MAVLink: a communication protocol to send telemetry (drone positions and other things) from a drone to other drones or to the ground station.

MAVLink Communication Protocol: the open standard
read more
MAVLink: a communication protocol to send telemetry (drone positions and other things) from a drone to other drones or to the ground station.

How does Enterprise PX4 differ from PX4? What are its benefits, and why did we create it in the first place?
The shift towards open source development is no longer exclusive to IT companies, but is permeating across nearly every industry today. Open source technologies are dramatically changing how products and services are developed and delivered, which is positively...

Auterion was the main sponsor this year and contributed presentations from ten Auterion engineers
Auterion, with over 51% of contributions is leading the charge in the progress of PX4.

To ensure the robustness and security of PX4, and the whole ecosystem around MAVLink, we applied fuzz testing against the MAVLink library.

On June 20 – 21 2019, the first-ever PX4 Developer Summit took place at ETH Zurich. Over 200 developers flew from all over the world to meet the largest drone community in the world.
Open standards and open source are the foundation of modern software development – including the Internet. However, the Internet did not happen by itself.
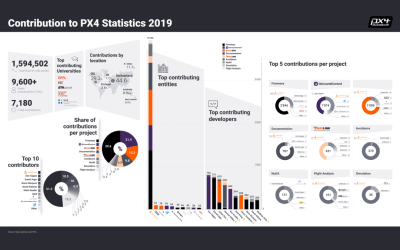
In 2018 Auterion was responsible for at least one-third of the total contributions to the PX4 ecosystem. Have a read at the technology improvements that Auterion brought to the community.
A decade ago, little did I know that my student project at the Computer Vision and Geometry Lab at ETH Zurich would end up becoming the standards for the drone industry.