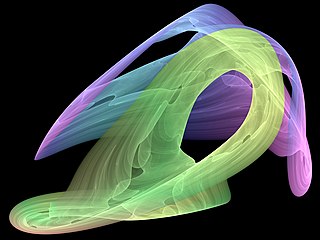
In mathematics, a dynamical system is a system in which a function describes the time dependence of a point in an ambient space. Examples include the mathematical models that describe the swinging of a clock pendulum, the flow of water in a pipe, the random motion of particles in the air, and the number of fish each springtime in a lake. The most general definition unifies several concepts in mathematics such as ordinary differential equations and ergodic theory by allowing different choices of the space and how time is measured. Time can be measured by integers, by real or complex numbers or can be a more general algebraic object, losing the memory of its physical origin, and the space may be a manifold or simply a set, without the need of a smooth space-time structure defined on it.
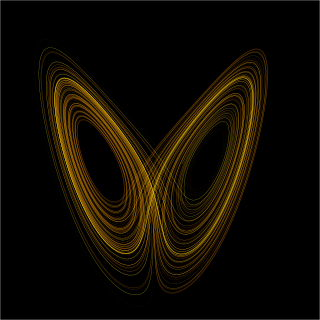
In the mathematical field of dynamical systems, an attractor is a set of states toward which a system tends to evolve, for a wide variety of starting conditions of the system. System values that get close enough to the attractor values remain close even if slightly disturbed.

In the mathematics of chaos theory, a horseshoe map is any member of a class of chaotic maps of the square into itself. It is a core example in the study of dynamical systems. The map was introduced by Stephen Smale while studying the behavior of the orbits of the van der Pol oscillator. The action of the map is defined geometrically by squishing the square, then stretching the result into a long strip, and finally folding the strip into the shape of a horseshoe.
In mathematics, symbolic dynamics is the practice of modeling a topological or smooth dynamical system by a discrete space consisting of infinite sequences of abstract symbols, each of which corresponds to a state of the system, with the dynamics (evolution) given by the shift operator. Formally, a Markov partition is used to provide a finite cover for the smooth system; each set of the cover is associated with a single symbol, and the sequences of symbols result as a trajectory of the system moves from one covering set to another.
A dynamical billiard is a dynamical system in which a particle alternates between free motion and specular reflections from a boundary. When the particle hits the boundary it reflects from it without loss of speed. Billiards are Hamiltonian idealizations of the game of billiards, but where the region contained by the boundary can have shapes other than rectangular and even be multidimensional. Dynamical billiards may also be studied on non-Euclidean geometries; indeed, the first studies of billiards established their ergodic motion on surfaces of constant negative curvature. The study of billiards which are kept out of a region, rather than being kept in a region, is known as outer billiard theory.
In mathematics, more particularly in the fields of dynamical systems and geometric topology, an Anosov map on a manifold M is a certain type of mapping, from M to itself, with rather clearly marked local directions of "expansion" and "contraction". Anosov systems are a special case of Axiom A systems.
In mathematics, structural stability is a fundamental property of a dynamical system which means that the qualitative behavior of the trajectories is unaffected by small perturbations.

In mathematics, a flow formalizes the idea of the motion of particles in a fluid. Flows are ubiquitous in science, including engineering and physics. The notion of flow is basic to the study of ordinary differential equations. Informally, a flow may be viewed as a continuous motion of points over time. More formally, a flow is a group action of the real numbers on a set.
In dynamical systems theory, a subset Λ of a smooth manifold M is said to have a hyperbolic structure with respect to a smooth map f if its tangent bundle may be split into two invariant subbundles, one of which is contracting and the other is expanding under f, with respect to some Riemannian metric on M. An analogous definition applies to the case of flows.
In mathematics, the Gibbs measure, named after Josiah Willard Gibbs, is a probability measure frequently seen in many problems of probability theory and statistical mechanics. It is a generalization of the canonical ensemble to infinite systems. The canonical ensemble gives the probability of the system X being in state x as
In mathematics, set-theoretic topology is a subject that combines set theory and general topology. It focuses on topological questions that are independent of Zermelo–Fraenkel set theory (ZFC).

In mathematics, a homoclinic orbit is a trajectory of a flow of a dynamical system which joins a saddle equilibrium point to itself. More precisely, a homoclinic orbit lies in the intersection of the stable manifold and the unstable manifold of an equilibrium.

In set theory, the axiom of limitation of size was proposed by John von Neumann in his 1925 axiom system for sets and classes. It formalizes the limitation of size principle, which avoids the paradoxes encountered in earlier formulations of set theory by recognizing that some classes are too big to be sets. Von Neumann realized that the paradoxes are caused by permitting these big classes to be members of a class. A class that is a member of a class is a set; a class that is not a set is a proper class. Every class is a subclass of V, the class of all sets. The axiom of limitation of size says that a class is a set if and only if it is smaller than V—that is, there is no function mapping it onto V. Usually, this axiom is stated in the equivalent form: A class is a proper class if and only if there is a function that maps it onto V.
In mathematics, ergodicity expresses the idea that a point of a moving system, either a dynamical system or a stochastic process, will eventually visit all parts of the space that the system moves in, in a uniform and random sense. This implies that the average behavior of the system can be deduced from the trajectory of a "typical" point. Equivalently, a sufficiently large collection of random samples from a process can represent the average statistical properties of the entire process. Ergodicity is a property of the system; it is a statement that the system cannot be reduced or factored into smaller components. Ergodic theory is the study of systems possessing ergodicity.
In mathematics, and in particular the study of dynamical systems, the idea of stable and unstable sets or stable and unstable manifolds give a formal mathematical definition to the general notions embodied in the idea of an attractor or repellor. In the case of hyperbolic dynamics, the corresponding notion is that of the hyperbolic set.
In dynamical systems theory, an area of pure mathematics, a Morse–Smale system is a smooth dynamical system whose non-wandering set consists of finitely many hyperbolic equilibrium points and hyperbolic periodic orbits and satisfying a transversality condition on the stable and unstable manifolds. Morse–Smale systems are structurally stable and form one of the simplest and best studied classes of smooth dynamical systems. They are named after Marston Morse, the creator of the Morse theory, and Stephen Smale, who emphasized their importance for smooth dynamics and algebraic topology.
Robert Edward "Rufus" Bowen was an internationally known professor in the Department of Mathematics at the University of California, Berkeley, who specialized in dynamical systems theory. Bowen's work dealt primarily with axiom A systems, but the methods he used while exploring topological entropy, symbolic dynamics, ergodic theory, Markov partitions, and invariant measures "have application far beyond the axiom A systems for which they were invented." The Bowen Lectures at the University of California, Berkeley, are given in his honor.

Charles Chapman Pugh is an American mathematician who researches dynamical systems. Pugh received his PhD under Philip Hartman of Johns Hopkins University in 1965, with the dissertation The Closing Lemma for Dimensions Two and Three. He has since been a professor, now emeritus, at the University of California, Berkeley.
Phase reduction is a method used to reduce a multi-dimensional dynamical equation describing a nonlinear limit cycle oscillator into a one-dimensional phase equation. Many phenomena in our world such as chemical reactions, electric circuits, mechanical vibrations, cardiac cells, and spiking neurons are examples of rhythmic phenomena, and can be considered as nonlinear limit cycle oscillators.
In the mathematical discipline of ergodic theory, a Sinai–Ruelle–Bowen (SRB) measure is an invariant measure that behaves similarly to, but is not an ergodic measure. In order to be ergodic, the time average would need to be equal the space average for almost all initial states , with being the phase space. For an SRB measure , it suffices that the ergodicity condition be valid for initial states in a set of positive Lebesgue measure.

