Development Report:
Redesigned Microcantilevers for Sensitivity Improvement of Microelectromechanical System Tactile Sensors
Ren Kaneta, Takumi Hasegawa, Jun Kido, Takashi Abe, and Masayuki Sohgawa
Graduate School of Science and Technology, Niigata University
8050 Ikarashi 2-no-cho, Nishi-ku, Niigata 950-2181, Japan

We previously reported a microelectromechanical system tactile sensor with elastomer-embedded microcantilevers. The sensor enabled the gripping control of soft objects by a robotic hand and acquisition of the object surface texture data. However, sensitivity improvement for more precise control and better texture information acquisition is desired. Here, the cantilever size and the sensor’s strain-gauge arrangement were redesigned, resulting in a sensor with significantly improved sensitivity. In addition, we report the sensitivity dependence on the cantilever size.
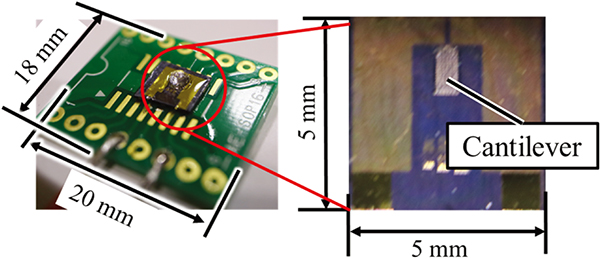
The tactile sensor chip and cantilever
- [1] Ministry of Economy, Trade and Industry, “Robot Introduction Demonstration Project Case Study Handbook 2018,” Japan Robot Manufacturers Association, 2018 (in Japanese).
- [2] K. Harada, “Research Trends on Assembly Automation by using Industrial Robots,” J. of the Japan Society for Precision Engineering, Vol.84, No.4, pp. 299-302, 2018 (in Japanese).
- [3] D. Kajita and N. Moronuki, “Reconfigurable Production Line Design Method for Human Workers – Robotic Cell Collaborated Line Considering Worker’s Attitude Toward Work,” Int. J. Automation Technol., Vol.15, No.6, pp. 754-763, 2021.
- [4] H. Shinoda, “Tactile sensing for dexterous hand,” J. Robot. Soc. Jpn., Vol.18, No.6, pp. 767-771, 2000.
- [5] A. Sugahara, “Tactile sensing technologies for dexterous robots,” Toshiba Rev., Vol.64, No.1, pp. 24-27, 2009.
- [6] Y. Tanaka, S. Shiraki, K. Katayama, K. Minamizawa, and D. Prattichizzo, “Bilaterally Shared Haptic Perception for Human-Robot Collaboration in Grasping Operation,” J. Robot. Mechatron., Vol.33, No.5, pp. 1104-1116, 2021.
- [7] S. Teshigawara, T. Tsutsumi, Y. Suzuki, and M. Shimojo, “High Speed and High Sensitivity Slip Sensor for Dexterous Grasping,” J. Robot. Mechatron., Vol.24, No.2, pp. 298-310, 2012.
- [8] Y. Wang, K. Xi, D. Mei, G. Liang, and Z. Chen, “A Flexible Tactile Sensor Array Based on Pressure Conductive Rubber for Contact Force Measurement and Slip Detection,” J. Robot. Mechatron., Vol.28, No.3, pp. 378-385, 2016.
- [9] R. S. Dahiya, G. Metta, M. Valle, and G. Sandini, “Tactile sensing – from humans to humanoids,” IEEE Trans. Robot., Vol.26, Issue 1, pp. 1-20, 2010.
- [10] H. Yousef, M. Boukallel, and K. Althoefer, “Tactile sensing for dexterous in-hand manipulation in robotics – A review,” Sens. Actuators A, Vol.167, Issue 2, pp. 171-187, 2011.
- [11] Z. Kappassov, J.-A. Corrales, and V. Perdereau, “Tactile sensing in dexterous robot hands – Review,” Robot. Auton. Syst., Vol.74, Part A, pp. 195-220, 2015.
- [12] J. Sone, Y. Matsumoto, Y. Yasuda, S. Hasegawa, and K. Yamada, “Development of MEMS Tactile Sensation Device for Haptic Robot,” J. Robot. Mechatron., Vol.32, No.2, pp. 315-322, 2020.
- [13] K. Watatani, K. Terao, F. Shimokawa, and H. Takao, “A MEMS Tactile Sensor with Fingerprint-Like Array of Contactors for High Resolution Visualization of Surface Distribution of Tactile Information,” J. Robot. Mechatron., Vol.32, No.2, pp. 305-314, 2020.
- [14] M. Muroyama, H. Hirano, C. Shao, and S. Tanaka, “Development of a Real-Time Force and Temperature Sensing System with MEMS-LSI Integrated Tactile Sensors for Next-Generation Robots,” J. Robot. Mechatron., Vol.32, No.2, pp. 323-332, 2020.
- [15] M. Shimojo and K. Koyama, “Tactile/Proximity Sensing for Robot Manipulation,” J. Soc. Instr. Cont. Eng., Vol.56, No.10, pp. 758-763, 2017 (in Japanese).
- [16] R. Araki, T. Abe, H. Noma, and M. Sohgawa, “Miniaturization and high-density arrangement of microcantilevers in proximity and tactile sensor for dexterous gripping control,” Micromachines, Vol.9, No.6, Article No.301, 2018.
- [17] M. Sohgawa, D. Hirashima, M. Moriguchi, T. Uematsu, W. Mito, T. Kanashima, and M. Okuyama, “Tactile sensor array using microcantilever with nickel – chromium alloy thin film of low temperature coefficient of resistance and its application to slippage detection,” Sens. Actuators A, Vol.186, pp. 32-37, 2012.
- [18] R. Araki, T. Abe, H. Noma, and M. Sohgawa, “Electromotive Manipulator Control by Detection of Proximity, Contact and Slipping Using MEMS Multi-Axial Tactile Sensor,” Electr. Eng. Jpn., Vol.204, Issue 2, pp. 44-49, 2018.
- [19] K. Takahashi, T. Abe, M. Okuyama, H. Noma, and M. Sohgawa, “Surface Texture Characterization Using Optical and Tactile Combined Sensor,” Sens. Mater., Vol.30, No.5, pp. 1091-1101, 2018.
- [20] T. Fujihashi, F. Suga, R. Araki, J. Kido, T. Abe, and M. Sohgawa, “Tactile Sensor with High-Density Microcantilever and Multiple PDMS Bumps for Contact Detection,” J. Robot. Mechatron., Vol.32, No.2, pp. 297-304, 2021.
- [21] R. Araki, F. Suga, T. Abe, H. Noma, and M. Sohgawa, “Gripping control of delicate and flexible object by electromotive manipulator with proximity and tactile combo MEMS sensor,” Proc. 19th Int. Conf. Solid-State Sens. Actuators Microsyst., pp. 1140-1143, 2017.
- [22] Y. Namba, T. Abe, and M. Sohgawa, “Texture evaluation for planed surface of polyoxymethylene resin by measuring surface shape and color with light and strain sensitive tactile sensor,” IEEJ Trans. Sens. Micromachines, Vol.138, No.6, pp. 250-256, 2018 (in Japanese).
- [23] Y. Abe, F. Suga, T. Abe, H. Noma, and M. Sohgawa, “Detection Area Evaluation of Tactile Sensor Using Microcantilever Embedded in Elastomer,” IEEJ Trans. Sens. Micromachines, Vol.140, No.10, pp. 272-277, 2020 (in Japanese).
- [24] H. Tachibana, S. Kamanaru, T. Mima, M. Sohgawa, T. Kanashima, M. Okuyama, K. Yamashita, M. Noda, H. Noma, and M. Higuchi, “Fabrication and Basic Characteristics of Multiaxial Tactile Sensor with 3 Cantilevers,” IEEJ Trans. Sens. Micromachines, Vol.130, No.6, pp. 223-229, 2010 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.