the September equinox, around 186 days, unequal to the time from the September equinox to the March equinox, around 179 days. A diameter would cut the orbit into equal parts, but the plane through the Sun parallel to the equator of the Earth cuts the orbit into two parts with areas in a 186 to 179 ratio, so the eccentricity of the orbit of the Earth is approximately
which is close to the correct value (0.016710218). The accuracy of this calculation requires that the two dates chosen be along the elliptical orbit's minor axis and that the midpoints of each half be along the major axis. As the two dates chosen here are equinoxes, this will be correct when perihelion, the date the Earth is closest to the Sun, falls on a solstice. The current perihelion, near January 4, is fairly close to the solstice of December 21 or 22.
Nomenclature
It took nearly two centuries for the current formulation of Kepler's work to take on its settled form. Voltaire's Eléments de la philosophie de Newton (Elements of Newton's Philosophy) of 1738 was the first publication to use the terminology of "laws".[6][7] The Biographical Encyclopedia of Astronomers in its article on Kepler (p.620) states that the terminology of scientific laws for these discoveries was current at least from the time of Joseph de Lalande.[8] It was the exposition of Robert Small, in An account of the astronomical discoveries of Kepler (1814) that made up the set of three laws, by adding in the third.[9] Small also claimed, against the history, that these were empirical laws, based on inductive reasoning.[7][10]
Further, the current usage of "Kepler's Second Law" is something of a misnomer. Kepler had two versions, related in a qualitative sense: the "distance law" and the "area law". The "area law" is what became the Second Law in the set of three; but Kepler did himself not privilege it in that way.[11]
History
Kepler published his first two laws about planetary motion in 1609,[12] having found them by analyzing the astronomical observations of Tycho Brahe.[13][14][15][5]:53 Kepler's third law was published in 1619.[16][14] Kepler had believed in the Copernican model of the Solar System, which called for circular orbits, but he could not reconcile Brahe's highly precise observations with a circular fit to Mars' orbit – Mars coincidentally having the highest eccentricity of all planets except Mercury.[17] His first law reflected this discovery.
In 1621, Kepler noted that his third law applies to the four brightest moons of Jupiter.[Nb 1]Godefroy Wendelin also made this observation in 1643.[Nb 2] The second law, in the "area law" form, was contested by Nicolaus Mercator in a book from 1664, but by 1670 his Philosophical Transactions were in its favour.[18][19] As the century proceeded it became more widely accepted.[20] The reception in Germany changed noticeably between 1688, the year in which Newton's Principia was published and was taken to be basically Copernican, and 1690, by which time work of Gottfried Leibniz on Kepler had been published.[21]
Newton was credited with understanding that the second law is not special to the inverse square law of gravitation, being a consequence just of the radial nature of that law, whereas the other laws do depend on the inverse square form of the attraction. Carl Runge and Wilhelm Lenz much later identified a symmetry principle in the phase space of planetary motion (the orthogonal group O(4) acting) which accounts for the first and third laws in the case of Newtonian gravitation, as conservation of angular momentum does via rotational symmetry for the second law.[22]
Formulary
The mathematical model of the kinematics of a planet subject to the laws allows a large range of further calculations.
First law
Kepler's first law states that:
The orbit of every planet is an ellipse with the sun at one of the two foci.
Kepler's first law placing the Sun at one of the foci of an elliptical orbitHeliocentric coordinate system (r,θ) for ellipse. Also shown are: semi-major axis a, semi-minor axis b and semi-latus rectum p; center of ellipse and its two foci marked by large dots. For θ = 0°, r = rmin and for θ = 180°, r = rmax.
Mathematically, an ellipse can be represented by the formula:
where is the semi-latus rectum, ε is the eccentricity of the ellipse, r is the distance from the Sun to the planet, and θ is the angle to the planet's current position from its closest approach, as seen from the Sun. So (r,θ) are polar coordinates.
For an ellipse 0<ε<1; in the limiting case ε = 0, the orbit is a circle with the Sun at the centre (i.e. where there is zero eccentricity).
The special case of a circle is ε = 0, resulting in r = p = rmin = rmax = a = b and A = πr2.
Second law
Kepler's second law states that:
A line joining a planet and the Sun sweeps out equal areas during equal intervals of time.[23]
The same (blue) area is swept out in a fixed time period. The green arrow is velocity. The purple arrow directed towards the Sun is the acceleration. The other two purple arrows are acceleration components parallel and perpendicular to the velocity.
The orbital radius and angular velocity of the planet in the elliptical orbit will vary. This is shown in the animation: the planet travels faster when closer to the Sun, then slower when farther from the Sun. Kepler's second law states that the blue sector has constant area.
History and proofs
Kepler notably arrived at this law through assumptions that were either only approximately true or outright false and can be outlined as follows:
Planets are pushed around the Sun by a force from the Sun. This false assumption relies on incorrect Aristotelian physics that an object needs to be pushed to maintain motion.
The propelling force from the Sun is inversely proportional to the distance from the Sun. Kepler reasoned this, believing that gravity spreading in three dimensions would be a waste, since the planets inhabited a plane. Thus, an inverse instead of the [correct] inverse square law.
Because Kepler believed that force would be proportional to velocity, it followed from statements #1 and #2 that velocity would be inverse to the distance from the sun. This is also an incorrect tenet of Aristotelian physics.
Since velocity is inverse to time, the distance from the sun would be proportional to the time to cover a small piece of the orbit. This is approximately true for elliptical orbits.
The area swept out is proportional to the overall time. This is also approximately true.
The orbits of a planet are circular (Kepler discovered his Second Law before his First Law, which contradicts this).
Nevertheless, the result of the Second Law is exactly true, as it is logically equivalent to the conservation of angular momentum, which is true for any body experiencing a radially symmetric force.[24] A correct proof can be shown through this. Since the cross product of two vectors gives the area of a parallelogram possessing sides of those vectors, the triangular area dA swept out in a short period of time is given by half the cross product of the r and dx vectors, for some short piece of the orbit, dx.
for a small piece of the orbit dx and time to cover it dt.
Thus
Since the final expression is proportional to the total angular momentum , Kepler's equal area law will hold for any system that conserves angular momentum. Since any radial force will produce no torque on the planet's motion, angular momentum will be conserved.
In terms of elliptical parameters
In a small time the planet sweeps out a small triangle having base line and height and area , so the constant areal velocity is
The area enclosed by the elliptical orbit is . So the period satisfies
Planet orbiting the Sun in a circular orbit (e=0.0)
Planet orbiting the Sun in an orbit with e=0.5
Planet orbiting the Sun in an orbit with e=0.2
Planet orbiting the Sun in an orbit with e=0.8
The red ray rotates at a constant angular velocity and with the same orbital time period as the planet, .
S: Sun at the primary focus, C: Centre of ellipse, S': The secondary focus. In each case, the area of all sectors depicted is identical.
Third law
Kepler's third law states that:
The ratio of the square of an object's orbital period with the cube of the semi-major axis of its orbit is the same for all objects orbiting the same primary.
This captures the relationship between the distance of planets from the Sun, and their orbital periods.
Kepler enunciated in 1619[16] this third law in a laborious attempt to determine what he viewed as the "music of the spheres" according to precise laws, and express it in terms of musical notation.[25] It was therefore known as the harmonic law.[26] The original form of this law (referring to not the semi-major axis, but rather a "mean distance") holds true only for planets with small eccentricities near zero.[27]
Using Newton's law of gravitation (published 1687), this relation can be found in the case of a circular orbit by setting the centripetal force equal to the gravitational force:
Then, expressing the angular velocity ω in terms of the orbital period and then rearranging, results in Kepler's Third Law:
A more detailed derivation can be done with general elliptical orbits, instead of circles, as well as orbiting the center of mass, instead of just the large mass. This results in replacing a circular radius, , with the semi-major axis, , of the elliptical relative motion of one mass relative to the other, as well as replacing the large mass with . However, with planet masses being so much smaller than the Sun, this correction is often ignored. The full corresponding formula is:
where is the mass of the Sun, is the mass of the planet, is the gravitational constant, is the orbital period and is the elliptical semi-major axis, and is the astronomical unit, the average distance from earth to the sun.
Table
The following table shows the data used by Kepler to empirically derive his law:
Data used by Kepler (1618)
Planet
Mean distance to sun (AU)
Period (days)
(10-6AU3/day2)
Mercury
0.389
87.77
7.64
Venus
0.724
224.70
7.52
Earth
1
365.25
7.50
Mars
1.524
686.95
7.50
Jupiter
5.20
4332.62
7.49
Saturn
9.510
10759.2
7.43
Kepler became aware of John Napier's recent invention of logarithms and log-log graphs before he discovered the pattern.[28]
I first believed I was dreaming... But it is absolutely certain and exact that the ratio which exists between the period times of any two planets is precisely the ratio of the 3/2th power of the mean distance.
—translated from Harmonies of the World by Kepler (1619)
Log-log plot of period T vs semi-major axis a (average of aphelion and perihelion) of some Solar System orbits (crosses denoting Kepler's values) showing that a³/T² is constant (green line)
The direction of the acceleration is towards the Sun.
The magnitude of the acceleration is inversely proportional to the square of the planet's distance from the Sun (the inverse square law).
This implies that the Sun may be the physical cause of the acceleration of planets. However, Newton states in his Principia that he considers forces from a mathematical point of view, not a physical, thereby taking an instrumentalist view.[30] Moreover, he does not assign a cause to gravity.[31]
Newton defined the force acting on a planet to be the product of its mass and the acceleration (see Newton's laws of motion). So:
Every planet is attracted towards the Sun.
The force acting on a planet is directly proportional to the mass of the planet and is inversely proportional to the square of its distance from the Sun.
All bodies in the Solar System attract one another.
The force between two bodies is in direct proportion to the product of their masses and in inverse proportion to the square of the distance between them.
As the planets have small masses compared to that of the Sun, the orbits conform approximately to Kepler's laws. Newton's model improves upon Kepler's model, and fits actual observations more accurately. (See two-body problem.)
Below comes the detailed calculation of the acceleration of a planet moving according to Kepler's first and second laws.
From the heliocentric point of view consider the vector to the planet where is the distance to the planet and is a unit vector pointing towards the planet.
where is the unit vector whose direction is 90 degrees counterclockwise of , and is the polar angle, and where a dot on top of the variable signifies differentiation with respect to time.
Differentiate the position vector twice to obtain the velocity vector and the acceleration vector:
So where the radial acceleration is and the transversal acceleration is
Inverse square law
Kepler's second law says that is constant.
The transversal acceleration is zero:
So the acceleration of a planet obeying Kepler's second law is directed towards the Sun.
The radial acceleration is
Kepler's first law states that the orbit is described by the equation:
Differentiating with respect to time or
Differentiating once more
The radial acceleration satisfies
Substituting the equation of the ellipse gives
The relation gives the simple final result
This means that the acceleration vector of any planet obeying Kepler's first and second law satisfies the inverse square law where is a constant, and is the unit vector pointing from the Sun towards the planet, and is the distance between the planet and the Sun.
Since mean motion where is the period, according to Kepler's third law, has the same value for all the planets. So the inverse square law for planetary accelerations applies throughout the entire Solar System.
where is the mass of the planet and has the same value for all planets in the Solar System. According to Newton's third law, the Sun is attracted to the planet by a force of the same magnitude. Since the force is proportional to the mass of the planet, under the symmetric consideration, it should also be proportional to the mass of the Sun, . So where is the gravitational constant.
The acceleration of Solar System body number i is, according to Newton's laws: where is the mass of body j, is the distance between body i and body j, is the unit vector from body i towards body j, and the vector summation is over all bodies in the Solar System, besides i itself.
In the special case where there are only two bodies in the Solar System, Earth and Sun, the acceleration becomes which is the acceleration of the Kepler motion. So this Earth moves around the Sun according to Kepler's laws.
If the two bodies in the Solar System are Moon and Earth the acceleration of the Moon becomes
So in this approximation, the Moon moves around the Earth according to Kepler's laws.
In the three-body case the accelerations are
These accelerations are not those of Kepler orbits, and the three-body problem is complicated. But Keplerian approximation is the basis for perturbation calculations. (See Lunar theory.)
Position as a function of time
Kepler used his two first laws to compute the position of a planet as a function of time. His method involves the solution of a transcendental equation called Kepler's equation.
The procedure for calculating the heliocentric polar coordinates (r,θ) of a planet as a function of the time t since perihelion, is the following five steps:
Compute the mean motionn = (2π rad)/P, where P is the period.
Compute the mean anomalyM = nt, where t is the time since perihelion.
Compute the eccentric anomalyE by solving Kepler's equation: where is the eccentricity.
Compute the true anomalyθ by solving the equation:
Compute the heliocentric distance r: where is the semimajor axis.
The position polar coordinates (r,θ) can now be written as a Cartesian vector and the Cartesian velocity vector can then be calculated as , where is the standard gravitational parameter.[32]
The important special case of circular orbit, ε=0, gives θ = E = M. Because the uniform circular motion was considered to be normal, a deviation from this motion was considered an anomaly.
Geometric construction for Kepler's calculation of θ. The Sun (located at the focus) is labeled S and the planet P. The auxiliary circle is an aid to calculation. Line xd is perpendicular to the base and through the planet P. The shaded sectors are arranged to have equal areas by positioning of point y.
The Keplerian problem assumes an elliptical orbit and the four points:
The area swept since perihelion, is by Kepler's second law proportional to time since perihelion. So the mean anomaly, M, is proportional to time since perihelion, t. where n is the mean motion.
Eccentric anomaly, E
When the mean anomaly M is computed, the goal is to compute the true anomaly θ. The function θ=f(M) is, however, not elementary.[33] Kepler's solution is to use x as seen from the centre, the eccentric anomaly as an intermediate variable, and first compute E as a function of M by solving Kepler's equation below, and then compute the true anomaly θ from the eccentric anomaly E. Here are the details.
↑ In 1621, Johannes Kepler noted that Jupiter's moons obey (approximately) his third law in his Epitome Astronomiae Copernicanae [Epitome of Copernican Astronomy] (Linz ("Lentiis ad Danubium"), (Austria): Johann Planck, 1622), book 4, part 2, pages 554–555. From pp. 554–555: " ... plane ut est cum sex planet circa Solem, ... prodit Marius in suo mundo Ioviali ista 3.5.8.13 (vel 14. Galilæo) ... Periodica vero tempora prodit idem Marius ... sunt maiora simplis, minora vero duplis." (... just as it is clearly [true] among the six planets around the Sun, so also it is among the four [moons] of Jupiter, because around the body of Jupiter any [satellite] that can go farther from it, orbits slower, and even that [orbit's period] is not in the same proportion, but greater [than the distance from Jupiter]; that is, 3/2 (sescupla) of the proportion of each of the distances from Jupiter, which is clearly the very [proportion] as is used for the six planets above. In his [book] The World of Jupiter [Mundus Jovialis, 1614], [Simon Mayr or] "Marius" [1573–1624] presents these distances, from Jupiter, of the four [moons] of Jupiter: 3, 5, 8, 13 (or 14 [according to] Galileo) [Note: The distances of Jupiter's moons from Jupiter are expressed as multiples of Jupiter's diameter.] ... Mayr presents their time periods: 1 day 18 1/2 hours, 3 days 13 1/3 hours, 7 days 2 hours, 16 days 18 hours: for all [of these data] the proportion is greater than double, thus greater than [the proportion] of the distances 3, 5, 8, 13 or 14, although less than [the proportion] of the squares, which double the proportions of the distances, namely 9, 25, 64, 169 or 196, just as [a power of] 3/2 is also greater than 1 but less than 2.)
↑ Godefroy Wendelin wrote a letter to Giovanni Battista Riccioli about the relationship between the distances of the Jovian moons from Jupiter and the periods of their orbits, showing that the periods and distances conformed to Kepler's third law. See: Joanne Baptista Riccioli, Almagestum novum ... (Bologna (Bononia), (Italy): Victor Benati, 1651), volume 1, page 492 Scholia III. In the margin beside the relevant paragraph is printed: Vendelini ingeniosa speculatio circa motus & intervalla satellitum Jovis. (Wendelin's clever speculation about the movement and distances of Jupiter's satellites.) From p. 492: "III. Non minus Kepleriana ingeniosa est Vendelini ... & D. 7. 164/1000. pro penextimo, & D. 16. 756/1000. pro extimo." (No less clever [than] Kepler's is the most keen astronomer Wendelin's investigation of the proportion of the periods and distances of Jupiter's satellites, which he had communicated to me with great generosity [in] a very long and very learned letter. So, just as in [the case of] the larger planets, the planets' mean distances from the Sun are respectively in the 3/2 ratio of their periods; so the distances of these minor planets of Jupiter from Jupiter (which are 3, 5, 8, and 14) are respectively in the 3/2 ratio of [their] periods (which are 1.769 days for the innermost [Io], 3.554 days for the next to the innermost [Europa], 7.164 days for the next to the outermost [Ganymede], and 16.756 days for the outermost [Callisto]).)
Related Research Articles
In physics, the cross section is a measure of the probability that a specific process will take place in a collision of two particles. For example, the Rutherford cross-section is a measure of probability that an alpha particle will be deflected by a given angle during an interaction with an atomic nucleus. Cross section is typically denoted σ (sigma) and is expressed in units of area, more specifically in barns. In a way, it can be thought of as the size of the object that the excitation must hit in order for the process to occur, but more exactly, it is a parameter of a stochastic process.
In celestial mechanics, an orbit is the curved trajectory of an object such as the trajectory of a planet around a star, or of a natural satellite around a planet, or of an artificial satellite around an object or position in space such as a planet, moon, asteroid, or Lagrange point. Normally, orbit refers to a regularly repeating trajectory, although it may also refer to a non-repeating trajectory. To a close approximation, planets and satellites follow elliptic orbits, with the center of mass being orbited at a focal point of the ellipse, as described by Kepler's laws of planetary motion.
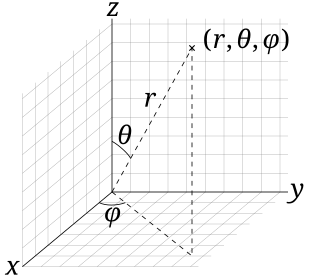
In mathematics, a spherical coordinate system is a coordinate system for three-dimensional space where the position of a given point in space is specified by three real numbers: the radial distancer along the radial line connecting the point to the fixed point of origin; the polar angleθ between the radial line and a given polar axis; and the azimuthal angleφ as the angle of rotation of the radial line around the polar axis. (See graphic regarding the "physics convention".) Once the radius is fixed, the three coordinates (r, θ, φ), known as a 3-tuple, provide a coordinate system on a sphere, typically called the spherical polar coordinates. The plane passing through the origin and perpendicular to the polar axis (where the polar angle is a right angle) is called the reference plane (sometimes fundamental plane).
Kinematics is a subfield of physics and mathematics, developed in classical mechanics, that describes the motion of points, bodies (objects), and systems of bodies without considering the forces that cause them to move. Kinematics, as a field of study, is often referred to as the "geometry of motion" and is occasionally seen as a branch of both applied and pure mathematics since it can be studied without considering the mass of a body or the forces acting upon it. A kinematics problem begins by describing the geometry of the system and declaring the initial conditions of any known values of position, velocity and/or acceleration of points within the system. Then, using arguments from geometry, the position, velocity and acceleration of any unknown parts of the system can be determined. The study of how forces act on bodies falls within kinetics, not kinematics. For further details, see analytical dynamics.
Orbital mechanics or astrodynamics is the application of ballistics and celestial mechanics to the practical problems concerning the motion of rockets, satellites, and other spacecraft. The motion of these objects is usually calculated from Newton's laws of motion and the law of universal gravitation. Orbital mechanics is a core discipline within space-mission design and control.
In physics, circular motion is movement of an object along the circumference of a circle or rotation along a circular arc. It can be uniform, with a constant rate of rotation and constant tangential speed, or non-uniform with a changing rate of rotation. The rotation around a fixed axis of a three-dimensional body involves the circular motion of its parts. The equations of motion describe the movement of the center of mass of a body, which remains at a constant distance from the axis of rotation. In circular motion, the distance between the body and a fixed point on its surface remains the same, i.e., the body is assumed rigid.
In classical mechanics, the Laplace–Runge–Lenz (LRL) vector is a vector used chiefly to describe the shape and orientation of the orbit of one astronomical body around another, such as a binary star or a planet revolving around a star. For two bodies interacting by Newtonian gravity, the LRL vector is a constant of motion, meaning that it is the same no matter where it is calculated on the orbit; equivalently, the LRL vector is said to be conserved. More generally, the LRL vector is conserved in all problems in which two bodies interact by a central force that varies as the inverse square of the distance between them; such problems are called Kepler problems.
In astrodynamics or celestial mechanics, an elliptic orbit or elliptical orbit is a Kepler orbit with an eccentricity of less than 1; this includes the special case of a circular orbit, with eccentricity equal to 0. In a stricter sense, it is a Kepler orbit with the eccentricity greater than 0 and less than 1. In a wider sense, it is a Kepler orbit with negative energy. This includes the radial elliptic orbit, with eccentricity equal to 1. They are frequently used during various astrodynamic calculations.
In celestial mechanics, the specific relative angular momentum of a body is the angular momentum of that body divided by its mass. In the case of two orbiting bodies it is the vector product of their relative position and relative linear momentum, divided by the mass of the body in question.
In the gravitational two-body problem, the specific orbital energy of two orbiting bodies is the constant sum of their mutual potential energy and their kinetic energy, divided by the reduced mass. According to the orbital energy conservation equation, it does not vary with time: where
In astrodynamics, an orbit equation defines the path of orbiting body around central body relative to , without specifying position as a function of time. Under standard assumptions, a body moving under the influence of a force, directed to a central body, with a magnitude inversely proportional to the square of the distance, has an orbit that is a conic section with the central body located at one of the two foci, or the focus.
Spacecraft flight dynamics is the application of mechanical dynamics to model how the external forces acting on a space vehicle or spacecraft determine its flight path. These forces are primarily of three types: propulsive force provided by the vehicle's engines; gravitational force exerted by the Earth and other celestial bodies; and aerodynamic lift and drag.
In classical mechanics, the Kepler problem is a special case of the two-body problem, in which the two bodies interact by a central force that varies in strength as the inverse square of the distance between them. The force may be either attractive or repulsive. The problem is to find the position or speed of the two bodies over time given their masses, positions, and velocities. Using classical mechanics, the solution can be expressed as a Kepler orbit using six orbital elements.
In physics, spherical multipole moments are the coefficients in a series expansion of a potential that varies inversely with the distance R to a source, i.e., as Examples of such potentials are the electric potential, the magnetic potential and the gravitational potential.
A pendulum is a body suspended from a fixed support such that it freely swings back and forth under the influence of gravity. When a pendulum is displaced sideways from its resting, equilibrium position, it is subject to a restoring force due to gravity that will accelerate it back towards the equilibrium position. When released, the restoring force acting on the pendulum's mass causes it to oscillate about the equilibrium position, swinging it back and forth. The mathematics of pendulums are in general quite complicated. Simplifying assumptions can be made, which in the case of a simple pendulum allow the equations of motion to be solved analytically for small-angle oscillations.
In classical mechanics, Newton's theorem of revolving orbits identifies the type of central force needed to multiply the angular speed of a particle by a factor k without affecting its radial motion. Newton applied his theorem to understanding the overall rotation of orbits that is observed for the Moon and planets. The term "radial motion" signifies the motion towards or away from the center of force, whereas the angular motion is perpendicular to the radial motion.
In celestial mechanics, a Kepler orbit is the motion of one body relative to another, as an ellipse, parabola, or hyperbola, which forms a two-dimensional orbital plane in three-dimensional space. A Kepler orbit can also form a straight line. It considers only the point-like gravitational attraction of two bodies, neglecting perturbations due to gravitational interactions with other objects, atmospheric drag, solar radiation pressure, a non-spherical central body, and so on. It is thus said to be a solution of a special case of the two-body problem, known as the Kepler problem. As a theory in classical mechanics, it also does not take into account the effects of general relativity. Keplerian orbits can be parametrized into six orbital elements in various ways.
In classical mechanics, the Udwadia–Kalaba formulation is a method for deriving the equations of motion of a constrained mechanical system. The method was first described by Anatolii Fedorovich Vereshchagin for the particular case of robotic arms, and later generalized to all mechanical systems by Firdaus E. Udwadia and Robert E. Kalaba in 1992. The approach is based on Gauss's principle of least constraint. The Udwadia–Kalaba method applies to both holonomic constraints and nonholonomic constraints, as long as they are linear with respect to the accelerations. The method generalizes to constraint forces that do not obey D'Alembert's principle.
In geometry, the major axis of an ellipse is its longest diameter: a line segment that runs through the center and both foci, with ends at the two most widely separated points of the perimeter. The semi-major axis is the longest semidiameter or one half of the major axis, and thus runs from the centre, through a focus, and to the perimeter. The semi-minor axis of an ellipse or hyperbola is a line segment that is at right angles with the semi-major axis and has one end at the center of the conic section. For the special case of a circle, the lengths of the semi-axes are both equal to the radius of the circle.
The Binet equation, derived by Jacques Philippe Marie Binet, provides the form of a central force given the shape of the orbital motion in plane polar coordinates. The equation can also be used to derive the shape of the orbit for a given force law, but this usually involves the solution to a second order nonlinear, ordinary differential equation. A unique solution is impossible in the case of circular motion about the center of force.
↑ Voltaire, Eléments de la philosophie de Newton [Elements of Newton's Philosophy] (London: 1738). See, for example:
From p. 162:"Par une des grandes loix de Kepler, toute Planete décrit des aires égales en temp égaux: par une autre loi non-moins sûre, chaque Planete fait sa révolution autour du Soleil en telle sort, que si, sa moyenne distance au Soleil est 10. prenez le cube de ce nombre, ce qui sera 1000., & le tems de la révolution de cette Planete autour du Soleil sera proportionné à la racine quarrée de ce nombre 1000." (By one of the great laws of Kepler, each planet describes equal areas in equal times; by another law no less certain, each planet makes its revolution around the sun in such a way that if its mean distance from the sun is 10, take the cube of that number, which will be 1000, and the time of the revolution of that planet around the sun will be proportional to the square root of that number 1000.)
From p. 205:"Il est donc prouvé par la loi de Kepler & par celle de Neuton, que chaque Planete gravite vers le Soleil, ..." (It is thus proved by the law of Kepler and by that of Newton, that each planet revolves around the sun ...)
↑ De la Lande, Astronomie, vol. 1 (Paris: Desaint & Saillant, 1764). See, for example:
From p. 390:"... mais suivant la fameuse loi de Kepler, qui sera expliquée dans le Livre suivant (892), le rapport des temps périodiques est toujours plus grand que celui des distances, une planete cinq fois plus éloignée du soleil, emploie à faire sa révolution douze fois plus de temps ou environ; ..." (... but according to the famous law of Kepler, which will be explained in the following book [i.e., chapter] (para. 892), the ratio of the periods is always greater than that of the distances [so that, for example,] a planet five times farther from the sun, requires about twelve times or so more time to make its revolution [around the sun] ...)
From p. 429:"Les Quarrés des Temps périodiques sont comme les Cubes des Distances. 892. La plus fameuse loi du mouvement des planetes découverte par Kepler, est celle du repport qu'il y a entre les grandeurs de leurs orbites, & le temps qu'elles emploient à les parcourir; ..." (The squares of the periods are as the cubes of the distances. 892. The most famous law of the movement of the planets discovered by Kepler is that of the relation between the sizes of their orbits and the times that the [planets] require to traverse them; ...)
From p. 430:"Les Aires sont proportionnelles au Temps. 895. Cette loi générale du mouvement des planetes devenue si importante dans l'Astronomie, sçavior, que les aires sont proportionnelles au temps, est encore une des découvertes de Kepler; ..." (Areas are proportional to times. 895. This general law of the movement of the planets [which has] become so important in astronomy, namely, that areas are proportional to times, is one of Kepler's discoveries; ...)
From p. 435:"On a appellé cette loi des aires proportionnelles aux temps, Loi de Kepler, aussi bien que celle de l'article 892, du nome de ce célebre Inventeur; ..." (One called this law of areas proportional to times (the law of Kepler) as well as that of para. 892, by the name of that celebrated inventor; ... )
↑ Robert Small, An account of the astronomical discoveries of Kepler (London: J Mawman, 1804), pp. 298–299.
↑ Astronomia nova Aitiologitis, seu Physica Coelestis tradita Commentariis de Motibus stellae Martis ex observationibus G.V. Tychnonis.Prague 1609; Engl. tr. W.H. Donahue, Cambridge 1992.
↑ In his Astronomia nova, Kepler presented only a proof that Mars' orbit is elliptical. Evidence that the other known planets' orbits are elliptical was presented only in 1621. See: Johannes Kepler, Astronomia nova ... (1609), p. 285. After having rejected circular and oval orbits, Kepler concluded that Mars' orbit must be elliptical. From the top of page 285: "Ergo ellipsis est Planetæ iter; ... " (Thus, an ellipse is the planet's [i.e., Mars'] path; ... ) Later on the same page: " ... ut sequenti capite patescet: ubi simul etiam demonstrabitur, nullam Planetæ relinqui figuram Orbitæ, præterquam perfecte ellipticam; ... " ( ... as will be revealed in the next chapter: where it will also then be proved that any figure of the planet's orbit must be relinquished, except a perfect ellipse; ... ) And then: "Caput LIX. Demonstratio, quod orbita Martis, ... , fiat perfecta ellipsis: ... " (Chapter 59. Proof that Mars' orbit, ... is a perfect ellipse: ... ) The geometric proof that Mars' orbit is an ellipse appears as Protheorema XI on pages 289–290. Kepler stated that every planet travels in elliptical orbits having the Sun at one focus in: Johannes Kepler, Epitome Astronomiae Copernicanae [Summary of Copernican Astronomy] (Linz ("Lentiis ad Danubium"), (Austria): Johann Planck, 1622), book 5, part 1, III. De Figura Orbitæ (III. On the figure [i.e., shape] of orbits), pages 658–665. From p. 658: "Ellipsin fieri orbitam planetæ ... " (Of an ellipse is made a planet's orbit ... ). From p. 659: " ... Sole (Foco altero huius ellipsis) ... " ( ... the Sun (the other focus of this ellipse) ... ).
↑ In his Astronomia nova ... (1609), Kepler did not present his second law in its modern form. He did that only in his Epitome of 1621. Furthermore, in 1609, he presented his second law in two different forms, which scholars call the "distance law" and the "area law".
His "distance law" is presented in: "Caput XXXII. Virtutem quam Planetam movet in circulum attenuari cum discessu a fonte." (Chapter 32. The force that moves a planet circularly weakens with distance from the source.) See: Johannes Kepler, Astronomia nova ... (1609), pp. 165–167.On page 167, Kepler states: " ... , quanto longior est αδ quam αε, tanto diutius moratur Planeta in certo aliquo arcui excentrici apud δ, quam in æquali arcu excentrici apud ε." ( ... , as αδ is longer than αε, so much longer will a planet remain on a certain arc of the eccentric near δ than on an equal arc of the eccentric near ε.) That is, the farther a planet is from the Sun (at the point α), the slower it moves along its orbit, so a radius from the Sun to a planet passes through equal areas in equal times. However, as Kepler presented it, his argument is accurate only for circles, not ellipses.
His "area law" is presented in: "Caput LIX. Demonstratio, quod orbita Martis, ... , fiat perfecta ellipsis: ... " (Chapter 59. Proof that Mars' orbit, ... , is a perfect ellipse: ... ), Protheorema XIV and XV, pp. 291–295. On the top p. 294, it reads: "Arcum ellipseos, cujus moras metitur area AKN, debere terminari in LK, ut sit AM." (The arc of the ellipse, of which the duration is delimited [i.e., measured] by the area AKM, should be terminated in LK, so that it [i.e., the arc] is AM.) In other words, the time that Mars requires to move along an arc AM of its elliptical orbit is measured by the area of the segment AMN of the ellipse (where N is the position of the Sun), which in turn is proportional to the section AKN of the circle that encircles the ellipse and that is tangent to it. Therefore, the area that is swept out by a radius from the Sun to Mars as Mars moves along an arc of its elliptical orbit is proportional to the time that Mars requires to move along that arc. Thus, a radius from the Sun to Mars sweeps out equal areas in equal times.
In 1621, Kepler restated his second law for any planet: Johannes Kepler, Epitome Astronomiae Copernicanae [Summary of Copernican Astronomy] (Linz ("Lentiis ad Danubium"), (Austria): Johann Planck, 1622), book 5, page 668. From page 668: "Dictum quidem est in superioribus, divisa orbita in particulas minutissimas æquales: accrescete iis moras planetæ per eas, in proportione intervallorum inter eas & Solem." (It has been said above that, if the orbit of the planet is divided into the smallest equal parts, the times of the planet in them increase in the ratio of the distances between them and the sun.) That is, a planet's speed along its orbit is inversely proportional to its distance from the Sun. (The remainder of the paragraph makes clear that Kepler was referring to what is now called angular velocity.)
1 2 Johannes Kepler, Harmonices Mundi [The Harmony of the World] (Linz, (Austria): Johann Planck, 1619), book 5, chapter 3, p. 189. From the bottom of p. 189: "Sed res est certissima exactissimaque quod proportio qua est inter binorum quorumcunque Planetarum tempora periodica, sit præcise sesquialtera proportionis mediarum distantiarum, ... " (But it is absolutely certain and exact that the proportion between the periodic times of any two planets is precisely the sesquialternate proportion [i.e., the ratio of 3:2] of their mean distances, ... ") An English translation of Kepler's Harmonices Mundi is available as: Johannes Kepler with E. J. Aiton, A. M. Duncan, and J. V. Field, trans., The Harmony of the World (Philadelphia, Pennsylvania: American Philosophical Society, 1997); see especially p. 411.
↑ Mercator, Nicolaus (1664). Nicolai Mercatoris Hypothesis astronomica nova, et consensus eius cum observationibus[Nicolaus Mercator's new astronomical hypothesis, and its agreement with observations] (in Latin). London, England: Leybourn.
↑ Mercator, Nic. (25 March 1670). "Some considerations of Mr. Nic. Mercator, concerning the geometrick and direct method of signior Cassini for finding the apogees, excentricities, and anomalies of the planets; ...". Philosophical Transactions of the Royal Society of London (in Latin). 5 (57): 1168–1175. doi:10.1098/rstl.1670.0018. Mercator criticized Cassini's method of finding, from three observations, an orbit's line of apsides. Cassini had assumed (wrongly) that planets move uniformly along their elliptical orbits. From p. 1174: "Sed cum id Observationibus nequaquam congruere animadverteret, mutavit sententiam, & lineam veri motus Planetæ æqualibus temporibus æquales areas Ellipticas verrere professus est: ... " (But when he noticed that it didn't agree at all with observations, he changed his thinking, and he declared that a line [from the Sun to a planet, denoting] a planet's true motion, sweeps out equal areas of an ellipse in equal periods of time: ... [which is the "area" form of Kepler's second law])
A derivation of Kepler's third law of planetary motion is a standard topic in engineering mechanics classes. See, for example: Meriam, J. L. (1971) [1966]. Dynamics (2nded.). New York: Wiley. pp.161–164. ISBN978-0-471-59601-1..
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.