

Abstract
Researchers routinely infer learning and other unobservable psychological functions based on observable behavior. But what behavioral changes constitute evidence of learning? The standard approach is to infer learning based on a single behavior across individuals, including assumptions about the direction and magnitude of change (e.g. everyone should avoid falling repeatedly on a treacherous obstacle). Here we illustrate the benefits of an alternative “multi-expression, relativist, agnostic, individualized” approach. We assessed infant learning from falling based on multiple behaviors relative to each individual’s baseline, agnostic about the direction and magnitude of behavioral change. We tested infants longitudinally (10.5–15 months of age) over the transition from crawling to walking. At each session, infants were repeatedly encouraged to crawl or walk over a fall-inducing foam pit interspersed with no-fall baseline trials on a rigid platform. Our approach revealed two learning profiles. Like adults in previous work, “pit-avoid” infants consistently avoided falling. In contrast, “pit-go” infants fell repeatedly across trials and sessions. However, individualized comparisons to baseline across multiple locomotor, exploratory, and social-emotional behaviors showed that pit-go infants also learned at every session. But they treated falling as an unimpactful “pratfall” rather than an aversive “pitfall.” Pit-avoid infants displayed enhanced learning across sessions and partial transfer of learning from crawling to walking, whereas pit-go infants displayed neither. Thus, reliance on a predetermined, “one-size-fits-all” behavioral expression of a psychological function can obscure different behavioral profiles and lead to erroneous inferences.
Keywords: individual differences, associative learning, falling, crawling, walking
Alternatives to a “One-Size-Fits-All” Approach to Infer Learning
Researchers frequently rely on observable behaviors to infer unobservable psychological functions such as learning. For nonverbal subjects such as infants and animals, learning is typically inferred based on changes in behaviors. But what behavioral changes should count as evidence of learning? A common approach is to rely on a single, predetermined behavior with a prespecified direction and magnitude of change, often on a single trial per condition. For example, in infancy research, avoidance of a treacherous obstacle (Gibson & Walk, 1960), increased looking at a “surprising” event (Wynn, 1992), reaching to a morally “good” agent (Hamlin et al., 2007), and so on constitute evidence of learning or knowledge. However, if infants express learning in unexpected ways or display individual differences in their behavioral expression of learning, the standard “one-size-fits-all” approach risks painting an erroneous picture of infant learning.
Here, we suggest an alternative, more agnostic approach. Rather than relying on a single behavior on a single trial, researchers can consider a suite of behaviors (suggested by prior work and/or arising in the task) across multiple trials. Rather than presuming the direction and magnitude of change, researchers can compare each behavior on test trials to responses on baseline trials. The resulting behavioral profiles for each participant may yield insights not revealed by the standard approach (or minimally, provide converging evidence for the primary outcome variable). Aspects of this alternative approach were inspired by previous work that used multiple measures (LoBue et al., 2020), comparisons to baselines (Rovee-Collier & Cuevas, 2009), or individual differences (Perez-Edgar et al., 2020). But here we show that it is possible and profitable to do all of it at once while remaining as agnostic as possible to infer evidence of learning. The current study used infant locomotion—specifically, learning from falling—to illustrate the benefits of this “multi-expression, relativist, agnostic, individualized” approach.
Slippery Surfaces and Foam Pits
If you slipped and fell after stepping onto an unexpectedly slippery patch of ground, would you stand up and walk onto it again? Or if you lost balance and fell after stepping into an unexpectedly squishy foam pit, would you stand up and do it again? In both cases, adults would not. But many infants would. That is, adults show one-trial learning. But infants avoid falling only after repeated encounters or never avoid falling at all, suggesting that babies may be at greater risk of injury.
After an unexpected slip in a specific location, adults avoid stepping onto the same slippery ground or modify their movements to prevent slipping on subsequent encounters (Chambers et al., 2013; Pavol et al., 2004). Infants, however, continue to walk and fall (Adolph et al., 2010). After stepping onto a visually distinct, Teflon surface that caused them to slip and fall backward, 100% of 15-month-olds attempted to walk across the same surface moments later, and 40% slipped and fell on 16 consecutive trials.
Encounters with a visually distinct, fall-inducing foam pit revealed similar results (Joh & Adolph, 2006): On their first trial, every infant and adult stepped straight into the foam pit and fell. Babies landed face first, and many adult participants shrieked in surprise. On subsequent trials, adults avoided falling by carefully stepping onto the foam or leaping over the pit. Infants, however, continued to walk and fall—belly-flopping on trial after trial: 89% of 15-month-olds fell on their second encounter with the foam pit, 56% fell on 3 to 14 trials, and 20% fell 16 times in a row.
Findings from slippery and squishy surfaces raise two important questions: Why do people of every age, from infants to older adults, fall on their first encounter? And why do so many infants continue to walk and fall, whereas adults do not? Indeed, avoidance of future falls is adults’ prominent response after falling on a treacherous obstacle, and accordingly avoidance has been the primary index of infant learning since the classic “visual cliff” studies (for review, see Adolph et al., 2021; Gibson & Walk, 1960). But do infants who fall repeatedly really not learn from falling? This question is important because it pertains to whether infants can quickly associate visual cues with action consequences in a context where the consequences are tangible and potentially injurious.
Falling on the first encounter
People fall on their first encounter with a novel slippery or squishy surface because they cannot anticipate threats to balance as they approach the obstacle. Why not? In everyday parlance, we refer to friction and rigidity as properties of the ground surface (e.g., ice is “slippery,” foam is “squishy”), but everyday parlance is technically incorrect. Friction and rigidity are emergent properties. Resistive forces come into existence only when two surfaces (e.g., foot and floor) come into contact in particular ways (Joh et al., 2006; Joh et al., 2007). If the speed is slow and the foot lands flat with the body nearly vertical, then the forces can be sufficient to prevent falling. However, such visually-guided, prospective gait modifications require walkers to anticipate threats to balance as they approach the surface from a distance (Adolph & Joh, 2009; Cham & Redfern, 2002).
Because friction and rigidity are emergent properties, the consequences for locomotion are not visually perceptible prior to the first contact. Although novel instantiations of slippery or squishy surfaces might be visually distinct from the surrounds, visual features such as color, texture, shine, and rounded edges are arbitrary and do not alert walkers to upcoming fall risks on the first encounter (e.g., Joh et al., 2006). Thus, people are likely to fall. On subsequent encounters, people must learn from the first fall and associate visual cues for the surface with the consequences for balance and locomotion. Of course, tactile and proprioceptive information from touching a slippery or squishy surface yields the requisite information: When touching was ensured by seating walking infants on a low bench with their feet touching the edge of a squishy waterbed, none attempted to walk (Gibson et al., 1987). However, while walking, people must be alerted to stop ongoing locomotion in order to touch.
Notably, in contrast to emergent forces such as friction and rigidity, people can see novel changes in the depth of the ground surface (Adolph & Joh, 2009). Visual depth cues reliably specify changes in elevation, slant, and extent from a distance—even for unfamiliar obstacles such as a “visual cliff” (Gibson & Walk, 1960). You can see a novel drop-off, slope, or narrowing of the path before you step onto it. Visual depth cues elicit a sequence of visual-to-tactile information-generating behaviors; infants (like adults) modify their gait during approach to engage in tactile/proprioceptive exploration of the obstacle (Kretch & Adolph, 2017). Thus, many experienced crawling and walking infants avoid falling on impossibly large drop-offs, steep slopes, narrow bridges and ledges, and so on from the first risky trial (for reviews, see Adolph & Hoch, 2019; Adolph et al., 2021).
Falling on subsequent encounters
Why do so many infants fall repeatedly into a foam pit or on a Teflon surface on consecutive trials, whereas adults show one-trial learning? One possibility is that repeated fallers do not quickly associate the look of the offending ground surface with the consequences for balance and locomotion. The problem is not a deficit in associative learning because even young infants can form rapid cue-consequence associations in tasks that do not involve balance and locomotion: For example, infants cause an overhead mobile to jiggle by associating the look of the mobile elements or crib bumpers with the consequence of kicking their legs (Bhatt & Rovee-Collier, 1996; Rovee-Collier et al., 1985).
Instead, falling may be a special case of “learned irrelevance” (Aberg et al., 2020; Adolph & Joh, 2009; Bonardi & Ong, 2003), where infants learn to ignore visual cues (e.g., color of carpet) because they are not typically correlated with falls. At early stages of locomotion, falling is so frequent and the causes are so variable that infants may not attribute falls to changes in the environment (Han et al., 2021). In fact, most infant falls result from poor balance during steady-state locomotion (e.g., arms or legs collapse), poor proactive planning (e.g., fall due to turning the head, lifting an arm, changing direction), or poor execution (e.g., trip over their own feet). Only a small proportion of falls are related to variations in the ground surface. Thus, if infants quickly associated the look of the ground surface with falling, they would never move at all.
A second possibility is that infants do quickly associate visual cues for the ground surface with falling, but they are not motivated to avoid falling. Although infant falls are noticeable, most are trivial. Babies rarely fuss or cry after falling, and they return to normal levels of activity within a few seconds (Han & Adolph, 2021). Indeed, infants are “built” to fall. They are short, lightweight, and move slowly. Therefore, infant falls generate 18 times less impact energy compared to adult falls. Moreover, infants’ bodies are robust to the residual impact energy due to “baby fat” (Butte et al., 2000) and malleable bones (Currey, 1979). Thus, although adults are highly motivated to avoid falling (Pavol et al., 2002), infants may not care. More generally, infants must be motivated to demonstrate learning. If not sufficiently motivated by the consequences, researchers are left to assume the null hypothesis.
Learned irrelevance and lack of motivation are not mutually exclusive possibilities: Infants might be slow to learn the association, and in addition, might not care about the consequences. After falling in free play, infants do not decrease their frequency of locomotion or avoid the objects or locations implicated in their falls (Han & Adolph, 2021). Infants return to the same object or location and fall over and over again within a short play session (e.g., one infant fell 15 times in 20 minutes while playing with a stroller). However, naturalistic studies of falling in free play cannot reveal whether infants were slow to learn the association, or quickly learned but did not care.
Do Repeated Fallers Learn Anything at All? Current Study
Here, we used a multi-expression, relativist, agnostic, individualized approach to test cue-consequence associative learning from falling when navigating a deformable surface. We encouraged infants to crawl or walk repeatedly over a squishy, fall-inducing foam pit. To understand the time course of learning, we observed infants longitudinally over seven sessions, starting at 10.5 months of age when infants were crawlers and ending at 15 months of age when infants were walkers (like the 15-month-old walkers in Joh & Adolph, 2006). Ours is among the handful of studies to investigate infant locomotion on deformable or slippery surfaces (Adolph et al., 2010; Gibson et al., 1987; Joh & Adolph, 2006) and among the few to test transfer of learning longitudinally over the transition from crawling to walking (Adolph, 1997; Burnay & Cordovil, 2016; Burnay et al., 2021).
As in Joh & Adolph (2006), we encouraged infants to cross a raised walkway that was rigid wood on “baseline” trials and interrupted by a visually distinct, squishy foam-pit on “test” trials (Figure 1, top panel). The location of the “focal area” was the same for baseline and test trials to allow comparisons between the two types of trials. We interspersed baseline trials across the session to ensure that infants were still “in the game”, to provide a point of comparison, and to distinguish location-learning (same in both types of trials) from cue-consequence learning (differed between the two types of trials). Like all deformable and slippery surfaces, the foam pit was novel on infants’ first encounter. As in previous work, the foam pit reliably induced a fall if infants attempted to crawl or walk. Thus, we expected infants to fall on their first encounter. The question was whether infants showed learning on subsequent encounters.
Figure 1.
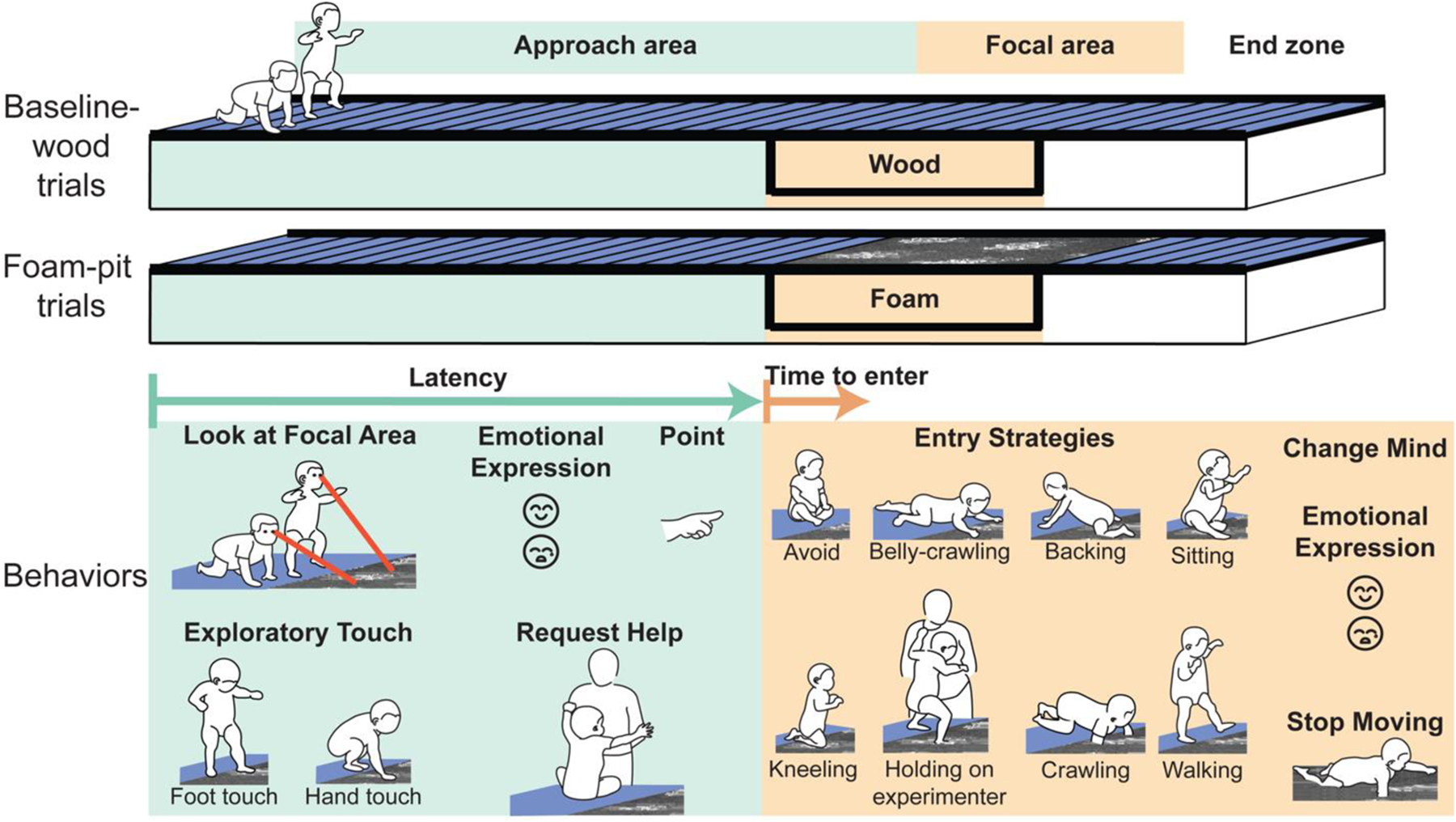
Apparatus and Behavioral Codes
Note. Top and middle panels: Raised walkway for baseline-wood and foam-pit trials, respectively. The walkway was divided into an approach area (green), focal area (orange), and end zone (white). On baseline trials, the entire walkway was solid wood and covered with blue vinyl. On foam-pit trials, wood blocks in the focal area were replaced by soft foam blocks to create a foam pit. The foam pit was covered with brown, flowered cloth and was visually distinct from the rest of the walkway. Bottom panel: Codes for behaviors in the approach area (green) and focal area (orange).
What constituted evidence of learning? Behaviors were selected based on prior work on infant navigation over obstacles and careful viewing of video recordings of the sessions—with every attempt to remain agnostic about what infants should do. We used avoidance, the classic index of learning in prior work. But in addition, we used multiple locomotor, exploratory, and social-emotional behaviors to allow for different expressions of learning in different combinations of behaviors across infants and sessions (LoBue et al., 2020). The suite of possible behaviors spanned the entire trial—as infants approached the focal area, at the edge of the focal area, and as infants crossed the focal area (Figure 1, bottom panel).
Rather than assuming the direction or magnitude of change, we compared foam-pit to baseline trials (Figure 2, orange and blue lines). We tested the entire suite of behaviors for each infant in each session and considered evidence of learning to be any difference between that baby’s foam-pit and baseline trials. Thus, a fussy baby on baseline trials had to be even fussier (or happier) on foam-pit trials; a slow baby at baseline had to become even slower (or speed up) on foam-pit trials; and so on. Each outcome variable was agnostic about the direction of behavioral change (e.g., avoid rather than go; produce negative rather than positive emotional expressions). In fact, our approach accounted for the possibility that some infants would enjoy falling into the foam pit (which would also constitute evidence of learning), like the 3-year-olds who deliberately “dove” or “cannonballed” into a foam pit in previous work (Joh & Adolph, 2006). Thus, rather than a group average on a single trial, we observed multiple trials across multiple sessions to identify each infant’s behavioral profile, including the direction and magnitude of behavioral change. As shown in Figure 2, we tested learning within, between, and across sessions, and whether learning transferred from crawling to walking.
Figure 2.

Study Design and Analysis Plan
Note. Top panel: Longitudinal testing over 7 sessions. Infants were crawlers in session 1 and had begun walking by session 7; the transitional session varied among infants. Bottom panel: Sequence of baseline-wood trials (blue lines) interleaved with foam-pit trials (orange lines) within each session. Y-axis shows the number of planned foam-pit trials. Asterisks denote test of within-session learning (comparison between first and last foam-pit trials, but note that some infants contributed fewer than 16 trials in the session). Vertical gray arrows denote test of between-session learning (comparison between last foam-pit trial of previous session and first foam-pit trial of current session). Horizontal gray arrow denotes test of across-session learning (comparison between foam-pit and baseline trials in all sessions). Horizontal gray brackets denote tests of transfer from crawling to walking (first crawling session to first walking session and last crawling session to first walking session).
Within-session Learning
To test learning within sessions, we compared infants’ behavior in their first foam-pit trial to their last foam-pit trial in that session (Figure 2, asterisks), regardless of whether the session terminated prior to all the planned foam-pit trials. If infants learn across trials, their behavior should be exaggerated in the last foam-pit trial.
Between- and Across-session Learning
To test retention between consecutive sessions, we compared each infant’s behavior on the last foam-pit trial in the previous session (regardless of whether they completed all planned foam-pit trials) to the first foam-pit trial in the current session (Figure 2, gray vertical arrows). If learning is fully retained across sessions, then behavior should be similar. But if infants require a “reminder” about the foam pit, then their initial behavior in the current session should be less pronounced. To test learning across all seven sessions, we tested whether behavioral changes increased in magnitude (Figure 2, gray horizontal arrow).
Transfer of Learning from Crawling to Walking
To test transfer from crawling to walking, we compared infants’ last crawling session to their first walking session (Figure 2, short gray bracket). If cue-consequence learning fully transfers as hypothesized by Adolph and Joh (2009), infants should show no decrease in learning across the two sessions. We also compared infants’ first walking session to their first crawling session (Figure 2, long gray bracket). If learning transfers, then infants should show increased responding in their first walking session compared to their first crawling session.
Method
Transparency and Openness
Data were collected in 2003–2005 as part of the third author’s dissertation, but the data were never submitted for publication, and the study was not preregistered. The video coding, analyses, and conceptual framing presented here were conducted in 2020–2022. We did not originally request permission to share the video data. However, we tracked down 2 families who consented to share their videos (databrary.org/volume/1185). We publicly shared de-identified coding spreadsheets and processed data from every infant, the coding manual, coding scripts, and analysis scripts at databrary.org/volume/1185/slot/58325. We also publicly shared video clips illustrating the procedure and codes (databrary.org/volume/1185/slot/58328).
Participants and Longitudinal Design
Thirty-one families were recruited from the New York City area and received digital photographs as souvenirs of participation. All infants were healthy and term. Parents reported infants’ sex as boy or girl and selected one of the following options as infants’ race and ethnicity: White (58.06%), Black (6.45%), Asian (3.23%), Hispanic (16.13%), multiracial (9.68%), or not reported (6.45%). All study procedures were approved by the Committee on Activities Involving Human Subjects at New York University and caregivers consented to participation prior to inclusion in the study.
We tested infants longitudinally every three weeks, from 10.5 months of age when all were crawlers to 15 months after infants had begun walking, for seven sessions in total. We tried to schedule sessions ±1 week of the intended test age, but occasionally tested infants a few days earlier or later due to holidays, illness, and so on. Twenty-one infants (10 girls, 11 boys) in a full-data group contributed complete data to at least 5 sessions, and 17 showed up for every session; 10 additional infants (4 girls, 6 boys) in a partial-data group contributed complete data to ≤ 3 sessions, and 7 stopped participation before the midway session (Figure A1). The full-data group had complete data for 133 sessions and incomplete data at 3 sessions (due to infant fussiness or fatigue); 5 sessions were entirely missing due to parent cancelations; at 6 sessions, families showed up, but infants refused to crawl or walk on initial baseline trials, so they did not enter the study, and those sessions had no useable data. The partial-data group had complete data for 10 sessions, and incomplete data for 7 sessions; at 9 sessions, infants refused to crawl/walk on baseline trials. Although the full-data group were the focus of our primary analyses, we also examined the partial-data group to understand the high attrition rate, but we analyzed their data separately.
Caregivers reported infants’ age at crawl onset retrospectively based on the first day they saw infants crawl 3m on hands and knees without stopping or falling. We tracked walk onset prospectively based on lab observations. At the session when caregivers reported infants had begun walking, we encouraged infants to walk over the length of the solid walkway. If infants walked two times, we considered them “walkers” and started each trial in a standing position. We estimated infants’ walk onset as the midpoint between their last crawling session and their first walking session. For the full-data group, crawl onset ages ranged from 7.43–10.75 months (M = 8.86 months); crawl onset ages for 2 infants were missing because parents were unsure. At the first test session, 20 infants crawled on hands and knees and 1 belly crawled. Walk onset ages ranged from 10.78–14.73 months (M = 12.74 months); 1 infant did not walk by the last 15-month session. Infants had M = 3.4 sessions as crawlers and M = 3.3 sessions as walkers.
At the first session, caregivers reported whether infants had ever experienced a notable fall (left a mark; instigated call or visit to doctor). At every session, caregivers reported infants’ weekly experience locomoting or playing on deformable surfaces (bed mattress, couch cushions, foam mats, sand, etc.). In the full-data group, 6 infants experienced notable falls; all had weekly experience with squishy surfaces. Full- and partial-data groups showed no differences in crawl and walk onset ages, notable falls, and squishy-surface experience, ts < 1.68, ps > .11.
Foam-pit Apparatus
As shown in Figure 1, we encouraged infants to locomote over a raised wooden walkway (488 cm long × 97 cm wide × 58 cm high); see video of apparatus and exemplar study trials at databrary.org/volume/1185/slot/58328. The walkway was divided into a 275-cm long “approach area,” a 122-cm long “focal area,” and a 91-cm long “end zone.” On baseline-wood trials, the entire walkway was covered with blue vinyl striped every 15.24 cm to provide a distance metric visible on video (Figure 1, top panel). On foam-pit trials, we replaced wood blocks in the focal area with soft foam blocks to create a 38-cm deep foam pit (Figure 1, middle panel). To make the foam pit visually distinct from the blue vinyl, the foam blocks were covered with brown, flowered cloth.
Procedure
Each session began with 4 baseline trials to acclimate infants to crossing the walkway and as a criterion to enter the study. Then, the experimenter presented blocks of 4 foam-pit trials interspersed with 2 baseline trials until infants received 16 foam-pit trials (Figure 2, orange and blue lines) or refused to crawl or walk on 3 consecutive foam-pit trials within a trial block. The latter stopping criterion was designed to prevent infants from becoming upset. Trials ended after infants entered the foam pit, detoured off the walkway, or 30s elapsed, whichever occurred first. An experimenter followed alongside infants to ensure their safety on the raised walkway, but did not spot infants if they fell into the foam pit because the foam prevented injury. Caregivers and an assistant stood at the far side of the end zone and encouraged infants to cross, offering toys and snacks as incentives, but did not call infants’ attention to the foam pit or instruct them how to locomote.
A third assistant panned a camera perpendicular to the walkway to record infants’ whole-body movements. A fourth assistant recorded infants’ face from the far side of the end zone. The two camera views were mixed into a single video frame for ease of later coding (databrary.org/volume/1185/slot/58328).
Video Coding
For each trial, coders identified infants’ behaviors using Datavyu (www.datavyu.org) software that time locks user-defined codes to the relevant video frames. In addition to avoidance—the classic index of wariness—coders scored multiple locomotor, exploratory, and social-emotional behaviors in the approach and focal areas of the walkway using the same criteria for baseline and foam-pit trials to allow comparisons between the two types of trials (Figure 1). See video exemplars of each code at databrary.org/volume/1185/slot/58328.
Behaviors in the Approach Area
Several behaviors reflected infants’ awareness of impending consequences for locomotion as they approached the focal area (Figure 1, green box). Latency began on the video frame when the experimenter released infants on the walkway and ended on the video frame when any body part crossed into the focal area, infants tried to detour off the walkway, or after 30s had elapsed, whichever occurred first. Infants could gather information about the focal area by looking (down at focal area—scored as 1 or 0) and touching (accumulated duration of pressing, patting, rubbing hands/feet on focal area without moving forward). Infants’ emotional expressions were positive (smiling, giggling, or laughing—scored as 1), negative (frowning, fussing, or crying—scored as −1); or neutral (scored as 0). In the rare event that infants showed both positive and negative expressions, coders selected the one with the longer duration. Social communications were pointing (extending one or two fingers toward focal area or end zone—scored as 1 or 0) or requests for help (turning to experimenter with extended arms or clinging to experimenter—scored as 1 or 0).
Behaviors in the Focal Area Before and After Entry
Several behaviors reflected the form and speed of locomotion in the focal area and social-emotional responses after entry (Figure 1, orange box). Avoidance occurred if infants refused to enter the focal area for 30s or tried to detour off the walkway. Alternative postures were belly-crawling (entered focal area with belly on ground), backing (scooted backward feet first), sitting (scooted on buttocks), kneeling (moved on knees), holding (clung to experimenter while walking into focal area), and crawling (for walkers). Note: Although coders scored entering the focal area in infants’ original crawling or walking posture, this information is redundant because it is the reciprocal of trials with avoidance plus alternative postures, so we did not report it here. Coders identified time to enter (starting when infants crossed edge of focal area and ending when their weight was fully supported on focal area). Coders scored the number of times that infants changed-mind when babies partially entered the focal area and then retreated back to the approach area, regardless of whether they ultimately avoided or crossed. Post-entry emotional expressions (after entering focal area) were coded as in the approach area, and stopped moving were trials when infants entered the focal area but did not take steps toward the end zone (scored as 1 or 0).
Inter-observer Reliability
To assess inter-observer reliability, a second coder independently coded 25% of each infant’s trials. For categorical variables, percent agreement ranged from 89.61% to 99.55%, M = 96.74%; Cohen’s κ = .77 to .98, M = .91. Continuous variables were highly correlated, rs = .93–1.0, ps < .001. To avoid coding drift, after every few sessions, the two coders met to discuss disagreements. Although disagreements were rare, we were loath to propagate known errors into the final analyses. Thus, differences that resulted from typos and other careless errors were resolved according to the accurate code; for differences that reflected true disagreements (e.g., one coder saw a smile, but the other did not), the primary coder’s data were retained for final analyses.
Results
Our primary analyses focused on behavioral change on foam-pit relative to baseline trials in the 133 complete sessions in the full-data group; however, including the 3 incomplete sessions did not change the pattern of results. Preliminary analyses showed no sex differences, ps > .10, so we combined boys and girls in later analyses. We used Generalized Estimation Equations (GEEs) to account for repeated, longitudinal observations, and we specified the correlation structure as exchangeable (Hardin & Hilbe, 2003). See Appendix B for GEE model specification, model effects, parameter estimates (i.e. effect sizes), and confidence intervals.
All Infants Went Straight Over the Walkway on Baseline-wood Trials
On baseline trials, infants went straight over the walkway. They were happy or neutral in the approach area (97.9% of baseline trials). They rarely pointed (2.8%), requested help (0.4%), touched (0%), looked at the focal area (9.1%), or changed their mind about entry (0%). Infants rarely avoided the focal area (1.5%) and never used alternative postures (0%). They moved quickly, taking only M = 6.14s (SD = 4.85) to traverse the approach area and M = 382ms (SD = 341) to enter the focal area. Latency did not differ between the first and last baseline trials, Wald χ2 = 1.88, p = .17, indicating that infants did not become fatigued or disinterested in crossing the rigid walkway. Infants continued to move through the end zone after entry (99.9%) and continued to display positive or neutral emotional expressions (98.2%). Baseline behaviors did not change across sessions, Wald χ2s < 2.65, ps > .10; however, due to increased locomotor speed across sessions (as crawling and walking skill improved), latency tended to decrease, Wald χ2 = 3.47, p = .06, and time to enter decreased, Wald χ2 = 26.54, p < .001.
Infants Fell on Their First Encounter with the Foam Pit
We considered the possibility that crawlers might avoid falling on their first encounter due to serendipitous touching while using their hands to locomote. But they did not. Only 1 crawler touched the foam pit while crawling and then refused to enter (Figure A2). Twenty crawlers fell on their first foam-pit trial; of these, 3 fell headfirst into the foam pit with their knees still on the wooden part of the platform, then scooted backward onto the approach area, and ultimately avoided. Thus, all but 1 infant had something to learn on subsequent encounters.
Some Infants Consistently Avoided the Foam Pit, but Others Did Not
Compared to the uniform responses on baseline trials, foam-pit trials presented dramatic behavioral differences. Within sessions, some infants avoided on every trial (Figure 3A, top symbols), some never avoided (Figure 3A, bottom symbols), and some avoided sporadically. Figure 3B shows relative avoidance (infants’ average avoidance on foam-pit trials minus their average avoidance on baseline trials). Across sessions, 12 infants consistently showed high relative avoidance (M range = 57.14–100%), and 9 infants did not (M range = 0–26.23%); these groups were non-overlapping. We named the two groups “pit-avoid” (red symbols) and “pit-go” (green symbols). Across sessions, pit-avoid infants avoided more than pit-go infants, M = 77.18%, SD = 31.57% and M = 11.96%, SD = 25.16%, respectively, Wald χ2 = 139.23, p < .001. Pooled across foam-pit trials, pit-avoid infants crawled on only 35.5% of crawling trials and walked on only 27.7% of walking trials; pit-go infants crawled on 86.9% of crawling trials and walked on 75.4% of walking trials. Trial-by-trial avoidance behavior further confirmed the group difference (Figure A2). Infants displayed striking consistency in their avoidance behavior: Pit-avoid infants consistently avoided the foam pit within and across sessions and across crawling and walking sessions whereas pit-go infants rarely avoided.
Figure 3.
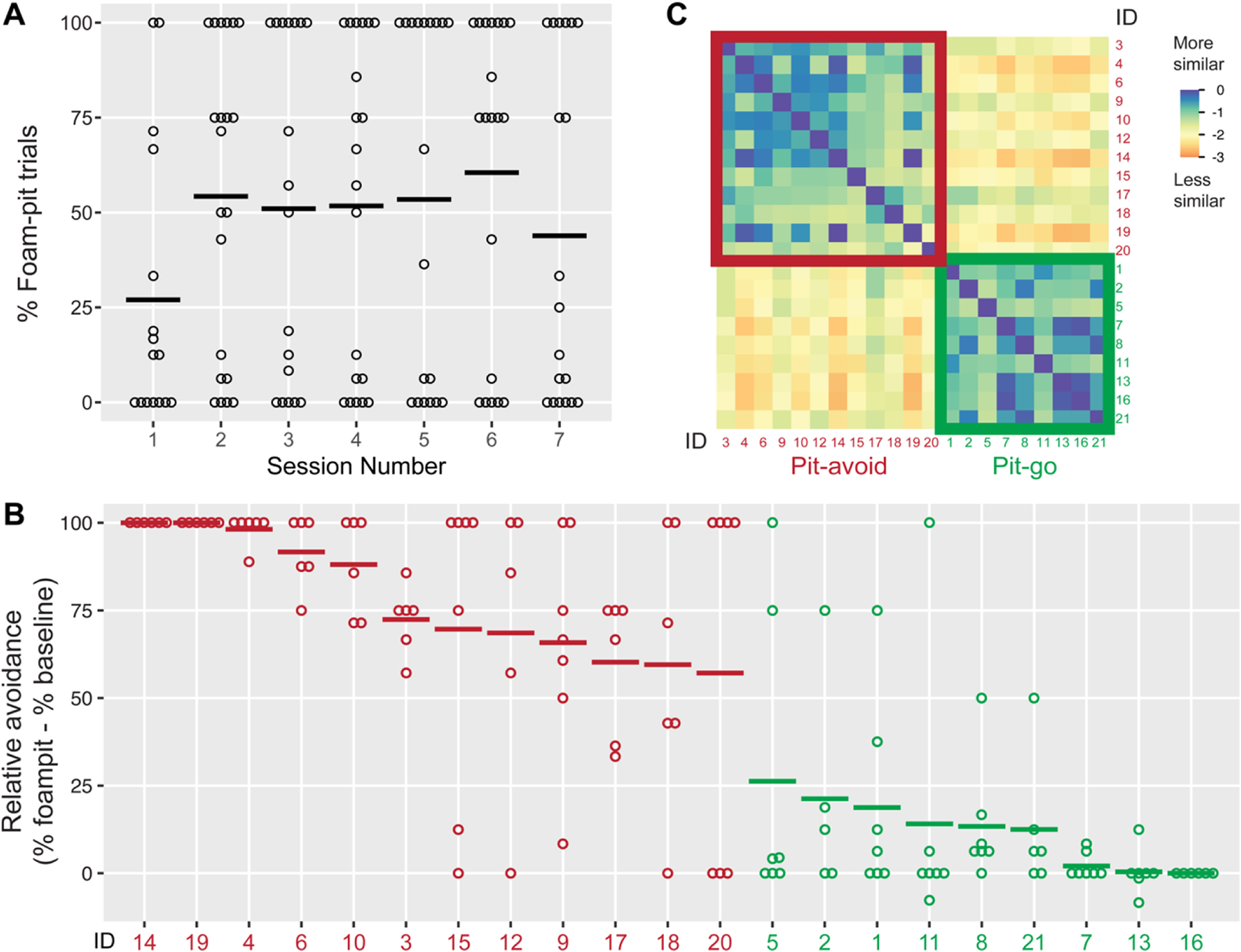
“Pit-avoid” and “Pit-go” Groups Based on Avoidance Behavior
Note. (A) Percent avoidance in foam-pit trials from sessions 1 to 7 for all infants. Each symbol represents one infant’s data in one session. Horizontal lines denote sample means. (B) Relative avoidance between foam-pit and baseline trials (percent of avoidance in foam-pit trials minus percent of avoidance in baseline-wood trials). Zero on the y-axis indicates no difference. Each symbol denotes one infant’s data in one session; x-axis shows infants’ ID numbers. Horizontal lines denote each infant’s mean across sessions. Infants were grouped into pit-avoid (in red) and pit-go (in green) groups based on their relative avoidance. (C) Similarity matrix among all 21 infants based on their relative avoidance across 7 sessions. Similarity was calculated as the inverse of the Euclidean distance among infants. Each square represents the similarity between two infants; ID numbers are listed on the right and bottom side of the matrix. Darker colors denote higher similarity between two infants and lighter colors denote lower similarity. Red and green boxes show the two groups that emerged in the longitudinal k-means clustering, which were the same as the pit-avoid and pit-go groups formed in B.
To objectively test whether two patterns of avoidance best characterize the data, we used longitudinal k-means (Genolini & Falissard, 2010) to cluster infants based on relative avoidance across sessions. We used the Caliński-Harabasz (CH) index (Caliński & Harabasz, 1974) to determine the optimal number of clusters (Figure A3). The CH index showed that 2 groups was optimal and ruled out the possibility of sub-groups (e.g., faster and slower learners across sessions). The cluster analysis put each infant into the same group as in Figure 3B. Figure 3C shows the high similarity among infants within each group. Crawl and walk onset ages, notable falls, and experience with squishy surfaces did not predict group membership, ps > .12.
Both Pit-avoid and Pit-go Infants Learned About the Foam Pit
Lack of avoidance in pit-go infants does not necessarily reflect failure to learn about the foam pit. With no a priori assumptions about how infants should respond, we found that every infant in both groups showed behavioral changes on foam-pit compared to baseline trials.
For some variables, pit-avoid and pit-go infants showed similar levels of discriminative behaviors to the foam pit. Compared to baseline, both pit-avoid and pit-go infants looked more often (Figure 4B), changed their minds more frequently (Figure 4I), and took longer to enter the focal area (Figure 4J), Wald χ2 s > 10.63, ps < .001, with no interaction between condition and group, Wald χ2s < 1.08, ps > .30.
Figure 4.
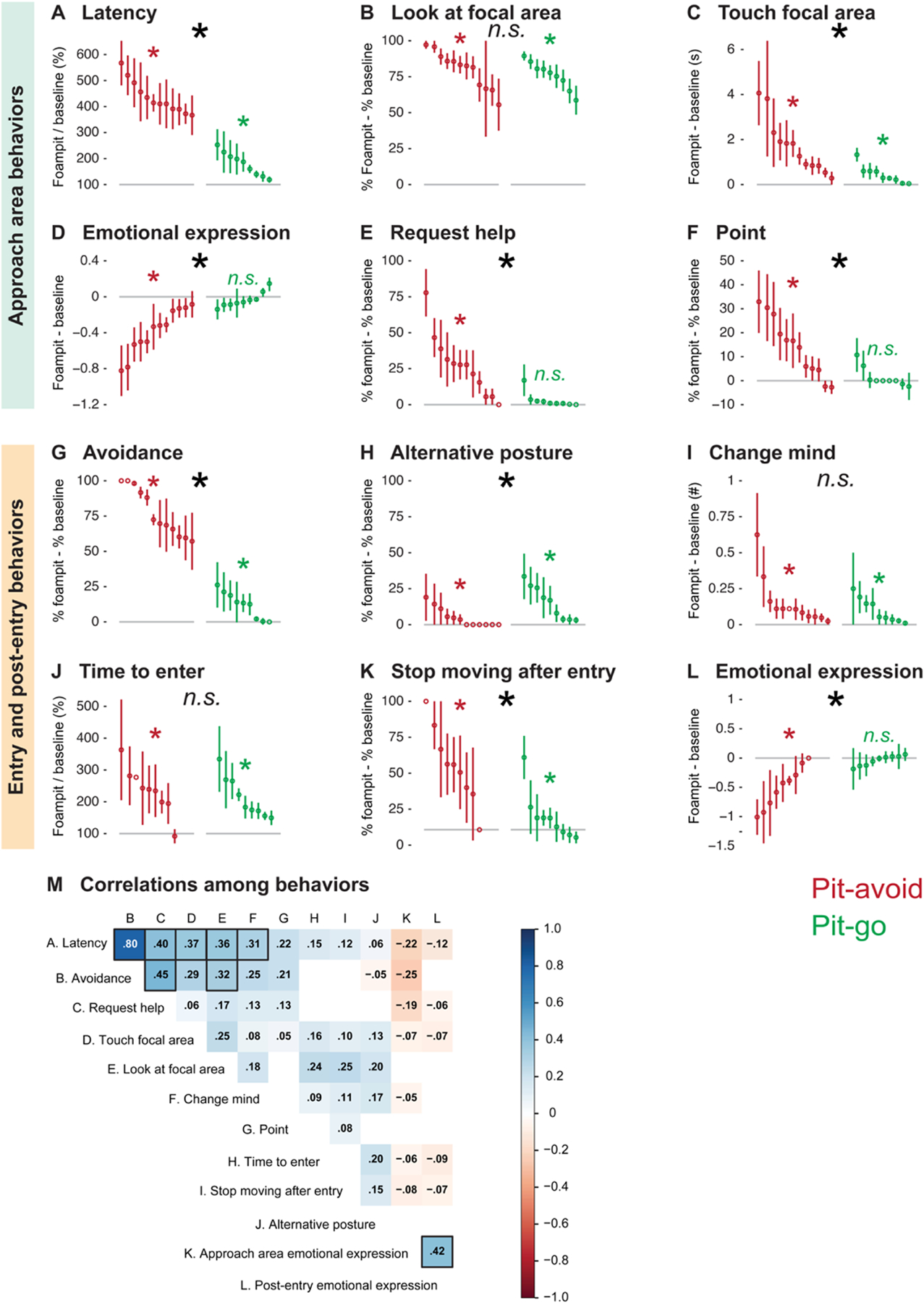
Relative Variables Between Foam-Pit and Baseline Trials for Pit-avoid and Pit-go Infants
Note. (A-F) Approach area behaviors, (G-J) entry behaviors, and (K-L) post-entry behaviors—all relative to baseline. For measures unrelated to speed of locomotion, we subtracted the baseline trial average from the foam-pit trial average; zero indicates no difference (gray horizontal lines). For measures dependent on speed of locomotion, we divided the foam-pit trial average by the baseline trial average (to adjust for increased speed across sessions); 100% indicates no difference (gray horizontal lines). Red and green bars show each pit-avoid and pit-go infant’s data across 7 sessions, respectively; symbols denote each infant’s mean; error bars denote ± 1 standard error. Red and green asterisks denote significant differences between foam-pit and baseline trials for pit-avoid and pit-go groups, respectively; black asterisks denote significant differences between pit-avoid and pit-go groups. Note that 3 pit-avoid infants never entered the foam pit so J-L represent data from 9 pit-avoid infants. (M) Correlations between behaviors at the trial level (i.e., co-occurrence of different behaviors within a trial). To account for the nested data structure due to repeated and longitudinal observations, each variable was centered by each infant’s mean across sessions (i.e., subtracted the subject mean from the raw data) to remove between-subject effects and reveal between-trial effects. Only significant correlations are shown (note, given the large degrees of freedom, negligible correlations < .10 were statistically significant). Color denotes the size of the coefficients. Black outlines highlight moderate (≥ .30) and large (≥ .50) coefficients.
For other variables, changes on foam-pit trials were more pronounced in one group. Both groups had longer latencies (Figure 4A), spent more time touching the focal area (Figure 4C), and more frequently stopped moving after entering the focal area (Figure 4K), Wald χ2s > 12.04, ps < .001. However, pit-avoid infants showed larger changes than pit-go infants, confirmed by an interaction between condition and group, Wald χ2s > 11.91, ps < .001. Both groups also used alternative postures to enter the focal area more frequently on foam-pit than baseline trials (Figure 4H), Wald χ2 s > 7.75, ps < .01. But pit-go infants showed a larger increase than pit-avoid infants, Wald χ2 = 7.44, p < .001.
Finally, changes in social-emotional behaviors were unique to the pit-avoid group: Only pit-avoid babies showed increased requests for help (Figure 4E) and pointing (Figure 4F) and decreased positive emotional expressions before and after entry on foam-pit trials compared to baseline (Figure 4DL), confirmed by an interaction between condition and group, Wald χ2 s > 10.72, ps < .001. Pit-avoid infants showed significant differences between foam-pit and baseline, Wald χ2s > 15.91, ps < .001, whereas pit-go infants did not, Wald χ2s < 3.28, ps > .07.
Each behavior represents something unique. As shown in Figure 4M, more than half of the behaviors were correlated, but most correlations were negligible to small (<.30). Moderate correlations were rare, typically between latency, avoidance, requesting help, touching, and looking. Only the correlation between latency and avoidance was strong (>.50).
Learning Within, Between, and Across Sessions, and from Crawling to Walking
Based on the “multi-expression, relativist, agnostic, individualized” approach, we considered using composite variables (arising from factor analysis) and each variable separately to test changes within, between, and across sessions. Latency emerged as the single most appropriate variable for several reasons: Latency is a “global” variable because other behaviors such as avoidance, touching, requesting help, and pointing can contribute to increased latency; it is a continuous variable with sufficient variance to reflect change (in contrast to binary or ordinal variables such as alternative postures or negative facial expressions); it is sufficiently sensitive and reliable to represent learning at a trial level (in contrast to low-frequency variables such as requesting help); and it characterizes learning for both groups (in contrast to variables such as avoidance that reflect learning only in one group). To adjust for increased locomotor speed across sessions, we normalized latency by the average baseline latency in the current session for trial-level comparisons, and we used relative latency by dividing the average of the foam-pit trials by the average of the baseline trials for session-level comparisons.
Learning Within Sessions
Both pit-avoid and pit-go infants showed within-session learning based on comparisons between their first and last foam-pit trials (Figure 2, asterisks). Infants displayed longer normalized latency in their last foam-pit trial relative to their first, Wald χ2 = 13.62, p < .001, with no interaction between group and trial, Wald χ2=.01, p = .95 (Figure 5A, left panel). Increased latency emerged in infants’ first session, Wald χ2 = 5.00, p = .03.
Figure 5.
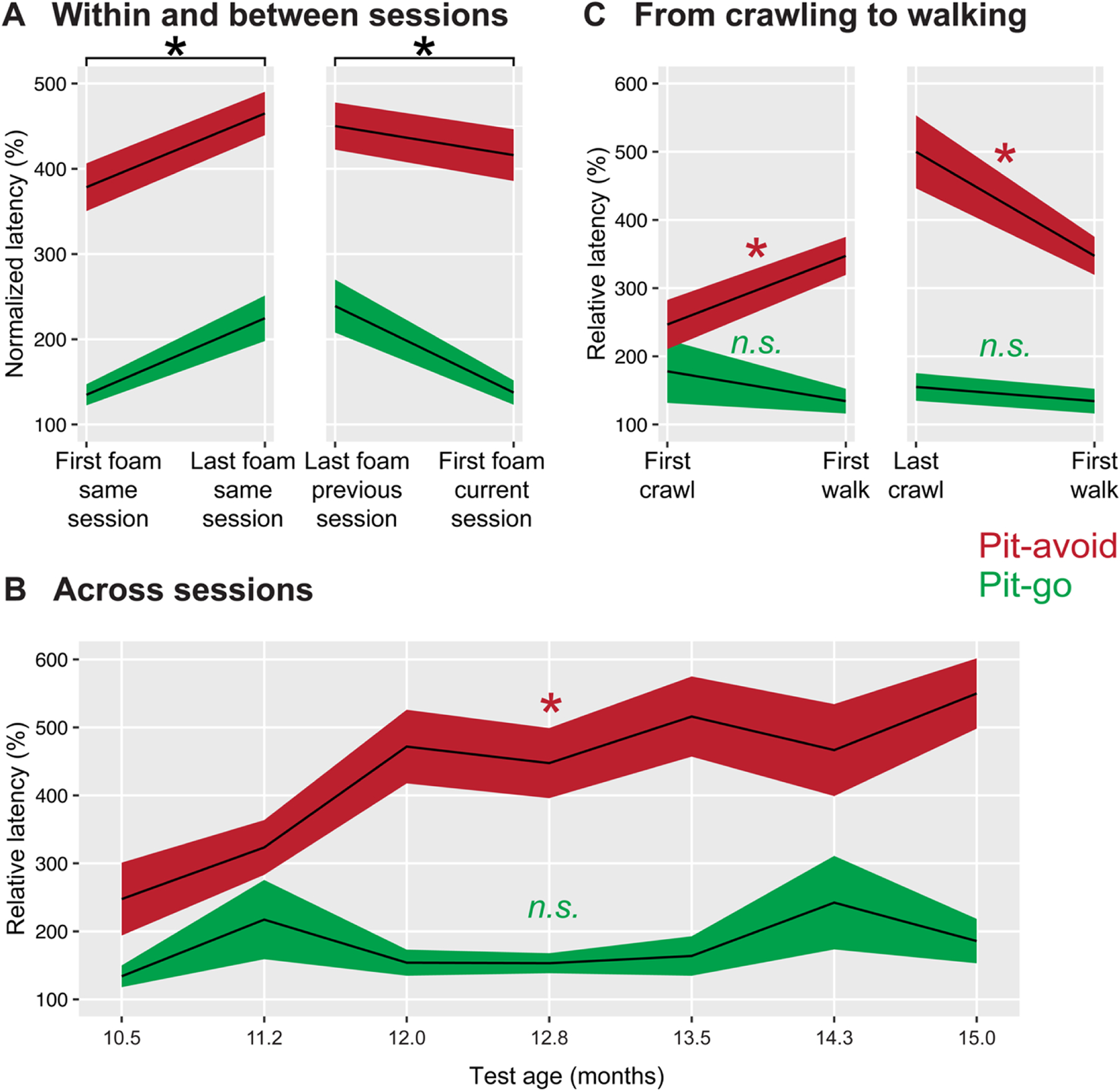
Learning Across Time and Locomotor Status
Note. (A) Left panel: Learning within sessions. Comparison of normalized latency (target trial divided by baseline average) between the first and last foam-pit trials in the same session. Right panel: Learning between consecutive sessions. Comparison of normalized latency between the last foam-pit trial of the previous session and the first foam pit trial of the current session. (B) Learning across all 7 sessions: Comparison of relative latency (average of foam pit trials divided by average of baseline trials) across sessions. (C) Transfer of learning from crawling to walking. Left panel: Comparison of relative latency between first crawling and first walking sessions. Right panel: Comparison of relative latency between last crawling and first walking sessions. Red and green colors denote pit-avoid and pit-go infants. Shaded regions denote ± 1 standard error. Asterisks denote significant differences.
Learning Between and Across Sessions
Both groups needed a “reminder” between consecutive sessions based on comparisons between their last foam-pit trial of the previous session and their first foam-pit trial of the current session (Figure 2, gray vertical arrows). Normalized latency in the first foam-pit trial in the current session was lower compared to the last foam-pit trial in the previous session, Wald χ2 = 5.69, p < .001, with no interaction between group and trial, Wald χ2 = 1.41, p = .24 (Figure 5A, right panel).
Pit-avoid infants showed increased magnitude of learning across seven sessions (Figure 2, gray horizontal arrow) as evidenced by increased relative latency, Wald χ2 = 24.43, p < .001, but pit-go infants did not, Wald χ2 = .62, p = .43, confirmed by an interaction between group and session, Wald χ2 = 8.17, p = .004 (Figure 5B).
Transfer Across the Transition from Crawling to Walking
Despite a decrement at walk onset, pit-avoid infants showed partial transfer from crawling to walking based on comparisons between the first walking session and the first and last crawling sessions (Figure 2, gray brackets). As shown in Figure 5C (right panel), pit-avoid infants showed decreased relative latency in their first walking session compared to their last crawling session (decrement in learning), Wald χ2 = 5.57, p = .02, whereas pit-go infants showed consistently low latencies at both sessions, Wald χ2 = .96, p = .33, confirmed by an interaction between group and session, Wald χ2 = 3.80, p = .05.
Nonetheless, pit-avoid infants showed increased relative latency in their first walking session compared to their first crawling session, Wald χ2 = 6.78, p = .01, suggesting that learning did not completely restart at walk onset (Figure 5C, left panel), whereas pit-go infants showed low latencies at both sessions, Wald χ2 = .95, p = .33, confirmed by an interaction between group and session, Wald χ2 = 5.92, p = .02. The boost at the first walking session was not merely due to infants being older than in the first crawling session. Comparisons with the cross-sectional 15-month walkers in Joh and Adolph (2006) confirmed that experience with the foam pit as a crawler, not age, was key (Figure A4).
Partial-data Infants Were Pit Haters
The 10 infants in the partial data group might be characterized as “pit-haters.” After falling in the foam pit, pit-haters displayed extremely negative emotional expressions and frequently refused to continue, even on baseline trials. Of the 17 sessions where pit-haters entered the study, in seven sessions, they screamed or cried loudly with tears, and they continued to fuss on subsequent baseline trials, so the experimenter terminated the sessions early (Figure A1). However, in their 10 complete sessions, negative emotional expressions in these pit-hating infants (15.6% of foam-pit trials) did not differ from pit-avoid infants (14.0%), Wald χ2 = .06, p = .80, but were more pronounced compared to pit-go infants (1.9%), Wald χ2 = 18.17, p < .001. Moreover, pit-hating appeared to carry over from prior sessions: Pit-haters failed to enter the study on the initial baseline trials on 50% of subsequent sessions and 7 pit-haters dropped out of the study. In contrast, pit-avoid and pit-go infants failed to enter the study on only 6% and 2% of their sessions, respectively, and all completed the study.
Discussion
What behavioral changes constitute evidence of learning or other psychological functions? We tested infants longitudinally in a situation that required cue-consequence associative learning—falling into a visually distinct, squishy foam pit. Based on the classic measure of avoidance (Gibson & Walk, 1960), we found that half the infants (termed “pit-avoid”) learned to avoid the foam pit after falling on prior encounters. The other half (“pit-go”) rarely avoided and fell on trial after trial in session after session. According to a “one-size-fits-all” approach to learning, we would have concluded that pit-go infants did not show reliable evidence of learning, akin to the “nonlearners” in Joh and Adolph (2006). However, a “multi-expression, relativist, agnostic, individualized” approach led to the opposite conclusion—that every infant, including the repeated fallers, showed robust evidence of learning at every session, albeit with a distinctly non-adult-like behavioral profile.
Navigation of Deformable Surfaces Based on Learning from Falling
Since Gibson’s famous “visual cliff” study in 1960, dozens of studies examined infant locomotion over drop-offs, slopes, bridges, and so on, where visual depth cues from a distance reliably specify the change in elevation, slant, or extent (for reviews, see Adolph & Hoch, 2019; Adolph et al., 2021). Infants (like adults) can avoid falling on their first encounter. But to achieve adult-like accuracy, infants require months of everyday crawling and walking experience to learn the sequence of visual-to-tactile, information-generating behaviors to detect the critical relations between their bodies and the environment. Moreover, because affordances and the exploratory behaviors that reveal them differ for crawling and walking, learning does not transfer over the developmental transition from crawling to walking. In contrast, few studies examined locomotion over deformable or slippery surfaces where no reliable visual cues specify novel changes in rigidity and friction (Gibson et al., 1987; Joh & Adolph, 2006). Infants (like adults) typically fall on their first encounter. Without a learned sequence of visual-to-tactile exploratory behaviors, people of all ages must rely on fixed, cue-consequence associations to avoid falling on subsequent encounters; that is, they must associate arbitrary visual cues for the surface (bumpiness, shine, etc.) with the consequence of falling (Adolph & Joh, 2009).
The current study asked whether infants could learn to associate salient visual cues for the deformable surface with the consequences for locomotion. If so, infants can quickly associate visual cues with action consequences in a context where the consequences are tangible and potentially injurious. Had we relied primarily on group averages of avoidance or latency to infer learning (as Gibson and Joh did in prior work), we would have concluded that 10- to 15-month-olds show little evidence of learning across trials, sessions, and the developmental transition from crawling to walking. But by using multiple behavioral expressions of learning, comparing each infant’s behavior to their own baseline in that session, and remaining agnostic about the direction and magnitude of behavioral change, we discovered that every infant showed reliable evidence of learning in every session—albeit via one of two consistent learning profiles across sessions. In other words, every infant responded differentially, and their responses were adaptive in the sense that their behaviors were safe (i.e., falling into the foam pit did not require an experimenter to catch the infants) and suited to their predilections for coping with an impending fall. Note, pit-go infants might exhibit the pit-avoid profile in other situations if their initial encounter was onerous.
Nonetheless, we found that infant associative learning was relatively slow and fleeting compared to adults—even in the pit-avoid infants who were consistently motivated to avoid falling. Both pit-avoid and pit-go infants required multiple encounters with the foam pit to demonstrate within-session learning: Only 3 pit-avoid infants (25%) showed one-trial learning from falling in their first session, compared to 83% of adults in prior work (Joh & Adolph, 2006). And, based on latency, transfer to new sessions was flimsy at best. Infants in both groups required a reminder about the foam pit between consecutive sessions, and even then, only pit-avoid infants showed increased magnitude of responding over the seven sessions. Pit-go infants showed no clear evidence of learning over sessions.
Learned irrelevance may explain the difference between infants and adults in speed and retention of associative learning (Adolph & Joh, 2009). During everyday play, infant falls are frequent—17 times per hour (Adolph et al., 2012). Most falls in new walkers result from spontaneous movements such as turning their heads or lifting their arms, not from variations in the ground surface (Han et al., 2021). Because surface features are not well correlated with infant falls, visual cues about the ground surface (especially color, shine, texture, and the like) are largely irrelevant for balance. So, infants learn to ignore such cues. In contrast, adults rarely fall. And when they do fall, it is likely caused by variations in the ground. Visual cues such as color, texture, and shine are extremely relevant. Thus, adults are likely to search for and identify causal relations between visual cues and the consequences for balance and locomotion, and they are likely to quickly learn the association and remember it. Indeed, infants in both groups showed high levels of looking at the foam pit relative to baseline, meaning they deliberately attended to the change in the ground surface. But unlike adults, infants did not quickly associate the visual cues for the foam pit with the consequences for locomotion.
Our study is the first to test whether learning to navigate deformable surfaces transfers from crawling to walking. Presumably, simple, fixed associations between visual cues for the deformable surface and falling should transfer (Adolph & Joh, 2009). However, the current study shows that pit-avoid infants showed only partial transfer (evidenced by a boost in learning in their first walking session compared to their first crawling session but also a decrement compared to their last crawling session). Uniformly low relative latency in pit-go infants across sessions provides no clear evidence of transfer from crawling to walking. Perhaps learned irrelevance also explains partial (rather than full) transfer from crawling to walking. Compared to crawling, infants incur more falls as novice walkers than as experienced crawlers (Adolph et al., 2012). Thus, learned irrelevance may be heightened when infants first begin walking such that infants do not readily remember or retrieve the cue-consequence associations they learned as experienced crawlers.
Behavioral Differences in Demonstration of Learning: Pit-avoid, Pit-go, and Pit-hating Infants
Behavioral profiles differed among the pit-avoid, pit-go, and pit-hating infants with striking consistency within and across sessions and from crawling to walking. Pit-avoid infants consistently avoided the foam pit and displayed increased requests for help, pointing, and negative emotional expressions relative to baseline; they treated falling as an aversive “pitfall” and were inclined to “stop.” Pit-go infants rarely avoided or stopped moving after entry, and they did not increase social bids or negative emotions, but they showed more use of alternative postures; they treated falling as a trivial “pratfall” and were inclined to “go.” Although both groups showed longer latencies, more looking and touching, longer entry times, and increased frequency of changing their minds relative to baseline, the magnitude of behavioral changes was larger in pit-avoid infants. Most variables showed bimodal distributions that reflected the pit-avoid and pit-go groups. Thus, the overall group averages did not characterize any infant in the sample. Infants who contributed partial data constituted a third “pit-hating” group. Pit-haters displayed intensely negative responses to the foam pit that generalized to subsequent baseline trials and to the entire task on subsequent sessions.
Learned irrelevance explains the lack of one-trial learning in both groups, and indifference to falling explains repeated falls in pit-go infants. But what explains the group differences in infants’ expression of learning? Sex, crawl and walk onset ages, notable falls, and experience with squishy surfaces were unrelated to group membership. We did not collect independent measures of temperament, stranger anxiety, or attachment so we cannot know whether pit-avoid and pit-go membership was due to a specific response to the foam pit or a generalized response across contexts. The omission is unfortunate, given our findings of two consistent behavior profiles. Pit-haters may have been generally more reactive, irritable, or stranger-anxious, but such factors do not readily explain pit-avoid and pit-go membership. Both pit-avoid and pit-go infants were comfortable in the lab environment, being separated from their caregiver in each trial, and being handled by unfamiliar experimenters. Both groups quickly traversed the walkway and displayed neutral or positive emotional expressions on baseline trials at the start of each session and after each block of foam-pit trials. We also could not determine whether group differences were a difference in degree or in kind. That is, pit-haters may be an exaggerated version of pit-avoid infants and pit-go babies may be a toned-down version. Regardless, the possibility that infants may display different responses in the same task (due to temperament, specific preferences, etc.) calls for researchers to consider different behavioral profiles in infants’ expression of learning.
What Falling into a Foam-pit Tells Us about Inferring Learning Based on Behaviors
The current study highlights two broader issues. First, our findings illustrate the benefits of a multi-expression, relativist, agnostic, individualized approach. Rather than using multiple outcome measures and procedures (i.e., a battery of behavioral tasks, physiological recordings, parent report questionnaires, and test instruments), we used multiple behavioral expressions of learning over repeated trials in a single task to reveal learning via different sets of behaviors. Moreover, multiple behavioral outcomes in a single task can provide converging evidence to corroborate interpretations of findings and/or to nuance interpretations. Avoidance, latency, use of alternative postures, looking, touching, time to enter, and changing their minds provided converging evidence that all the infants learned the cue-consequence association and anticipated the threat to balance posed by the foam pit. In addition, the different assembly of behavioral changes (e.g. differences in social-emotional behaviors between pit-avoid and pit-go infants) nuance this interpretation: Likely, the two groups “felt” differently about the foam pit. The pit-avoid and pit-hating infants considered falling into the foam pit to be an aversive event, whereas the pit-go infants considered falling to be unimpactful.
Similarly, developmental work that typically relies on a single behavior—for example, duration of looking in violation of expectation studies—might benefit from scoring multiple behaviors (where on the display infants direct their visual attention, facial expressions, pupil dilation, gestures, manual actions, vocalizations and so on). Accordingly, infants’ manual exploration of test objects converged with differential looking times to support the interpretation that “odd” object events violated babies’ expectations (Perez & Feigenson, 2022; Sim & Xu, 2017). However, when researchers scored infants’ facial expressions and gestures as well as their looking times, the additional behaviors showed no difference between possible and impossible events, constraining the interpretation that infants were “surprised” by the “unexpected” events (Scherer et al., 2004). Perhaps most famously, in Piaget’s A-not-B test of object permanence in infants, longer looking at the B location belies the negative interpretation of failure to manually search at the B location (e.g., Cuevas & Bell, 2010).
Nonetheless, the multi-expression approach may raise concerns about spurious findings. The risk of spurious findings can be reduced with several strategies—prioritizing meaningful, interpretable behaviors with face validity; excluding redundant variables with high interdependency; identifying consistent patterns of results with a large effect size; planning analyses ahead of time; and reporting all findings, regardless of statistical significance.
Moreover, normalizing each participant’s test trials to their baseline behaviors allows evidence of differential responding that is agnostic about the direction of effects (e.g., negative or positive facial expressions) and the magnitude of responding (e.g., both small and large behavioral changes). Baseline comparisons also control for factors not of interest such as increases in speed with age and experience. Similarly, in the mobile paradigm, researchers routinely test learning by comparing the frequency of contingent leg kicks to each infant’s baseline kick rate, thus accounting for individual differences in activity level and arousal (Rovee & Rovee, 1969; Rovee-Collier & Cuevas, 2009; Thelen, 1994). In addition, baseline comparisons help determine the source of the effect. Here, lack of change across baseline trials indicates that pit-avoid and pit-go infants learned about the visual cues for the foam pit, not the location of the focal area, whereas heightened responses across baselines for pit-hating infants suggests they generalized learning to the location or the entire task. Finally, comparisons across baseline trials ensure that infants do not become fatigued, fussy, or inattentive across trials (e.g., Adolph, 1997; Franchak & Adolph, 2012).
A second broader take-away highlighted by the current study is that infants are not little adults. Adult researchers are always susceptible to adult intuitions about behavior, but inferences based on an “adult-centric” view incur risk of misinterpreting infant behavior. Infant behavior might be an ontogenetic adaptation divorced from adult-like requirements, infants’ knowledge and reasoning might be incommensurate with that of adults, and infants might live in their own non-adultlike developmental niche (Carey, 1988; Oppenheim, 1980). Put simply: Infants might be different beasts.
Here, the adult-centric view would lead us to expect that infants are motivated to avoid falling, just like adults (Chamberlin et al., 2005); therefore, if infants learn from prior falls, they should avoid fall-inducing surfaces, locations, and activities. However, falling in infants and adults impacts different bodies, occurs in different social contexts, and follows different developmental histories. Falling from upright to the floor is the leading cause of accidental injury and death in older adults (Centers for Disease Control and Prevention, 2003; Robinovitch et al., 2013). But for infants, floor falls are trivial (Han & Adolph, 2021). For adults, falling is socially embarrassing. Not so for infants. For adults, fall histories are measured in years, but for infants, fall histories are measured in hours (Adolph et al., 2012). Accordingly, pit-go infants did not show adult-like avoidance of the foam pit.
Likewise, in other contexts, infants’ behavior can defy researchers’ commonsense, “rational,” adult-centric expectations (Chu & Schulz, 2020). For example, adults typically walk to go to predetermined destinations and they rationally optimize the path to conserve energy (Brown et al., 2021). But babies typically meander aimlessly, and they often do not choose the shortest path to a destination (Hoch et al., 2019). Indeed, infants of many species engage in gross motor play where energy conservation and rational actions are not high priorities (Burghardt, 2005; Fagen, 1981). More generally, if infants’ motivations and goals do not align with researchers’ adult-centric expectations about what a knowledgeable participant would do in the task, researchers are left to infer the null.
Conclusions
The only way to guide locomotion adaptively over surfaces varying in rigidity or friction is to learn associations between arbitrary visual cues about the surface and the consequences of traversal for balance and locomotion. Here, infants displayed stable behavioral differences in their expression of learning about surfaces varying in rigidity, and half of the babies displayed learning in ways that were decidedly not adult-like. Findings highlight the benefits of using individualized comparisons to baseline responses across multiple behaviors in a single task, and the perils of relying solely on a one-size-fits-all approach and of adopting an adult-centric perspective for interpreting infant behaviors.
Constraints on Generality
Our work converged with prior research showing that many experienced crawling and walking infants do not avoid falling on flat ground during free play and on slippery and squishy surfaces—all situations that lack visual depth cues to specify the risky obstacle (Adolph et al., 2010; Han & Adolph, 2021; Joh & Adolph, 2006). Although sample size in the current study was modest, our individualized analyses across 12 behaviors on multiple trials and sessions suggest that the findings are robust. Moreover, we expect that behavioral differences in infants’ expression of learning exist across a variety of tasks, paradigms, and testing scenarios. Therefore, we propose that a “multi-expression, relativist, agnostic, individualized” approach is more likely to identify behavioral profiles and reduce adult-centric biases compared with a one-size-fits-all approach.
Context of the Research
The senior author, Karen Adolph, trained by Eleanor Gibson (who invented the visual cliff), had a long-held belief that infants find falling aversive. Over her 35-year career, Karen’s studies of infant locomotion over drop-offs, slopes, gaps, bridges, ledges, and so on showed that experienced crawlers and walkers consistently avoid falling at the edge of a precipice. But in her studies of infant locomotion over surfaces varying in rigidity and friction, many experienced walkers fell repeatedly suggesting they did not learn from falling—prompting inquiry into the difference between ground surfaces that vary in depth and those that do not.
During a sabbatical visit in 2016, Stephen Robinovitch, an expert in falling in older adults, suggested we take a closer look at infant falls during free play. When we did so, Danyang Han found that infants’ everyday falls are frequent but trivial—infants rarely fussed, caregivers rarely showed concern, and infants were back at play within seconds (Han & Adolph, 2021). Moreover, infants did not avoid the objects or locations that were implicated in their previous falls. We realized that we had adopted the “adult-centric” assumption that infants find falling aversive and avoidance provides the primary evidence of learning from falling. So, we revisited Amy Joh’s 20-year-old, unpublished dataset of infant learning from falling into a squishy foam pit. This time, we examined infant learning with no a priori assumptions about how infants should express learning. We used a suite of behaviors to capture different behavioral profiles and individualized comparisons to baseline responses to remain agnostic about the direction and magnitude of behavioral change. We found that all infants learned from falling. But some infants expressed learning in ways that differ markedly from adult-centric assumptions. “Pit-go” infants were not motivated to avoid falling and “pit-haters” were not motivated to participate at all.
Public Significance Statement.
Infants express learning in different ways. After falling into a squishy foam pit, some babies avoided falling on subsequent encounters, whereas others fell repeatedly. Based on a predetermined, adult-like criterion—avoidance—for learning about fall-inducing obstacles, we would have concluded that repeated fallers did not learn. But based on change across a suite of behaviors relative to baseline patterns of responding, we found that repeated fallers also learned from falling, but in distinctly non-adult-like ways. Instead of treating falls as aversive “pitfalls,” they treated falls as unimpactful “pratfalls.”
Funding statement:
This research was supported by National Institute of Child Health and Human Development grant R01- HD033486 and Defense Advanced Research Projects Agency grant N66001-19-2-4035 to Karen E. Adolph. Portions of this work were presented at the Society for Research in Child Development in 2021.
We thank Ori Ossmy for his advice on machine learning procedures, Patrick Shrout for his advice on statistical analysis, and the members of the NYU Infant Action Lab for data collection.
Appendix A
Figure A1.

Participants and Testing Sessions in the Full-data and Partial-data Group
Note. Each row represents one infant’s testing sessions with infant ID on the right side ordered by the sequence we ran the infants in the full-data (top panel) or partial data (bottom panel) group; red and green colors show pit-avoid and pit-go infants in the full-data group, respectively. The x-axis shows infants’ average age at each test session. The blue and pink bars show crawling and walking sessions; the start of the pink bar indicates walk onset. Numbers (e.g. 1, 2, 3) represent the session numbers of complete (in black) and incomplete (in gray) sessions. “Xs” show the “no-enter” sessions where infants refused to crawl or walk in the initial baseline trials and no useable data were collected. Skipped numbers along rows show missing sessions. In the full-data group, infant #9 belly crawled in the first session; infant #8 did not walk by the end of the study.
Figure A2.

Latency, Avoidance, and Entry Posture for Each Foam-pit Trial in Each Session for Each Infant in the Full-data Group
Note. Each row represents one infant (ID numbers to right, ordered by the sequence of data collections). Upper and lower panels show pit-avoid (red) and pit-go (green) infants, respectively. Each column represents one session. Symbol colors denote avoidance (red), alternative posture (blue), or original posture (green). Yellow circles denote crawlers who fell on the first encounter of the foam pit. Infant #14 did not fall into the foam pit on the first encounter; infants #4, #17, and #19 fell into the foam pit, then scooted backward onto the wooden platform and ultimately avoided. X-axis represents foam-pit trial number (sessions ended after 3 consecutive trials within a trial block when infants avoided or used alternative postures); y-axis represents latency (avoid trials had 30s latency unless infants detoured off the walkway). Dark gray sessions had incomplete data (ended prematurely due to infant fussiness or fatigue); blank sessions were missing or “no-enter” sessions; crawling sessions were blue and walking sessions were pink. Note: in a few cases, video coding (shown here) caught discrepancies in online procedures where the experimenter gave an extra trial (e.g., S#11, session 6) or missed a required trial (e.g., S#18, session 2).
Figure A3.

Objective Clustering Procedure Based on Patterns of Avoidance
Note. We used longitudinal k-means clustering (KmL; an implementation of k-means method for longitudinal data; Genolini & Falissard, 2010) as an objective way to sort infants into groups based on their patterns of avoidance of the foam pit using the R package kml (Genolini et al., 2015). We used each infant’s relative avoidance rate (difference between foam-pit and baseline trials) at each session as the seven measures for clustering. (A) Optimal number of clusters (2–9) based on the Caliński-Harabasz (CH) index (Caliński & Harabasz, 1974), which calculates the ratio of the average between-cluster variance and the average within-cluster variance for different number of clusters. A higher CH index indicates better clustering and the highest CH index determines the optimal number of clusters. Number symbols denote the CH index for each possible number of groups (e.g., “2” denotes the index when clustering infants into 2 groups). X-axis shows results from 20 runs for each number of groups, sorted from highest to lowest CH index. Two groups showed the highest CH index. (B) Longitudinal k-means clustering revealed the same two groups of pit-avoid and pit-go infants as in other analyses (shown in red and green lines). Gray lines show each infant’s relative avoidance trajectories across 7 sessions.
Figure A4.

Comparisons Between the Current Study and the 15-month-old, Cross-sectional Infants in Joh & Adolph (2006)
Note. (A) Comparisons between the first walking session of the current study and Joh & Adolph’s (2006) 15-month-olds. Left panel: Relative latency. Right panel: Relative avoidance. Infants showed more relative avoidance in their first walking session compared to Joh & Adolph’s 15-month-olds, p = .04, although relative latencies did not differ, p = .27, suggesting that learning transferred from crawling sessions. (B) Comparison between 15-month sessions in current study and the 15-month-olds in Joh & Adolph. Left panel: Relative latency. Right panel: Relative avoidance. Infants showed higher relative latencies at their 15-month session compared with Joh & Adolph’s 15-month-olds, p = .01, although relative avoidance did not differ, p =.13, suggesting that prior experience with the foam-pit, not age, explains increased relative latency. Red and green colors denote pit-avoid and pit-go infants; gray denotes infants from Joh & Adolph (2006). Black lines denote group means. Asterisks denote significant differences. We obtained the same pattern of results regardless of whether we used Joh & Adolph’s stopping criterion to analyze the current data (as reported here) or our own stopping criterion (described in Methods).
Appendix B
Table B1.
GEE Models Predicting Behavioral Measures from Pit-avoid vs Pit-go Group, Baseline vs Foam-pit Trial Condition and the Interaction of Group and Condition
| Pit-avoid as reference group | Pit-go as reference group | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| B | Wald χ 2 | 95% CI | p | B | Wald χ 2 | 95% CI | p | ||
| Latency | pit-avoida | .82 | 1.84 | [−.37, 2.01] | .18 | ||||
| pit-gob | −.82 | 1.84 | [−2.01, .37] | .18 | |||||
| basefoamc | 18.16*** | 492.93 | [16.55, 19.76] | <.001 | 4.09*** | 25.06 | [2.49, 5.70] | <.001 | |
| pit-avoid x basefoam | 14.06*** | 147.82 | [11.80, 16.33] | <.001 | |||||
| pit-go x base-foam | −14.06*** | 147.82 | [−16.33, −11.80] | <.001 | |||||
| Look at focal area | pit-avoida | −.007 | .04 | [−.07, .06] | .84 | ||||
| pit-gob | .007 | .04 | [−.06, .07] | .84 | |||||
| basefoamc | .81*** | 567.30 | [.74, .88] | <.001 | .76*** | 552.10 | [.70, .82] | <.001 | |
| pit-avoid x basefoam | .05 | 1.08 | [−.04, .14] | .30 | |||||
| pit-go x basefoam | −.05 | 1.08 | [−.14, .04] | .30 | |||||
| Touch focal area | pit-avoida | −.003 | .55 | [−.01, .004] | .46 | ||||
| pit-gob | .003 | .55 | [−.004, .01] | .46 | |||||
| basefoamc | 1.73*** | 24.80 | [1.05, 2.41] | <.001 | .45*** | 12.04 | [.20, .71] | .001 | |
| pit-avoid x basefoam | 1.28*** | 11.91 | [.55, 2.01] | .001 | |||||
| pit-go x basefoam | −1.28*** | 11.91 | [−2.01, −.55] | .001 | |||||
| Approach area emotional expression | pit-avoida | −.10 | 1.97 | [−.24, .04] | .16 | ||||
| pit-gob | .10 | 1.97 | [−.04, .24] | .16 | |||||
| basefoamc | −.37*** | 31.06 | [−.50, −.24] | <.001 | −.04 | 1.87 | [−.09, .02] | .17 | |
| pit-avoid x basefoam | −.33*** | 21.41 | [−.47, −.19] | <.001 | |||||
| pit-go x basefoam | .33*** | 21.41 | [.19, .47] | <.001 | |||||
| Request help | pit-avoida | .001 | .11 | [−.01, .01] | .74 | ||||
| pit-gob | −.001 | .011 | [−.01, .01] | .74 | |||||
| basefoamc | .27*** | 20.65 | [.15, .38] | <.001 | .03 | 3.28 | [−.03, .07] | .07 | |
| pit-avoid x basefoam | .24*** | 14.64 | [.11, .36] | <.001 | |||||
| pit-go x basefoam | −.24*** | 14.64 | [−.36, −.11] | <.001 | |||||
| Point | pit-avoida | −.001 | .001 | [−.04, .04] | .98 | ||||
| pit-gob | .001 | .001 | [−.04, .04] | .98 | |||||
| basefoamc | .13*** | 15.91 | [.07, .20] | <.001 | .02 | 1.24 | [−.01, .04] | .27 | |
| pit-avoid x basefoam | .12*** | 10.72 | [.05, .19] | .001 | |||||
| pit-go x basefoam | −.12*** | 10.72 | [−.19, −.05] | .001 | |||||
| Avoidance | pit-avoida | .000 | .000 | [−.01, .01] | .98 | ||||
| pit-gob | .000 | .000 | [−.01, .01] | .98 | |||||
| basefoamc | .77*** | 276.02 | [.68, .86] | <.001 | .12*** | 15.95 | [.06, .18] | <.001 | |
| pit-avoid x basefoam | .65*** | 139.23 | [.54, .76] | <.001 | |||||
| pit-go x basefoam | −.65*** | 139.23 | [−.76, −.54] | <.001 | |||||
| Alternative posture | pit-avoida | .000 | .26 | [.00, .00] | .61 | ||||
| pit-gob | .000 | .26 | [.00, .00] | .61 | |||||
| basefoamc | .05** | 7.75 | [.02, .09] | .01 | .16*** | 19.85 | [.09, .23] | <.001 | |
| pit-avoid x basefoam | −.11** | 7.44 | [−.19, −.03] | .01 | |||||
| pit-go x basefoam | .11** | 7.44 | [.03, .19] | .01 | |||||
| Change mind | pit-avoida | .000 | .03 | [−.001, .001] | .88 | ||||
| pit-gob | .000 | .03 | [−.001, .001] | .88 | |||||
| basefoamc | .15*** | 10.63 | [.06, .24] | .001 | .10*** | 15.22 | [.05, .15] | <.001 | |
| pit-avoid x basefoam | .05 | 1.04 | [−.05, .16] | .31 | |||||
| pit-go x basefoam | −.05 | 1.04 | [−.16, .05] | .31 | |||||
| Time to enter | pit-avoida | .05 | .72 | [−.06, .16] | .40 | ||||
| pit-gob | −.05 | .72 | [−.16, .06] | .40 | |||||
| basefoamc | .32*** | 30.00 | [.20, .43] | <.001 | .30*** | 48.11 | [.22, .39] | <.001 | |
| pit-avoid x basefoam | .01 | .03 | [−.13, .15] | .87 | |||||
| pit-go x basefoam | −.01 | .03 | [−.15, .13] | .87 | |||||
| Stop moving after entry | pit-avoida | −.001 | .30 | [−.004, .002] | .59 | ||||
| pit-gob | .001 | .30 | [−.002, .004] | .59 | |||||
| basefoamc | .55*** | 61.24 | [.41, .69] | <.001 | .20*** | 12.33 | [.09, .31] | <.001 | |
| pit-avoid x basefoam | .35*** | 14.80 | [.17, .52] | <.001 | |||||
| pit-go x basefoam | −.35*** | 14.80 | [−.52, −.17] | <.001 | |||||
| Post-entry emotional expression | pit-avoida | −.08 | .99 | [−.23, .08] | .32 | ||||
| pit-gob | .08 | .99 | [−.08, .23] | .32 | |||||
| basefoamc | −.55*** | 17.08 | [−.82, −.29] | <.001 | −.03 | 1.82 | [−.08, .02] | .18 | |
| pit-avoid x basefoam | −.52*** | 14.65 | [−.79, −.25] | <.001 | |||||
| pit-go x basefoam | .52*** | 14.65 | [.25, .79] | <.001 | |||||
Note.
0 = pit-go infants, 1 = pit-avoid infants.
0 = pit-avoid infants, 1 = pit-go infants.
condition (baseline versus foam-pit trials); 0 = baseline, 1 = foam pit; data were collapsed across the foam-pit trials and baseline trials separately within a session (e.g., average avoidance rate pooling across foam-pit trials within a session in comparison with average avoidance rate pooling across baseline trials within a session).
p < .01**,
p < .001***
Table B2.
GEE Models Predicting Normalized Latency from Pit-avoid vs Pit-go Group, First vs Last Trial, and the Interaction of Group and Trial Type
| Wald χ2 | p | |||||||
|---|---|---|---|---|---|---|---|---|
| Model effects | ||||||||
| group | 142.39*** | <.001 | ||||||
| trial | 13.62*** | <.001 | ||||||
| group x trial | .01 | .95 | ||||||
| Pit-avoid as reference group | Pit-go as reference group | |||||||
| B | Wald χ 2 | 95% CI | p | B | Wald χ 2 | 95% CI | p | |
| Parameter estimates | ||||||||
| pit-avoida | 2.44*** | 76.84 | [1.90, 2.99] | <.001 | ||||
| pit-gob | −2.44*** | 76.84 | [−2.99, −1.90] | <.001 | ||||
| trialc | .87* | 4.08 | [.03, 1.71] | .04 | .90*** | 18.00 | [.48, 1.31] | <.001 |
| pit-avoid x trial | −.03 | .01 | [−.97, .90] | .95 | ||||
| pit-go x trial | .03 | .01 | [−.90, .97] | .95 | ||||
Note.
0 = pit-go infants, 1 = pit-avoid infants.
0 = pit-avoid infants, 1 = pit-go infants.
0 = first foam-pit trial, 1 = last foam-pit trial.
p < .05*,
p < .001***
Table B3.
GEE Models Predicting Normalized Latency from Pit-avoid vs Pit-go Group, Last Trial of Previous Session vs First Trial of Current Session, and the Interaction of Group and Trial Type
| Wald χ2 | p | |||||||
|---|---|---|---|---|---|---|---|---|
| Model effects | ||||||||
| group | 98.09*** | <.001 | ||||||
| trial | 5.69* | .02 | ||||||
| group x trial | 1.41 | .24 | ||||||
| Pit-avoid as reference group | Pit-go as reference group | |||||||
| B | Wald χ 2 | 95% CI | p | B | Wald χ 2 | 95% CI | p | |
| Parameter estimates | ||||||||
| pit-avoida | 2.11*** | 25.36 | [1.29, 2.94] | <.001 | ||||
| pit-gob | −2.11*** | 25.36 | [−2.94, −1.29] | <.001 | ||||
| trialc | −.34 | .47 | [−1.31, .63] | .49 | −1.02*** | 13.41 | [−1.56, −.47] | <.001 |
| pit-avoid x trial | .67 | 1.41 | [−.44, 1.79] | .24 | ||||
| pit-go x trial | −.67 | 1.41 | [−1.79, .44] | .24 | ||||
Note.
0 = pit-go infants, 1 = pit-avoid infants.
0 = pit-avoid infants, 1 = pit-go infants.
0 = last trial of the previous session, 1 = first trial of the current session.
p < .05*,
p < .001***
Table B4.
GEE Models Predicting Relative Latency from Pit-avoid vs Pit-go Group, Session Number, and the Interaction of Group and Session
| Wald χ2 | p | |||||||
|---|---|---|---|---|---|---|---|---|
| Model effects | ||||||||
| group | 17.01*** | <.001 | ||||||
| session | 15.92*** | <.001 | ||||||
| group x session | 8.17** | .004 | ||||||
| Pit-avoid as reference group | Pit-go as reference group | |||||||
| B | Wald χ 2 | 95% CI | p | B | Wald χ 2 | 95% CI | p | |
| Parameter estimates | ||||||||
| pit-avoida | 1.48*** | 17.01 | [.78, 2.18] | <.001 | ||||
| pit-gob | -1.48*** | 17.01 | [−2.18, −.78] | <.001 | ||||
| sessionc | .42*** | 24.43 | [.26, .59] | <.001 | .07 | .62 | [−.11, .25] | .43 |
| pit-avoid x session | .35** | 8.17 | [.11, .60] | .004 | ||||
| pit-go x session | −.35** | 8.17 | [−.60, −.11] | .004 | ||||
Note.
0 = pit-go infants, 1 = pit-avoid infants.
0 = pit-avoid infants, 1 = pit-go infants.
session = session number −1.
p < .01**,
p < .001***
Table B5.
GEE Model Predicting Relative Latency from Pit-avoid vs Pit-go Group, Last Crawling Session vs First Walking Session, and the Interaction of Group and Session
| Wald χ2 | p | |||||||
|---|---|---|---|---|---|---|---|---|
| Model effects | ||||||||
| group | 92.59*** | <.001 | ||||||
| crawlwalk | 6.48** | .01 | ||||||
| group x crawlwalk | 3.80* | .05 | ||||||
| Pit-avoid as reference group | Pit-go as reference group | |||||||
| B | Wald χ 2 | 95% CI | p | B | Wald χ 2 | 95% CI | p | |
| Parameter estimates | ||||||||
| pit-avoida | 3.45*** | 39.94 | [2.38, 4.52] | <.001 | ||||
| pit-gob | −3.45*** | 39.94 | [−4.52, −2.38] | <.001 | ||||
| crawlwalkc | −1.53* | 5.57 | [−2.79, −.26] | .02 | −.20 | .96 | [−.61, .20] | .33 |
| pit-avoid x crawlwalk | −1.32* | 3.80 | [−2.65, .01] | .05 | ||||
| pit-go x crawlwalk | 1.32* | 3.80 | [−.01, 2.65] | .05 | ||||
Note.
0 = pit-go infants, 1 = pit-avoid infants.
0 = pit-avoid infants, 1 = pit-go infants.
Crawling versus walking sessions; 0 = last crawling session, 1 = first walking session.
p < .05,
p < .01,
p < .001.
Table B6.
GEE Models Predicting Relative Latency from Pit-avoid Vs Pit-go Group, First Crawling Session vs First Walking Session, and the Interaction of Group and Session
| Wald χ2 | p | |||||||
|---|---|---|---|---|---|---|---|---|
| Model effects | ||||||||
| group | 17.26*** | <.001 | ||||||
| crawlwalk | .90 | .34 | ||||||
| group x crawlwalk | 5.92* | .02 | ||||||
| Pit-avoid as reference group | Pit-go as reference group | |||||||
| B | Wald χ 2 | 95% CI | p | B | Wald χ 2 | 95% CI | p | |
| Parameter estimates | ||||||||
| pit-avoida | .69 | 1.53 | [−.40, 1.78] | .22 | ||||
| pit-gob | −.69 | 1.53 | [−1.78, .40] | .22 | ||||
| crawlwalkc | 1.01** | 6.78 | [.25, 1.77] | .01 | −.44 | .95 | [−1.33, .45] | .33 |
| pit-avoid x crawlwalk | 1.45* | 5.92 | [.28, 2.62] | .02 | ||||
| pit-go x crawlwalk | −1.45* | 5.92 | [−2.62, −.28] | .02 | ||||
Note.
0 = pit-go infants, 1 = pit-avoid infants.
0 = pit-avoid infants, 1 = pit-go infants.
Crawling versus walking sessions; 0 = first crawling session, 1 = first walking session.
p < .05*,
p < .01**,
p < .001***
Footnotes
Ethics approval statement: All study procedures were approved by New York University Committee on Activities Involving Human Subjects and adhere to the ethical standards of the Federal Policy for the Protection of Human Subjects. Caregivers of all participants gave their informed consent prior to inclusion in the study.
Conflict of interest disclosure: The authors declare no conflict of interest.
Data availability statement:
Video data and processed data are posted and available. With parent and participant permission, video data from two infants are openly shared with authorized investigators on Databrary.org at databrary.org/volume/1185. Video clips to illustrate the procedure and exemplar infant behaviors are publicly shared (databrary.org/volume/1185/slot/58328). In addition, the de-identified coding spreadsheets and processed data from all infants, the coding manual, coding scripts, and analysis scripts are publicly shared at databrary.org/volume/1185/slot/58325.
References
- Aberg KC, Kramer EE, & Schwartz S (2020). Neurocomputational correlates of learned irrelevance in humans. NeuroImage, 213, 116719. [DOI] [PubMed] [Google Scholar]
- Adolph KE (1997). Learning in the development of infant locomotion. Monographs of the Society for Research in Child Development, 62(3, Serial No. 251), 1–140. [PubMed] [Google Scholar]
- Adolph KE, Cole WG, Komati M, Garciaguirre JS, Badaly D, Lingeman JM, Chan G, & Sotsky RB (2012). How do you learn to walk? Thousands of steps and dozens of falls per day. Psychological Science, 23, 1387–1394. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Adolph KE, & Hoch JE (2019). Motor development: Embodied, embedded, enculturated, and enabling. Annual Review of Psychology, 70, 141–164. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Adolph KE, & Joh AS (2009). Multiple learning mechanisms in the development of action. In Woodward A & Needham A (Eds.), Learning and the infant mind (pp. 172–207). Oxford University Press. [Google Scholar]
- Adolph KE, Joh AS, & Eppler MA (2010). Infants’ perception of affordances of slopes under high- and low-friction conditions. Journal of Experimental Psychology: Human Perception and Performance, 36, 797–811. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Adolph KE, Kaplan BE, & Kretch KS (2021). Infants on the edge: Beyond the visual cliff. In Slater A & Quinn P (Eds.), Developmental psychology: Revisiting the classic studies, 2nd ed (2 ed., pp. 51–72). Sage Publications. [Google Scholar]
- Bhatt RS, & Rovee-Collier CK (1996). Infants’ forgetting of correlated attributes and object recognition. Child Development, 67, 172–187. [PubMed] [Google Scholar]
- Bonardi C, & Ong SY (2003). Learned irrelevance: A contemporary overview. Quarterly Journal of Experimental Psychology, 56B, 80–89. [DOI] [PubMed] [Google Scholar]
- Brown GL, Seethapathi N, & Srinivasan M (2021). A unified energy-optimality criterion predicts human navigation paths and speeds. Proceedings of the National Academy of Sciences, 118, e2020327118. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Burghardt GM (2005). The genesis of animal play: Testing the limits. MIT Press. [Google Scholar]
- Burnay C, & Cordovil R (2016). Crawling experience predicts avoidance of real cliffs and water cliffs: Insights from a new paradigm. Infancy, 21, 677–684. [Google Scholar]
- Burnay C, Cordovil R, Button C, Croft JL, Schofield M, Pereira J, & Anderson DI (2021). The effect of specific locomotor experiences on infants’ avoidance behavior on real and water cliffs. Developmental Science, 24, e13047. [DOI] [PubMed] [Google Scholar]
- Butte NF, Hopkinson JM, Wong WW, Smith EO, & Ellis KJ (2000). Body composition during the first 2 years of life: An updated reference. Pediatric Research, 47, 578–585. [DOI] [PubMed] [Google Scholar]
- Caliński T, & Harabasz J (1974). A dendrite method for cluster analysis. Communications in Statistics: Theory and Methods, 3, 1–27. [Google Scholar]
- Carey S (1988). Conceptual differences between children and adults. Mind and Language, 3, 167–181. [Google Scholar]
- Centers for Disease Control and Prevention. (2003). Web-based Injury Statistics Query and Reporting System (WISQARS). RetrievedDec 26, 2020from www.cdc.gov/injury/wisqars
- Cham R, & Redfern MS (2002). Changes in gait when anticipating slippery floors. Gait and Posture, 15, 159–171. [DOI] [PubMed] [Google Scholar]
- Chamberlin ME, Fulwider BD, Sanders SL, & Medeiros JM (2005). Does fear of falling influence spatial and temporal gait parameters in elderly persons beyond changes associated with normal aging? Journal of Gerontology Series A: Biological Sciences and Medical Sciences, 60, 1163–1167. [DOI] [PubMed] [Google Scholar]
- Chambers AJ, Perera S, & Cham R (2013). Changes in walking characteristics of young and older adults when anticipating slippery floors. IIE Transactions on Occupational Ergonomics and Human Factors, 1, 166–175. [Google Scholar]
- Chu J, & Schulz LE (2020). Play, curiosity, and cognition. Annual Review of Developmental Psychology, 2, 317–343. [Google Scholar]
- Cuevas K, & Bell MA (2010). Developmental progression of looking and reaching performance on the A-not-B task. Developmental Psychology, 46, 1363–1371. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Currey JD (1979). Changes in the impact energy absorption of bone with age. Journal of Biomechanics, 12, 459–469. [DOI] [PubMed] [Google Scholar]
- Fagen R (1981). Animal play behavior. Oxford University Press. [Google Scholar]
- Franchak JM, & Adolph KE (2012). What infants know and what they do: Perceiving possibilities for walking through openings. Developmental Psychology, 48, 1254–1261. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Genolini C, Alacoque X, Sentenac M, & Arnaud C (2015). kml and kml3d: R Packages to Cluster Longitudinal Data. Journal of Statistical Software, 65(4), 1–34. [Google Scholar]
- Genolini C, & Falissard B (2010). KmL: k-means for longitudinal data. Computational Statistics, 25, 317–328. [Google Scholar]
- Gibson EJ, Riccio G, Schmuckler MA, Stoffregen TA, Rosenberg D, & Taormina J (1987). Detection of the traversability of surfaces by crawling and walking infants. Journal of Experimental Psychology: Human Perception and Performance, 13, 533–544. [DOI] [PubMed] [Google Scholar]
- Gibson EJ, & Walk RD (1960). The “visual cliff”. Scientific American, 202, 64–71. [PubMed] [Google Scholar]
- Hamlin JK, Wynn K, & Bloom P (2007). Social evaluation by preverbal infants. Nature, 450, 557–559. [DOI] [PubMed] [Google Scholar]
- Han D, & Adolph KE (2021). The impact of errors in infant development: Falling like a baby. Developmental Science, 24, e13069. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Han D, Rachwani J, Liu Y, & Adolph KE (2021, April). Why infants fall: Development changes the causes of errors as infants acquire new skills [Conference presentation]. Society for Research in Child Development. [Google Scholar]
- Hardin JW, & Hilbe JM (2003). Generalized Estimating Equations. Chapman & Hall ⁄ CRC. [Google Scholar]
- Hoch JE, O’Grady SM, & Adolph KE (2019). It’s the journey, not the destination: Locomotor exploration in infants. Developmental Science, 22, e12740. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Joh AS, & Adolph KE (2006). Learning from falling. Child Development, 77, 89–102. [DOI] [PubMed] [Google Scholar]
- Joh AS, Adolph KE, Campbell MR, & Eppler MA (2006). Why walkers slip: Shine is not a reliable cue for slippery ground. Perception and Psychophysics, 68, 339–352. [DOI] [PubMed] [Google Scholar]
- Joh AS, Adolph KE, Narayanan PJ, & Dietz VA (2007). Gauging possibilities for action based on friction underfoot. Journal of Experimental Psychology: Human Perception and Performance, 33, 1145–1157. [DOI] [PubMed] [Google Scholar]
- Kretch KS, & Adolph KE (2017). The organization of exploratory behaviors in infant locomotor planning. Developmental Science, 20, e12421. [DOI] [PMC free article] [PubMed] [Google Scholar]
- LoBue V, Reider LB, Kim E, Burris JL, Oleas DS, Buss KA, Perez-Edgar K, & Field AP (2020). The importance of using multiple outcome measures in infant research. Infancy, 25, 420–437. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Oppenheim RW (1980). Metamorphosis and adaptation in the behavior of developing organisms. Developmental Psychobiology, 13, 353–3566. [DOI] [PubMed] [Google Scholar]
- Pavol MJ, Runtz E,F, Edwards BJ, & Pai YC (2002). Age influences the outcome of a slipping perturbation during initial but not repeated exposures. Journal of Gerontology: Medical Sciences, 57A, M496–M503. [DOI] [PubMed] [Google Scholar]
- Pavol MJ, Runtz EF, & Pai YC (2004). Young and older adults exhibit proactive and reactive adaptations to repeated slip exposure. Journal of Gerontology: Medical Sciences, 59A, 494–502. [DOI] [PubMed] [Google Scholar]
- Perez J, & Feigenson L (2022). Violations of expectation trigger infants to search for explanations. Cognition, 218, 104942. [DOI] [PubMed] [Google Scholar]
- Perez-Edgar K, Vallorani A, Buss KA, & LoBue V (2020). Individual differences in infancy research: Letting the baby stand out from the crowd. Infancy, 25, 438–457. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Robinovitch SN, Feldman F, Yang Y, Schonnop R, Leung PM, Sarraf T, Sim-Gould J, & Loughin M (2013). Video capture of the circumstances of falls in elderly people residing in long-term care: an observational study. The Lancet, 381, 47–54. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Rovee CK, & Rovee DT (1969). Conjugate reinforcement of infant exploratory behavior. Journal of Experimental Child Psychology, 8, 33–39. [DOI] [PubMed] [Google Scholar]
- Rovee-Collier CK, & Cuevas K (2009). Multiple memory systems are unnecessary to account for infant memory development: An ecological model. Developmental Psychology, 45, 160–174. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Rovee-Collier CK, Griesler PC, & Earley LA (1985). Contextual determinants of retrieval in three-month-old infants. Learning and Motivation, 16, 139–157. [Google Scholar]
- Scherer KR, Zentner MR, & Stern D (2004). Beyond surprise: The puzzle of infants’ expressive reactions to expectancy violation. Emotion, 4, 389–402. [DOI] [PubMed] [Google Scholar]
- Sim ZL, & Xu F (2017). Infants preferentially approach and explore the unexpected. British Journal of Developmental Psychology, 35, 596–608. [DOI] [PubMed] [Google Scholar]
- Thelen E (1994). Three-month-old infants can learn task-specific patterns of interlimb coordination. Psychological Science, 5, 280–285. [Google Scholar]
- Wynn K (1992). Addition and subtraction by human infants. Nature, 358, 749–750. [DOI] [PubMed] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
Video data and processed data are posted and available. With parent and participant permission, video data from two infants are openly shared with authorized investigators on Databrary.org at databrary.org/volume/1185. Video clips to illustrate the procedure and exemplar infant behaviors are publicly shared (databrary.org/volume/1185/slot/58328). In addition, the de-identified coding spreadsheets and processed data from all infants, the coding manual, coding scripts, and analysis scripts are publicly shared at databrary.org/volume/1185/slot/58325.