
Conference matrix: Difference between revisions
Moving Belevitch to References section, now refed multiple times |
Adding short description: "Matrix in math with special properties" |
||
| (39 intermediate revisions by 22 users not shown) | |||
| Line 1: | Line 1: | ||
{{Short description|Matrix in math with special properties}} |
|||
In [[mathematics]], a '''conference matrix''' (also called a '''C'''-'''matrix''') is a |
In [[mathematics]], a '''conference matrix''' (also called a '''C'''-'''matrix''') is a [[square matrix]] ''C'' with 0 on the diagonal and +1 and −1 off the diagonal, such that ''C''<sup>T</sup>''C'' is a multiple of the [[identity matrix]] ''I''. Thus, if the [[matrix (mathematics)|matrix]] has order ''n'', ''C''<sup>T</sup>''C'' = (''n''−1)''I''. |
||
Some authors use a more general definition, which requires there to be a single 0 in each row and column but not necessarily on the diagonal<ref> |
Some authors use a more general definition, which requires there to be a single 0 in each row and column but not necessarily on the diagonal.<ref>{{cite journal | doi = 10.1016/j.jcta.2005.05.005 | volume=113 | issue=4 | title= On the coexistence of conference matrices and near resolvable 2-(2k+1,k,k-1) designs | year=2006 | journal=Journal of Combinatorial Theory, Series A | pages=703–711 | author=Greig Malcolm| doi-access=free }}</ref><ref name="Gropp">{{cite journal | author = Gropp Harald | year = 2004 | title = More on orbital matrices | journal = Electronic Notes in Discrete Mathematics | volume = 17 | pages = 179–183 | doi = 10.1016/j.endm.2004.03.036 }}</ref> |
||
Conference matrices first arose in connection with a problem in telephony.<ref name="Belevitch" >Belevitch, pp. 231-244.</ref> They were first described by [[Vitold Belevitch]] who also gave them their name. Belevitch was interested in constructing ideal telephone conference networks from ideal [[transformer]]s and discovered that such networks were represented by conference matrices, hence the name.<ref>Colbourn and Dinitz, (2007), p.19<br />van Lint and Wilson, (2001), p.98<br />Stinson, (2004), p.200</ref> |
Conference matrices first arose in connection with a problem in [[telephony]].<ref name="Belevitch" >Belevitch, pp. 231-244.</ref> They were first described by [[Vitold Belevitch]], who also gave them their name. Belevitch was interested in constructing ideal [[telephone conference]] networks from ideal [[transformer]]s and discovered that such networks were represented by conference matrices, hence the name.<ref>Colbourn and Dinitz, (2007), p.19<br />van Lint and Wilson, (2001), p.98<br />Stinson, (2004), p.200</ref> Other applications are in [[statistics]],<ref name="Raghavarao">{{cite journal |author=Raghavarao, D. |year=1959 |title=Some optimum weighing designs |journal=[[Annals of Mathematical Statistics]] |volume=30 |issue=2 |pages=295–303 |doi=10.1214/aoms/1177706253 |mr=0104322|doi-access=free }}</ref> and another is in [[elliptic geometry]].<ref name="vL">{{cite journal | author = van Lint J.H., Seidel J.J. | year = 1966 | title = Equilateral point sets in elliptic geometry | journal = Indagationes Mathematicae | volume = 28 | pages = 335–348 }}</ref> |
||
For ''n'' > 1, there are two kinds of conference matrix. Let us normalize ''C'' by, first (if the more general definition is used), rearranging the rows so that all the zeros are on the diagonal, and then negating any row or column whose first entry is negative. (These operations do not change whether a matrix is a conference matrix.) |
For ''n'' > 1, there are two kinds of conference matrix. Let us normalize ''C'' by, first (if the more general definition is used), rearranging the rows so that all the zeros are on the diagonal, and then negating any row or column whose first entry is negative. (These operations do not change whether a matrix is a conference matrix.) |
||
Thus, a normalized conference matrix has all 1's in its first row and column, except for a 0 in the top left corner, and is 0 on the diagonal. Let ''S'' be the matrix that remains when the first row and column of ''C'' are removed. Then either ''n'' is [[ |
Thus, a normalized conference matrix has all 1's in its first row and column, except for a 0 in the top left corner, and is 0 on the diagonal. Let ''S'' be the matrix that remains when the first row and column of ''C'' are removed. Then either ''n'' is [[singly and doubly even|evenly even]] (a multiple of 4) and ''S'' is [[skew-symmetric matrix|skew-symmetric]] (as is the normalized ''C'' if its first row is negated), or ''n'' is [[singly and doubly even|oddly even]] ([[modular arithmetic|congruent]] to 2 modulo 4) and ''S'' is [[symmetric matrix|symmetric]] (as is the normalized ''C''). |
||
==Symmetric conference matrices== |
==Symmetric conference matrices== |
||
If ''C'' is a symmetric conference matrix of order ''n'' > 1, then not only must ''n'' be congruent to 2 |
If ''C'' is a symmetric conference matrix of order ''n'' > 1, then not only must ''n'' be congruent to 2 mod 4 but also ''n'' − 1 must be a sum of two [[square number|squares]];<ref>Belevitch, p.240</ref> there is a clever [[mathematical proof|proof]] by elementary matrix theory in van Lint and Seidel.<ref name="vL" /> ''n'' will always be the sum of two squares if ''n'' − 1 is a [[prime power]].<ref>Stinson, p.78</ref> |
||
Given a symmetric conference matrix, the matrix ''S'' can be viewed as the [[Seidel adjacency matrix]] of a [[graph (mathematics)|graph]]. The graph has ''n'' |
Given a symmetric conference matrix, the matrix ''S'' can be viewed as the [[Seidel adjacency matrix]] of a [[graph (discrete mathematics)|graph]]. The graph has ''n'' − 1 vertices, corresponding to the rows and columns of ''S'', and two vertices are adjacent if the corresponding entry in ''S'' is negative. This graph is [[strongly regular graph|strongly regular]] of the type called (after the matrix) a [[conference graph]]. |
||
The existence of conference matrices of orders ''n'' allowed by the above restrictions is known only for some values of ''n''. For instance, if ''n'' = ''q'' |
The existence of conference matrices of orders ''n'' allowed by the above restrictions is known only for some values of ''n''. For instance, if ''n'' = ''q'' + 1 where ''q'' is a prime power congruent to 1 mod 4, then the [[Paley graph]]s provide examples of symmetric conference matrices of order ''n'', by taking ''S'' to be the Seidel matrix of the Paley graph. |
||
The first few possible orders of a symmetric conference matrix are ''n'' = 2, 6, 10, 14, 18, (not 22, since 21 is not a sum of two squares), 26, 30, (not 34 since 33 is not a sum of two squares), 38, 42, 46, 50, 54, (not 58), 62 {{OEIS|id=A000952}}; for every one of these, it is known that a symmetric conference matrix of that order exists. Order 66 seems to be an open problem. |
The first few possible orders of a symmetric conference matrix are ''n'' = 2, 6, 10, 14, 18, (not 22, since 21 is not a sum of two squares), 26, 30, (not 34 since 33 is not a sum of two squares), 38, 42, 46, 50, 54, (not 58), 62 {{OEIS|id=A000952}}; for every one of these, it is known that a symmetric conference matrix of that order exists. Order 66 seems to be an [[open problem]]. |
||
===Example=== |
===Example=== |
||
The [[essentially unique]] conference matrix of order 6 is given by |
The [[essentially unique]] conference matrix of order 6 is given by |
||
:<math>\begin{pmatrix}0 &+1 &+1 &+1 &+1& +1\\+1& 0 &+1 &-1 &-1& +1\\+1& +1& 0 &+1 &-1& -1\\+1& -1& +1& 0 &+1& -1\\+1& -1& -1& +1& 0& +1\\+1& +1& -1& -1& +1& 0 \end{pmatrix}</math> |
:<math>\begin{pmatrix}0 &+1 &+1 &+1 &+1& +1\\+1& 0 &+1 &-1 &-1& +1\\+1& +1& 0 &+1 &-1& -1\\+1& -1& +1& 0 &+1& -1\\+1& -1& -1& +1& 0& +1\\+1& +1& -1& -1& +1& 0 \end{pmatrix}</math>. |
||
All other conference matrices of order 6 are obtained from this one by flipping the signs of some row and/or column (and by taking permutations of rows and/or columns, according to the definition in use). |
|||
== |
==Skew-symmetric conference matrices== |
||
Skew-symmetric matrices can also be produced by the Paley construction. Let ''q'' be a prime power with residue 3 mod 4. Then there is a [[Paley graph|Paley digraph]] of order ''q'' which leads to a skew-symmetric conference matrix of order ''n'' = ''q'' + 1. The matrix is obtained by taking for ''S'' the ''q'' × ''q'' matrix that has a +1 in position (''i'', ''j'' ) and −1 in position (''j'', ''i'') if there is an arc of the digraph from ''i'' to ''j'', and zero diagonal. Then ''C'' constructed as above from ''S'', but with the first row all negative, is a skew-symmetric conference matrix. |
|||
This construction solves only a small part of the problem of deciding for which evenly even numbers ''n'' there exist |
This construction solves only a small part of the problem of deciding for which evenly even numbers ''n'' there exist skew-symmetric conference matrices of order ''n''. |
||
==Generalizations== |
==Generalizations== |
||
Sometimes a conference matrix of order ''n'' is just defined as a |
Sometimes a conference matrix of order ''n'' is just defined as a [[weighing matrix]] of the form ''W''(''n, n''−1), where |
||
''W''(''n,w'') is said to be of weight ''w''>0 and order ''n'' if it is a |
''W''(''n,w'') is said to be of weight ''w'' > 0 and order ''n'' if it is a square matrix of size ''n'' with entries from {−1, 0, +1} satisfying ''W W''<sup> T</sup> = ''w I''.<ref name="Gropp" /> Using this definition, the zero element is no more required to be on the diagonal, but it is easy to see that still there must be exactly one zero element in each row and column. For example, the matrix |
||
:<math>\begin{pmatrix}1& 0& 1& 1\\0& -1& -1& 1\\ |
:<math>\begin{pmatrix} |
||
1& 0& 1& 1\\ |
|||
0& -1& -1& 1\\ |
|||
1& -1& 0& -1\\ |
|||
1& 1& -1& 0 |
|||
\end{pmatrix}</math> |
|||
would satisfy this relaxed definition, but not the more strict one requiring the zero elements to be on the diagonal. |
would satisfy this relaxed definition, but not the more strict one requiring the zero elements to be on the diagonal. |
||
A conference design is a generalization of conference matrices to non-rectangular matrices. A conference design C is an <math>N \times k</math> matrix, with entries from {−1, 0, +1} satisfying <math>W^{\mathrm{T}} W = (N-1)I_k</math>, where |
|||
| ⚫ | |||
<math>I_k</math> is the <math>k \times k</math> identity matrix and at most one zero in each row. |
|||
| ⚫ | |||
The foldover designs of conference designs can be used as definitive screening designs.<ref>Xiao et al. (2012)</ref><ref>Schoen et al. (2018)</ref> |
|||
| ⚫ | Belevitch obtained complete solutions for conference matrices for all values of ''n'' up to 38 and provided circuits for some of the smaller matrices. An ''ideal conference network'' is one where the loss of signal is entirely due to the signal being split between multiple conference subscriber ports. That is, there are no dissipation losses within the network. The network must contain ideal transformers only and no resistances. An ''n''-port ideal conference network exists if and only if there exists a conference matrix of order ''n''. For instance, a 3-port conference network can be constructed with the well-known [[hybrid transformer]] circuit used for 2-wire to 4-wire conversion in telephone handsets and line repeaters. However, there |
||
| ⚫ | |||
| ⚫ | |||
| ⚫ | Belevitch obtained complete solutions for conference matrices for all values of ''n'' up to 38 and provided circuits for some of the smaller matrices. An ''ideal conference network'' is one where the loss of signal is entirely due to the signal being split between multiple conference subscriber ports. That is, there are no dissipation losses within the network. The network must contain ideal transformers only and no resistances. An ''n''-port ideal conference network exists if and only if there exists a conference matrix of order ''n''. For instance, a 3-port conference network can be constructed with the well-known [[hybrid transformer]] circuit used for 2-wire to 4-wire conversion in telephone handsets and line repeaters. However, there is no order 3 conference matrix and this circuit does not produce an ''ideal'' conference network. A resistance is needed for matching which dissipates signal, or else signal is lost through mismatch.<ref>Belevitch, pp.240-242</ref> |
||
{{Gallery |
{{Gallery |
||
|width=300 |
|width=300 |
||
|height=300 |
|height=300 |
||
|File:Conference matrix 6-port.svg|Belevitch's implementation of the 6-port ideal conference network |
|File:Conference matrix 6-port.svg|Belevitch's implementation of the {{nowrap|6-port}} ideal conference network |
||
|File:Conference matrix 10-port.svg|Belevitch's implementation of the 10-port ideal conference network |
|File:Conference matrix 10-port.svg|Belevitch's implementation of the {{nowrap|10-port}} ideal conference network |
||
}} |
}} |
||
As mentioned above, a necessary condition for a conference matrix to exist is that ''n'' |
As mentioned above, a necessary condition for a conference matrix to exist is that ''n''−1 must be the sum of two squares. Where there is more than one possible sum of two squares for ''n''−1 there will exist multiple essentially different solutions for the corresponding conference network. This situation occurs at ''n'' of 26 and 66. The networks are particularly simple when ''n''−1 is a perfect square (''n'' = 2, 10, 26, ...).<ref>Belevitch, p.242</ref> |
||
==Notes== |
==Notes== |
||
| Line 48: | Line 58: | ||
==References== |
==References== |
||
* {{cite journal | author = Belevitch V | year = 1950 | title = Theory of 2''n''-terminal networks with applications to conference telephony | journal = Electrical Communication | volume = 27 | pages = 231–244 }} |
|||
* Goethals, J.M., and Seidel, J.J. (1967), Orthogonal matrices with zero diagonal. <em>Canadian Journal of Mathematics</em>, vol. 19, pp. 1001-1010. |
|||
* {{cite journal | author = Goethals J.M., Seidel J.J. | year = 1967 | title = Orthogonal matrices with zero diagonal | journal = Canadian Journal of Mathematics | volume = 19 | pages = 1001–1010 | doi=10.4153/cjm-1967-091-8| s2cid = 197456608 | doi-access = free }} |
|||
| ⚫ | |||
* {{cite journal | author = Lili Xiao and Dennis K. J. Lin and Fengshan Bai | year = 2012 | title = Constructing Definitive Screening Designs Using Conference Matrices | journal = Journal of Quality Technology | volume = 44 | pages = 2–8 | number = 1 | doi =10.1080/00224065.2012.11917877| s2cid = 116145147 }} |
|||
| ⚫ | |||
| ⚫ | |||
| ⚫ | |||
| ⚫ | |||
| ⚫ | |||
| ⚫ | |||
| ⚫ | |||
* {{cite journal | title = A Classification Criterion for Definitive Screening Designs | author = Eric D. Schoen, Pieter T. Eendebak, Peter Goos | year=2018 | journal=Annals of Statistics}} |
|||
==Further reading== |
|||
* N. A. Balonin, Jennifer Seberry, [https://ro.uow.edu.au/cgi/viewcontent.cgi?referer=&httpsredir=1&article=3757&context=eispapers "A Review and New Symmetric Conference Matrices"], ''Research Online'', University of Wollongong, 2014. Appendix lists all known and possible conference matrices up to 1002. |
|||
{{Matrix classes}} |
|||
{{DEFAULTSORT:Conference Matrix}} |
|||
[[Category:Matrices]] |
[[Category:Matrices]] |
||
[[Category:Algebraic graph theory]] |
[[Category:Algebraic graph theory]] |
||
[[sl:Konferenčna matrika]] |
|||
Revision as of 06:41, 15 June 2024
In mathematics, a conference matrix (also called a C-matrix) is a square matrix C with 0 on the diagonal and +1 and −1 off the diagonal, such that CTC is a multiple of the identity matrix I. Thus, if the matrix has order n, CTC = (n−1)I. Some authors use a more general definition, which requires there to be a single 0 in each row and column but not necessarily on the diagonal.[1][2]
Conference matrices first arose in connection with a problem in telephony.[3] They were first described by Vitold Belevitch, who also gave them their name. Belevitch was interested in constructing ideal telephone conference networks from ideal transformers and discovered that such networks were represented by conference matrices, hence the name.[4] Other applications are in statistics,[5] and another is in elliptic geometry.[6]
For n > 1, there are two kinds of conference matrix. Let us normalize C by, first (if the more general definition is used), rearranging the rows so that all the zeros are on the diagonal, and then negating any row or column whose first entry is negative. (These operations do not change whether a matrix is a conference matrix.) Thus, a normalized conference matrix has all 1's in its first row and column, except for a 0 in the top left corner, and is 0 on the diagonal. Let S be the matrix that remains when the first row and column of C are removed. Then either n is evenly even (a multiple of 4) and S is skew-symmetric (as is the normalized C if its first row is negated), or n is oddly even (congruent to 2 modulo 4) and S is symmetric (as is the normalized C).
Symmetric conference matrices
If C is a symmetric conference matrix of order n > 1, then not only must n be congruent to 2 mod 4 but also n − 1 must be a sum of two squares;[7] there is a clever proof by elementary matrix theory in van Lint and Seidel.[6] n will always be the sum of two squares if n − 1 is a prime power.[8]
Given a symmetric conference matrix, the matrix S can be viewed as the Seidel adjacency matrix of a graph. The graph has n − 1 vertices, corresponding to the rows and columns of S, and two vertices are adjacent if the corresponding entry in S is negative. This graph is strongly regular of the type called (after the matrix) a conference graph.
The existence of conference matrices of orders n allowed by the above restrictions is known only for some values of n. For instance, if n = q + 1 where q is a prime power congruent to 1 mod 4, then the Paley graphs provide examples of symmetric conference matrices of order n, by taking S to be the Seidel matrix of the Paley graph. The first few possible orders of a symmetric conference matrix are n = 2, 6, 10, 14, 18, (not 22, since 21 is not a sum of two squares), 26, 30, (not 34 since 33 is not a sum of two squares), 38, 42, 46, 50, 54, (not 58), 62 (sequence A000952 in the OEIS); for every one of these, it is known that a symmetric conference matrix of that order exists. Order 66 seems to be an open problem.
Example
The essentially unique conference matrix of order 6 is given by
- .

All other conference matrices of order 6 are obtained from this one by flipping the signs of some row and/or column (and by taking permutations of rows and/or columns, according to the definition in use).
Skew-symmetric conference matrices
Skew-symmetric matrices can also be produced by the Paley construction. Let q be a prime power with residue 3 mod 4. Then there is a Paley digraph of order q which leads to a skew-symmetric conference matrix of order n = q + 1. The matrix is obtained by taking for S the q × q matrix that has a +1 in position (i, j ) and −1 in position (j, i) if there is an arc of the digraph from i to j, and zero diagonal. Then C constructed as above from S, but with the first row all negative, is a skew-symmetric conference matrix.
This construction solves only a small part of the problem of deciding for which evenly even numbers n there exist skew-symmetric conference matrices of order n.
Generalizations
Sometimes a conference matrix of order n is just defined as a weighing matrix of the form W(n, n−1), where W(n,w) is said to be of weight w > 0 and order n if it is a square matrix of size n with entries from {−1, 0, +1} satisfying W W T = w I.[2] Using this definition, the zero element is no more required to be on the diagonal, but it is easy to see that still there must be exactly one zero element in each row and column. For example, the matrix

would satisfy this relaxed definition, but not the more strict one requiring the zero elements to be on the diagonal.
A conference design is a generalization of conference matrices to non-rectangular matrices. A conference design C is an matrix, with entries from {−1, 0, +1} satisfying , where is the identity matrix and at most one zero in each row. The foldover designs of conference designs can be used as definitive screening designs.[9][10]




Telephone conference circuits

Belevitch obtained complete solutions for conference matrices for all values of n up to 38 and provided circuits for some of the smaller matrices. An ideal conference network is one where the loss of signal is entirely due to the signal being split between multiple conference subscriber ports. That is, there are no dissipation losses within the network. The network must contain ideal transformers only and no resistances. An n-port ideal conference network exists if and only if there exists a conference matrix of order n. For instance, a 3-port conference network can be constructed with the well-known hybrid transformer circuit used for 2-wire to 4-wire conversion in telephone handsets and line repeaters. However, there is no order 3 conference matrix and this circuit does not produce an ideal conference network. A resistance is needed for matching which dissipates signal, or else signal is lost through mismatch.[11]
-
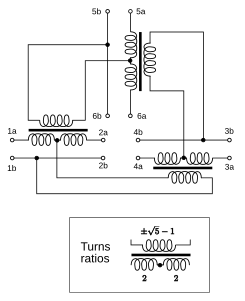 Belevitch's implementation of the 6-port ideal conference network
Belevitch's implementation of the 6-port ideal conference network -
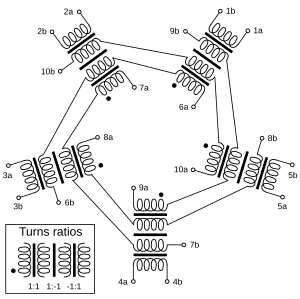 Belevitch's implementation of the 10-port ideal conference network
Belevitch's implementation of the 10-port ideal conference network


As mentioned above, a necessary condition for a conference matrix to exist is that n−1 must be the sum of two squares. Where there is more than one possible sum of two squares for n−1 there will exist multiple essentially different solutions for the corresponding conference network. This situation occurs at n of 26 and 66. The networks are particularly simple when n−1 is a perfect square (n = 2, 10, 26, ...).[12]
Notes
- ^ Greig Malcolm (2006). "On the coexistence of conference matrices and near resolvable 2-(2k+1,k,k-1) designs". Journal of Combinatorial Theory, Series A. 113 (4): 703–711. doi:10.1016/j.jcta.2005.05.005.
- ^ a b Gropp Harald (2004). "More on orbital matrices". Electronic Notes in Discrete Mathematics. 17: 179–183. doi:10.1016/j.endm.2004.03.036.
- ^ Belevitch, pp. 231-244.
- ^ Colbourn and Dinitz, (2007), p.19
van Lint and Wilson, (2001), p.98
Stinson, (2004), p.200 - ^ Raghavarao, D. (1959). "Some optimum weighing designs". Annals of Mathematical Statistics. 30 (2): 295–303. doi:10.1214/aoms/1177706253. MR 0104322.
- ^ a b van Lint J.H., Seidel J.J. (1966). "Equilateral point sets in elliptic geometry". Indagationes Mathematicae. 28: 335–348.
- ^ Belevitch, p.240
- ^ Stinson, p.78
- ^ Xiao et al. (2012)
- ^ Schoen et al. (2018)
- ^ Belevitch, pp.240-242
- ^ Belevitch, p.242
References
- Belevitch V (1950). "Theory of 2n-terminal networks with applications to conference telephony". Electrical Communication. 27: 231–244.
- Goethals J.M., Seidel J.J. (1967). "Orthogonal matrices with zero diagonal". Canadian Journal of Mathematics. 19: 1001–1010. doi:10.4153/cjm-1967-091-8. S2CID 197456608.
- Lili Xiao and Dennis K. J. Lin and Fengshan Bai (2012). "Constructing Definitive Screening Designs Using Conference Matrices". Journal of Quality Technology. 44 (1): 2–8. doi:10.1080/00224065.2012.11917877. S2CID 116145147.
- Seidel, J.J. (1991), ed. D.G. Corneil and R. Mathon, Geometry and Combinatorics: Selected Works of J.J. Seidel. Boston: Academic Press. Several of the articles are related to conference matrices and their graphs.
- Colbourn, Charles J.; Dinitz, Jeffrey H. (2007) Handbook of Combinatorial Designs, Boca Raton, Florida: Chapman and Hall/CRC Press, ISBN 1-58488-506-8.
- van Lint, Jacobus Hendricus; Wilson, Richard Michael (2001) A Course in Combinatorics, Cambridge: Cambridge University Press, ISBN 0-521-00601-5.
- Stinson, Douglas Robert (2004) Combinatorial Designs: Constructions and Analysis, New York: Springer, ISBN 0-387-95487-2.
- Eric D. Schoen, Pieter T. Eendebak, Peter Goos (2018). "A Classification Criterion for Definitive Screening Designs". Annals of Statistics.
{{cite journal}}: CS1 maint: multiple names: authors list (link)
Further reading
- N. A. Balonin, Jennifer Seberry, "A Review and New Symmetric Conference Matrices", Research Online, University of Wollongong, 2014. Appendix lists all known and possible conference matrices up to 1002.