
Southwest Research Institute (SwRI) uses the Robot Operating System (ROS) as an enabling technology to develop complex intelligent systems. ROS is an open-source project that provides a common framework that can be leveraged for industrial applications. ROS has enabled SwRI to deliver technologically complex or previously infeasible systems at a lower cost and in a shorter development time. SwRI has leveraged this technology to develop and deploy automation solutions for processes such as sanding, painting, grinding, food processing, inspection, ink jet printing, bin picking and more.
ROS Software & Integration Solutions
SwRI-developed intelligent systems leverage a breadth of ROS software, robotics hardware and machine vision tools such as perception, segmentation, calibration, collision detection, tool path generation, motion planning and more. SwRI has expertise in developing and deploying unique industrial automation solutions in a variety of industries leveraging our capabilities. Our capabilities deployed include the following systems:
ROS software enables robotic perception with 2D and 3D cameras.
Perception – We leverage a wide range of 2D cameras and 3D sensors to perform classification, surface reconstruction, object recognition, collision environment construction, collision avoidance and other tasks.
Segmentation – These tools support meshes and point cloud data to identify different objects, surfaces, interior and exterior edges along with identify features within an object or surface, including edges and holes.
Calibration – We perform calibration of various robotics systems such as path planning using traditional code and no-code, or machine vision-based programming.
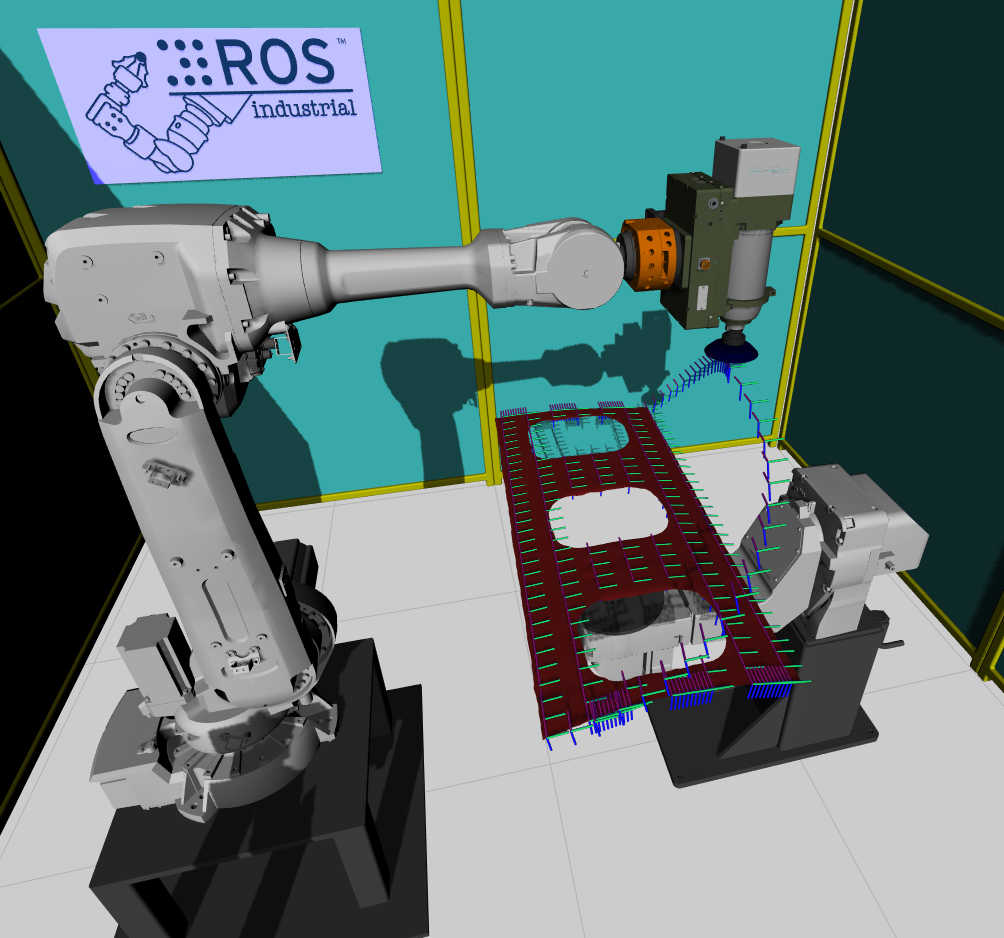
Tool Path Generation - We have developed tools that support meshes and point cloud data that can produce surface tool paths that follow the subject’s contour with user defined point and line spacing. In addition, we are able produce paths on both interior and exterior edges.
Motion Planning - We have developed motion planning capabilities for both Cartesian and Free-space to generate collision-free trajectories with the ability to introduce process constraints to further restrict the trajectory generated. This includes the glass-upright free-space planning problem in which a robot is moving a glass from one point to another, but the orientation is constrained such that it must stay upright to avoid spilling but the Cartesian position is free to move anywhere during path to its goal location.
Process Planning – Most applications consist of both Free-space and Cartesian requirements along with each having a different set of motion and way-point constraints. Each of these presents different motion planning challenges where certain motion planners thrive better than others. SwRI has experience developing custom process planners to solve complex process planning problems and can use the state-of-the-art for both free-space and constrained process planning.
Meta Planning – Standard approaches to process planning imposes artificial constraints by considering only the nominal tool path without accounting for any flexibility that the process may offer. As a result, process plans may fail due to the inclusion of unreachable way-points or segments, and those that do not fail can include costly reconfiguration moves, which negatively impact process quality. SwRI's Meta Planner provides a high-level process-aware planning framework capable of exploiting flexible process constraints, enabling it to produce process plans for previously infeasible tool paths and generate more optimal motion plans with a higher rate of success.
Hardware Drivers – Not all hardware works out of the box with all systems. SwRI has created a library of hardware drivers enabling use of multiple brands together as needed. The team also has the ability to create new hardware drivers to enable communication of devices with each other.

Intelligent Systems Insights Blog
Read the latest articles about robotics engineering, manufacturing technologies and automation solutions at SwRI’s Intelligent Systems Insights Blog.
Visit Robot BlogROS-Industrial Research
SwRI leverages ROS-Industrial, an open-source consortium, for research that advances robotics applications for manufacturing and industry.
- Autonomous Vehicle Research & Testing
- Industrial Robotics & Automation
- Robotics Research & Development
- ROS-Industrial Consortium
- Robot Operating System (ROS)
Visit rosindustrial.org to learn more about events and consortia in the Americas, Europe and Asia-Pacific.